Изобретение относится к робототехнике и может быть использовано при создании очувствленных дистанционных копирующих манипуляторов.
Цель изобретения - повышение точности устройства.
На чертеже представлена блок-схема предлагаемого устройства.
Устройство содержит усилитель 1, гидропривод 2, датчик 3 угла исполнительного органа, первый сумматор 4, электропривод 5, упругий элемент 6, датчик 7 момента, второй сумматор 8, датчик 9 давления, датчик 10 угла задающего органа, пульт 11 управления оператора, исполнительный орган 12, нелинейный элемент 13, блок 14 выделения модуля, блок 15 умножения, электрогидроусилитель 16.
Устройство работает следующим образом.
При проведении рабочих операций оператор с пульта 11 управления воздействует на упругий элемент 6. Датчик 7 момента замеряет деформацию упругого элемента 6, т. е. вырабатывает сигнал, пропорциональный силовому воздействию оператора, который через блок 14 выделения модуля поступает на второй вход блока 15 умножения, управляя его коэффициентом передачи в зависимости от усилия управления, а также на первый вход первого сумматора 4, на второй вход которого подается сигнал с датчика 9 давления, пропорциональный силовому воздействию исполнительного органа 12 и его нагрузки. Разностный сигнал с выхода первого сумматора 4, который в установившемся режиме пропорционален скорости движения исполнительного органа 12, управляет через усилитель 1 и электрогидроусилитель 16 гидроприводом 2. Одновременно этот разностной сигнал поступает на вход элемента 13, который формирует сигнал, пропорциональный входному, с учетом величины сухого трения, действующего в электроприводе 5 задающего органа, и имеет зависимость выходного напряжения от входного
ГК ивх+Ь при
к UBX-b при и., выходное напряжение нелинейного элемента 13;
К- -коэффициент пропорциональности; UBV - входное напряжение нелинейного
элемента 13; b - начальное смещение, пропорциональное величине сухого трения в электроприводе 5.
С выхода нелинейного элемента 13 сигд нал через блок 15 умножения поступает на третий вход второго сумматора 8, где он суммируется с сигналом, пропорциональным угловому положению выходного вала гидропривода 2, измеряемому с помощью датчика 3 угла, сигнал с которого подает0 СИ на первый вход второго сумматора 8. Электропривод 5 осуществляет слежение задающего органа за движением исполнительного органа 12 под действием сигнала, поступающего с выхода второго сумматора 8, пропорционального разности угловых положений выходных валов гидропривода 2 и электропривода 5, угловое положение которого измеряется с помощью датчика 10 угла, сигнал с которого поступает на второй вход второго сумматора 8, и сигнала с выхода блока 15 умножения, компенсируюпаего влияние сухого трения в электроприводе 5 и усилия управления со стороны оператора на точность копирования задающим органом движения исполнительного органа 12.
Применение изобретения позволяет повысить точность копирования задающим органом движения исполнительного органа, что улучшает плавность движения задающего органа, снижает утомляемость оператора, сокращая время проведения рабочих операций.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления дистанционным манипулятором | 1978 |
|
SU737917A2 |
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1112341A2 |
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU883862A2 |
| Устройство для управления дистанционным манипулятором | 1983 |
|
SU1095129A2 |
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1061987A2 |
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU950519A2 |
| Устройство для управления дистанционным манипулятором | 1977 |
|
SU639699A2 |
| Устройство для управления дистанционным манипулятором | 1985 |
|
SU1313692A1 |
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1033308A2 |
| Устройство для управления дистанционным манипулятором | 1988 |
|
SU1650428A2 |
УПРАВЛЕНИЯ ДИСТАНЦИОННЫМ МАНИПУЛЯТОРОМ по авт. св. № 582960, отличающееся тем, что, с целью повышения точности устройства, оно содержит блок выделения модуля и последовательно соединенные нелинейный элемент и блок умножения, выход которого подключен к третьему в.ходу второго сумматора, а второй вход - к выходу блока выделения модуля, соединенного входом с пыходом датчика момента, а вход нелинейного элемента подключен к выходу первого сумматора. (Л ю /f f 1 а: 00 J оо со ел J Ю 8 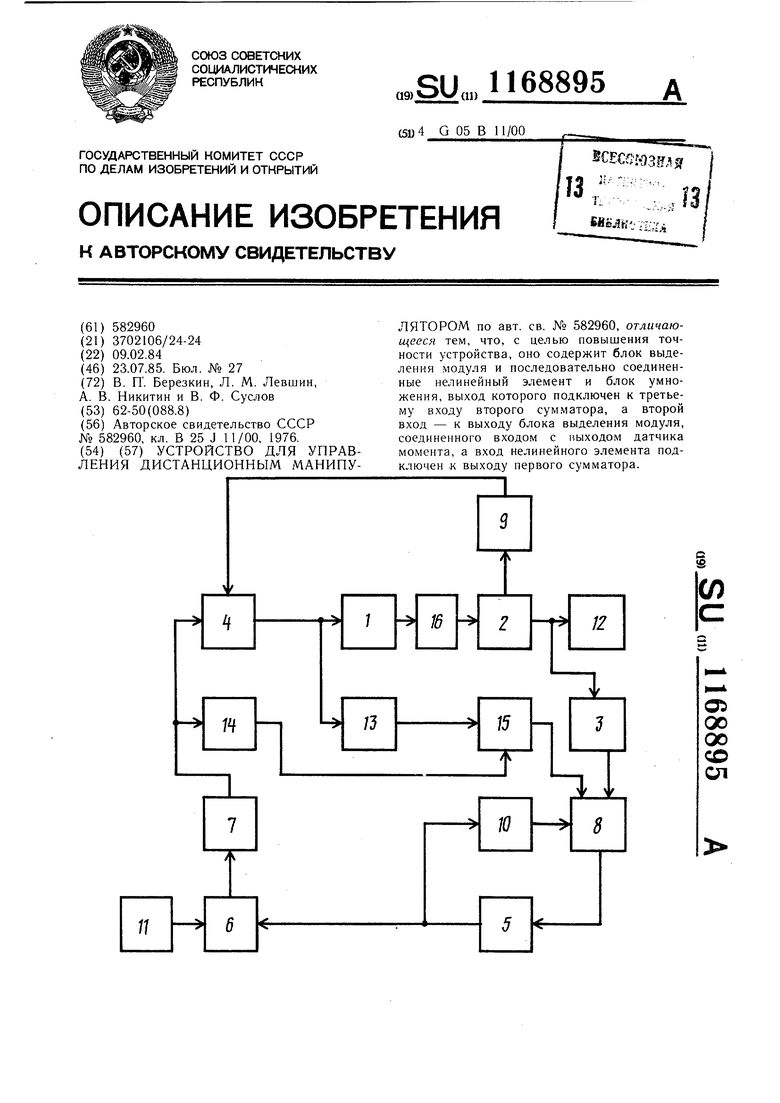
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Устройство для управления дистанционным манипулятором | 1976 |
|
SU582960A1 |
