113
Изобретение относится к горной - промьшшенности и может быть использовано для измерения углов наклона горной мап1ины, например проходческого комбайна в продольной и поперечно плоскостях.
Цель изобретения - повьшшние точности измерений при малых углах наклона горной машр1ны.
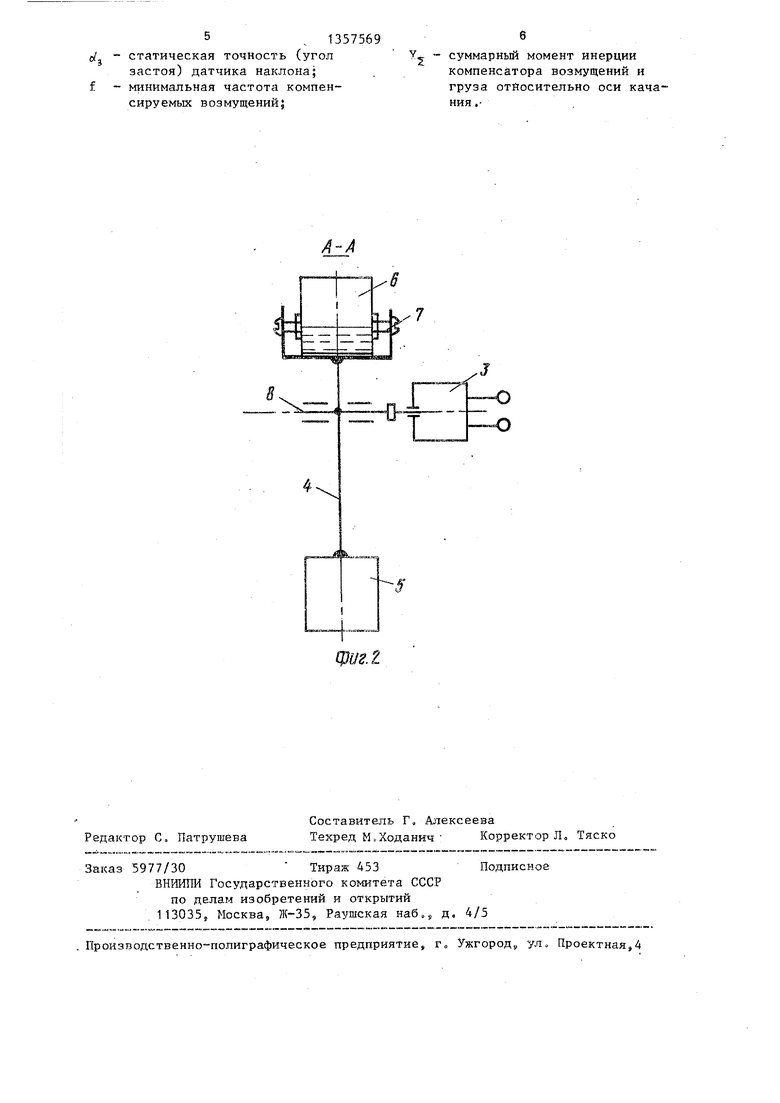
На фиг. 1 приведена схема датчика наклона; на фиг. 2 - разрез А-А на фиг, 1.
Датчик содержит корпус 1, установленный на опорах 2, размещенные внутри корпуса 1 регистрирующий блок 3 и маятниковый узел, состоящий из двуплечего рычага 4 с грузом 5 на его нижнем плече и компенсатор 6 возмущений, установленньш в направ- хряющей 7, закрепленной на верхнем плче рычага 4, перпендикулярно оси 8 подвеса и качания.
. В качестве регистрирующего блока может быть использован, например, по тенциометрический или фотоэлектрический датчик,, входной вал которого связан с осью 8 качания.
Принцип действия датчика угла наклона основан на физической сущности работы маятника как простейшего указателя вертикали.
Датчик угла наклона работает следующим образом.
При наклоне горной машины, например в поперечной плоскости, корпус 1 с опорой 2 отклоняется от вертикали, заданной положением маятникового узла и регистрирую1ций блок 3 снимает отсчет этого отклонения по отношению к рычагу 4. При наличии наклона продольной оси машины корпус 1 поворачивается свободно под действием силы тяжести в опоре 2 на угол, близкий углу продольного наклона, чем достигается инвариантность датчика к угла наклона в продольной плоскости и по- вьрается его точность и надежность. Так как компенсатор 6 возмущений закреплен в направляющей 7 с помощью винтов, то балансировку его осуществляют следуюш;им образом: ослабляют регулировочные винты и перемещают компенсатор 6 возмущений в плоскости
качания до тех пор, пока ось рычага 4 не совпадет с вертикальной осью (при нулевом угле наклона датчика). Этим устраняется статические погрешности датчика наклона.
0
5
0
25
Принцип действия компенсатора 6 возмущений основан на компенсации каждой составляющей возмущений, а -именно поперечных ускорений, периодических и случайных колебаний, наиболее характерных для горных, в частности проходческих машин.
Поперечные ускорения, обусловленные на проходческих машинах в основном их разворотами и изменением скорости подачи рабочих органов, менее влияют на точность измерений угла наклона, чем периодические и случайные колебания. С учетом этого в данном компенсаторе возмущений применен принцип частичной компенсации поперечных ускорений с учетом обеспечения требуемой статической точности угла наклона. Рассмотрим более подробно этот принцип.
При действии на датчик угла наклона, находящийся в состоянии покоя поперечного ускорения, на верхнем и нижнем плечах рычага возникают вращающие моменты, направленные в противоположные стороны. Условие полной их взаимокомпенсации (без учета момента трения) можно записать в виде
30
1
РД,
(О,
Груза, сосуда компенсатора и жидкости;
о/, 1 - длина соответственно нижнего и верхнего и плеч рьмага.
ем частичной компенсации по - ускорений является соотно
(Р.
Р.)
1 iP,-L.
(2)
45
50
Уточним соотношение (2) с учетом обеспечения требуемой статической точности, под которой понимают величину половины зоны статической нечувствительности (определяется углом забоя) величину которой выводят из условия статического равновесия
sinc/3-Fcl з1по;з-р.и(о/,)+13-Мт 0,
(3)
1(о(0 повьшение центра тяжести жидкости от основания cof суда;;
момент трения рычага в опоре.
31357569
Для малой величины угла забоя можно принять 1(с/,) 0.
Тогда зависимость (3) можно представить в виде .
sino/Jp L - (PC + РЖ)-
Откуда с учетом sin малых углов)
Mj.
3 (P,+ Р,,)
(PC
Р,)1
р L г- с/,
Так как выражение (6) удовлетворяет условию (2), то оно является математическим выражением принципа оптимальной компенсации поперечных ускорений с обеспечением заданной величины статической точности.
Дпя компенсации периодических колебаний, обусловленньк на проходческих машинах в основном частотой вращения режущих органов (или автоколе баниями скорости подачи) в предлагаемом датчике угла наклона принят известный принцип увеличения периода собственных колебаний маятниковой системы и обеспечение тем самым его нечувствительности к более высоким частотам возмущающих колебаний.
Для малых колебаний датчика угла наклона с уче;том известных зависимостей
Т Yp-b
i yLrtl tl- 2 Tf (7)
PL IP.-L
максимальный период ко- лебаний маятниковой сис-п темы с учетом возмущающих колебаний;
суммарный момент инерции системы, равный сумме моментов инерции груза сосуда с жидкостью, относительно оси колебания.
С учетом
f J.
1 Т
где f - минимальная частота компенсируемых периодических возмущений, можно из вьфажения (7) найти оптимальное значение параметров нижнего маятника
W
и, подставив его в зависимость (6), получить общее выражение для выбора основных параметров компенсатора возмущений
10
(10)
15
20
Компенсация случайных колебаний в данном датчике угла наклона осуществляется одновременно также демпфи- ро ванием возникающих колебаний за счет выбора существенно отличающихся периода колебаний лсидкости .в компенсаторе возмущений и периода колебаний маятникового узла.
Компенсация возникающих возмущений в продольной плоскости осуществляется аналогичньши способами, как и для Поперечных возмущений, только ко- 25 лебательными системами в данном слу- д чае будут корпус 1 датчика угла наклона и компенсатор 6 возмущений, совер- щающие колебания относительно оси опор 2.
30
Формула изобретения
Датчик угла наклона горной мащины, содержащий корпус с опорой, регистрирующий блок и маятниковьм узел, вьшол- ненный в виде двуплечего рычага с грузом на его нижнем плече и компенсатора возмущений, установленного перпендикулярно оси подвеса и качания на верхнем плече, отличающийся тем, что, с целью повышения точности измерений при малых углах наклона горной машины, он снаб- жен направляющей, в которой закреплен компенсатор возмущений, при этом массу компенсатора возмущений и длину верхнего плеча двуплечего рычага выбирают из соотношения
50
РК PrL
- MI 4
3
f 2у - MI
I 2. с/3
Р - масса компенсатора возмущений;
Р - масса груза; L - длина рерхнего и нижнего
. плеч двуплечего рычага; М, - момент трения в опоре закрепления датчика;
5 1357569
- статическая точность (угол
застоя) датчика наклона; минимальная частота компенсируемых возмущений;
6
суммарный момент инерции компенсатора возмущений и груза отйосительно оси качания .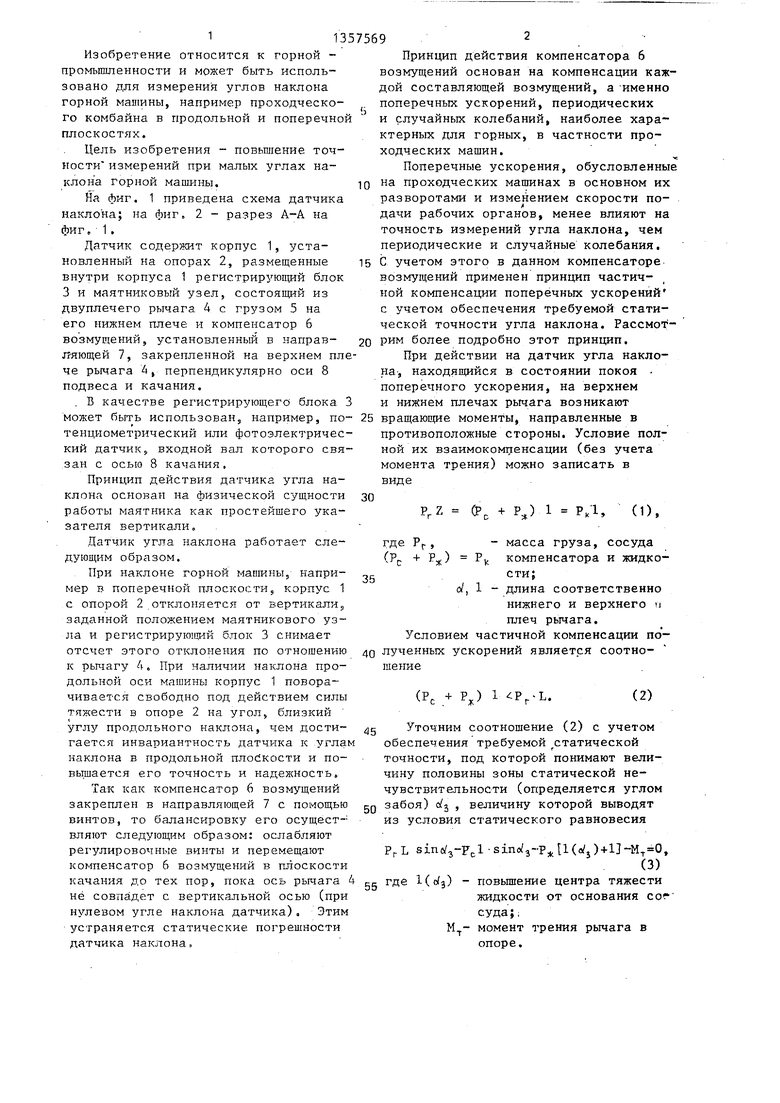
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК УГЛА НАКЛОНА ГОРНОЙ МАШИНЫ | 1992 |
|
RU2018635C1 |
| Способ защиты от вибрации и устройство для его осуществления | 2017 |
|
RU2669914C2 |
| Устройство для намотки нитевидного материала | 1987 |
|
SU1557041A1 |
| Устройство для определения углов наклона подвижных объектов | 1976 |
|
SU727992A1 |
| Способ демпфирования вагонов и устройство для его осуществления | 2017 |
|
RU2669043C2 |
| АНТИШОКОВАЯ ПОДВЕСКА | 2018 |
|
RU2676843C1 |
| Устройство для определения и регистрации взаимного положения рельсовых нитей в вертикальной плоскости | 2017 |
|
RU2676951C1 |
| ПОГРУЗОЧНОЕ УСТРОЙСТВО ПРОХОДЧЕСКОГО ЩИТА | 1996 |
|
RU2121578C1 |
| Большегрузные весы | 1981 |
|
SU994923A1 |
| КОНВЕЙЕРНЫЕ ВЕСЫ | 2001 |
|
RU2193759C1 |
Изобретение относится к горной автоматике и позволяет с высокой точностью измерять малые углы наклона горной машины. Датчик содержит корпус 1 с опорой 2, регистрирующий блок I 3 и маятниковый узел в виде двуплечего рычага 4 с грузом 5 на его нйжнем плече. На верхнем плече рычага 4 закреплена направляющая 7, в которой з акреплен компенсатор возмущений (KB) 6 перпендикулярно оси 8 подвеса и ка- .чания. Sec КБ и длину верхнего плеча рычага 4 выбирают из соотношения Рк1 РгЬ - f ys - Мт/« з9 где Р, - вес KB; Р - вес груза; 1, L - длина верхнего и нижнего плеч «рычага; М - момент трения в опоре закрепления датчика; статическая точность (угол застоя) датчика; f - минимальная частота компенсируемых возмущений; У - суммарный момент инерхщи КБ 6 и(Груза 5 относительно оси 8. При наличии наклона гбрной ма|шины корпус 1 поворачивается в опоре 2. Блок 3 регистрирует это отклонение по отношению к рычагу 4. Случайные отклонения компенсируются KB 6. Его принцип работы основан на компенсации каждой составляющей возмущений .поперечныхi ускорений, периодических и случайн ых возмущений. 2 ил. с (О
J
Редактор С. Патрушева
Составитель Г, Алексеева
Техред М.Ходанич Корректор Л, Тяско
Заказ 5977/30 Тираж 453Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035j Москва, }К-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, т, Ужгород, ул. Проектная,4
| Датчик угла наклона | 1975 |
|
SU545863A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Датчик наклона подвижного объекта | 1978 |
|
SU857707A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
