(k) ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1984 |
|
SU1272459A1 |
| Электропривод переменного тока | 1980 |
|
SU989730A1 |
| Электропривод переменного тока (его варианты) | 1984 |
|
SU1249686A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1453574A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Электропривод переменного тока | 1984 |
|
SU1220100A2 |
| Устройство для частного управленияэлЕКТРОпРиВОдОМ пЕРЕМЕННОгО TOKA | 1978 |
|
SU794701A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| Частотно-управляемый электропривод | 1988 |
|
SU1527701A1 |
| Устройство для управления электроприводом переменного тока | 1977 |
|
SU738090A1 |
.
Изобретение относится к электротехнике и может 6jTb использовано в механизмах и машинах, требующих плавг ного перехода от пускового режима к режиму частотного управления.
Известен электропривод с машиной двойного питания и преобразователем частоты с непосредственной связью, блоком задания и формирования активной и реактивной составляющих токов ротора и статора, блоками прямого и обратного преобразований координат, управляемых от генераторов гармонических функций, с использованием управляющих сигналов, заменяюи|их сигналы с выхода датчика углового положения ротора Cl 3.
Наиболее близким к изобретению является электропривод переменного тока, содержащий асинхронный электродвигатель с преобразователем частоты в цепи ротора, блок формирования гармонических сигналов, выходы которого соединены с опорными входами блока прямого преобразования координат, выход которого соединен с управляющим входом прео азователя частоты, а аналоговые входы - с выходам ми блока формирования активной и реактивной составляющих тока ротора, которые соединены с задающими входами блока регулирования скольжения, информационные входы которого соединены с выходами по активной и ре10активной составляюир м блока вычисления активной и реактивной составляющих тока ротора, входы которого подключены к выходам датчиков тока и напряжения статора и объединены с
15 входами блока вычисления потокосцепления статора, выход которого подключен к одному из входов блока деления, сумматор 12.
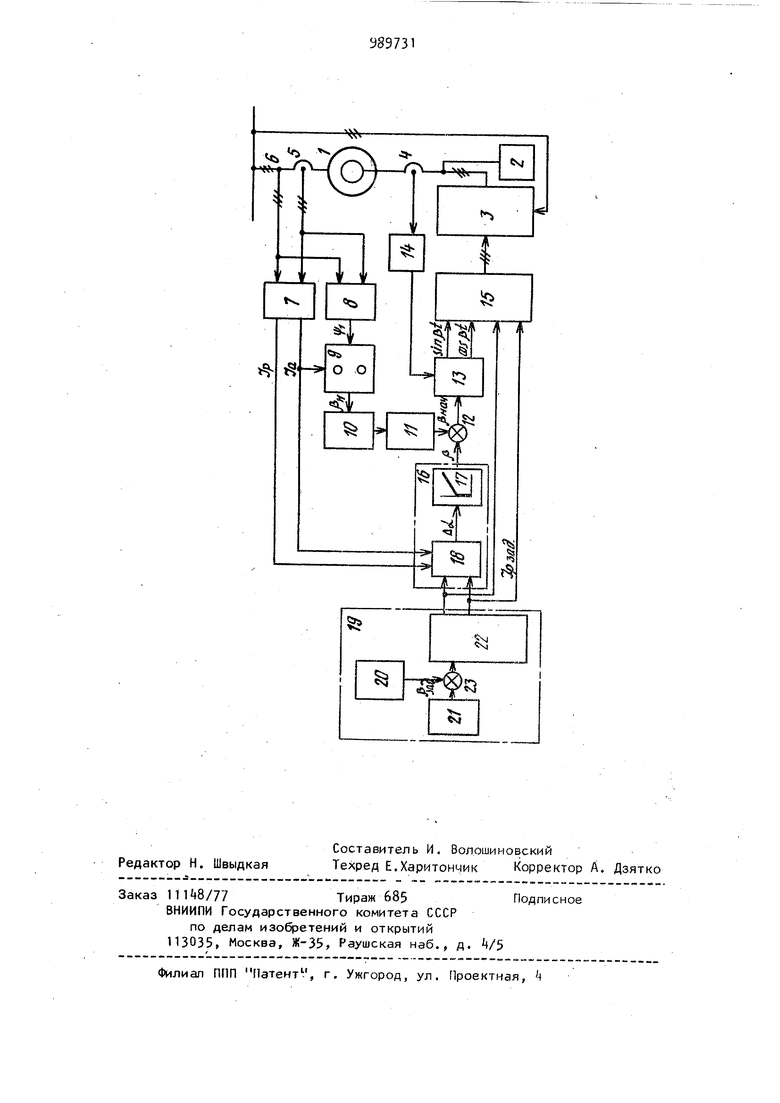
Недостатком известных электропри20вддов является возникновение всплесков тока и бросков электромагнитного момента во время коммутации обмоток ротора с пускового реостата или ко3У8роткозамыкателя ма выход преобразователя частоты, что снижает надежность и точность работы электропривода. Цель изобретения - повышение надежности и увеличение точности. Указанная цель достигается тем, что в электропривод переменного тока содержащий асинхронный электродвигатель с преобразователем частоты в це пи ротора, блок формирования гармонических сигналов, выходы которого .соединены с опорными входами блока прямого преобразования координат, вы ход которого соединен с управляющим входам преобразователя частоты, а . аналоговые - с выходами блока формирования активной и реактивной- составляющих тока ротора, которые соединены с задающими, входами блока регулирования скольжения, информационные входы которого соединен с выходаж по активной и реактивной составляющим блока вычисления эктйвной и реактивной составляющих тока ротора, входы которого подключены к выходам .датчиков тока и напряжения статора и объединены с входами блока вычисления потокосцепления статора, выход которого подключен к одному из входов блока деления, сумматор, введены блок 1памяти и два ключевых бло ка, выход датчика тока ротора снабже индикатором фазы тЬка ротораi а блок формирования гармонических сигналов снабжен управляющим входом, к которому через первый ключевой блок подключен выход индикатора фазы тока ротора, а к задающему входу подключен выход сумматора, один из входов которого подключен к выходу блока pe гулирования скольжения, а другой вход - к выходу блока памяти, вход которого через второй ключевой блок подключен к выходу блока деления, другой вход которого подключен к выходу по активной составляющей блока вычисления активной и реактивной составляющих тока ротора. На чертеже изображена функциональ ная схема электропривода переменного тока. Асинхронный электродвигатель 1 с фазным ротором содержит в цепи ротор короткозаМыкатель и пусковой реостат 2, преобразователь 3 частоты, работающий в режиме источника тока, а также датчик Ц тока ритора, датчик 5 и датчик 6 напряжения в цепи статдра, к выходам которых подключены блок 7 вычисления активной и реактивной составляющих тока ротора и блок 8 вычисления потокосцепления статора, блок 9 деления один из входов которого подключен к выходу блока 8, а другой - к выходу по активной составляющей тока ротора блока 7, выход блока У через ключевой блок 10 подключен к блоку 11 памяти выход которого присоединен к одному из входов сумматора 12, выход которого соединен с задающим входом блока 13 формирования гармонических сигналов, управляющий вход которого через ключевой блок 1А подключен к индикатору фазы на выходе датчика 4, выходы блока 13 подключены к опорным входам I блока 11J прямого преобразования координат, многофазный выход которого соединен с управляющим входом поеобразователя. З.блок 16 регулирования сколь.жения содержит регулятор 17 пропорционально-интегрального типа, входом соединенный с выходом фазового дискриминатора 18, информационные входы которогосоединены с выходами блока 7, а задающие объединены с аналоговыми входами блока 15 и подключены к выходу блока 19 формирования сигналов задания активной и реактивной составляющих тока ротора, содержащего блок 20 слежения за частотой сети, содержащий датчик ч стоты напряжения сети, кварцевый генератор и компаратор на выходе, блок 21 задания скольжения , блок 22.задания составляющих тока ротора, выходы которого образуют выходы блока 19,а вход соединен с выходом сумматора 23, один из входов которого соединён с выходом блока 20, а другой с выходом блока 21. Электропривод переменного тока функционирует следующим образом. В режиме разгона обмотки ротора подключены к пусковому реостату 2, а в короткозамкнутом режиме - к короткозамыкателю, выход преобразователя 3 отключен ot обмоток ротора, ключевой блок 1 осуществляет соединение индикатора фазы на выходе датчика k с управляющим входом блока 13, ключевой блок 10 осуществляет соединение между блоками 9 и 11. При этом непрерывно на управляющий вход блока 13 поступает синхросигнал, информирующий о перехаде через нуль КРИВОЙ тока в одной из фаз. обмоток ротора. На задающий вход блока 13 приходит сигнал о текущем значении скольжения с выхода сумматора 12, на один из входов которого поступает нулевой сигнал с выхода блока 16, а на другой из вхо дов - сигнал непрерывно запоминающий ся в блоке 11, а вырабатываем 1й в блоке 9 как частнре от деления вычй ленного сигнала активной составляющей тока ротора на вычисленный сигнал потокосцепления статора, В блоке 7 непрерывно рирабатываются сигна лы активной и реактивной составляющих тока ротора и подаются на информационные входы блока 16, но на его выходе сигнал отсутствует, так как равны нулю сигналы на его задающих вхрдах. Поэтому отсутствуют сигналы и на аналоговых входах блока 15. 8 момент коммутации обмоток ротора на выходе преобразователя 3 частоты раз мыкаются ключи в блоках 10 и I, при этом на выходе блока 11 запоминается сигнал о величине скольжения в мо мент коммутации, который спадает - до нуля по мере возникновения сигнала на выходе блока 16. Начальная фаза сигналов с блока 13 задается такой, при которой разомкнулся ключ в блоке 1. Блок 22 также начинает вырабатывать сигналы задания активной и реактивной составляющих тока ротора, поэтому на входах блоков .15 и 18 появляются аналоговые сигналы. После спадания до нуля сигнала н - выходе блока 11 его функция переходит полностью к.блоку 16. Скорость вращения регулируется за счет изменения сигнала на выходе блока 21 , С которым суммируется сигнал с выхода блока 20, пропорциональный отклонению частоты питающей сети ,от номинальной. Благодаря этому скорост . вращения оказывается инвариантной относительно флуктуации частоты питающей сети. Активная составляющая тока ротсчэа формируется пропорционально сигналу с выхода сумматора 23, а реактивная составляющая пропорционально сигналу с выхода потенциометрического задатчика, расположенного в блоке 22. Таким образом, изобретение поэвог ля,ет уменьи1ить число простоев технологического оборудования за счет сокращения аварийных ситуаций при коммутации обмоток ротора асинхр ного электродвигателя, а также по316высить точность поддержания сксчэости ротора. Формула изобретения Электропривод переменного тока, содержащий асинхронный электродвигатель с греобразователем частоты в цепи ротора, блок формирования гармонических сигналов, выходы которого соединены с оперными входами блока прямого преофазования координат, выход которого соединен с управляющим входом прео азователя частоты, а аналоговые входы - с выходами блока формирования активной и реактивной составляющих тока ротора, которые соединены с задаюи 1 1 входами блока регулирования скольжения, информационные входы, которого со1адинены с выходами по активной и реактивной составляющим блока вычисления активной И реактивной составлякнцих тока ротора, входы KOTqjoro подключены к выходам датчиков тока.и напряжения статора и объединены с входами блока вычисления потокосцепления статора, выход которого подключен к одному из входов блока деления, сумматор, о тл и ч а ю щ и и с я тем, что, с целью повышения надежности и увеличения точности, в него введены блок памяти, два ключевых блока и выход датчика тока ротора снабжен индикатором; фазы тока ротора, а блок формирования гармонических сигналов снабжен управляющим входом, к которому через первый ключевой блок подключен выход индикатора фазы тока ротора, а к задающему входу подключен выход сумматора, один из входов которого подключен к выходу блока регулирования скодьжения, а другой вход - к выходу блока памяти, вход которого через второй ключевой блок подключен к выходу блока деления, другой вход которого .подключен к выходу по активной составляющей блока -вычисления активной и реактивной составляющих тока ротора. Источники информации. Принятые во внимание при экспертизе 1.Авторское свидетельство СССР 67556В, кл. Н 02 Р 7А2;, 1976. 2.Авторское свидетельство СССР по заявке № 29 i678/2 -07, кл. Н 02 Р 7Л2, 1979.
