4
00 00
со о ел
10
15
1 1А38965
. Изобретение относится к машиностроению, в частности к устройствам управления оборудованием для обработки давлением.
Целью изобретения является повышение точности позиционирования и производительности пресса путем повышения быстродействия следящей системы . .
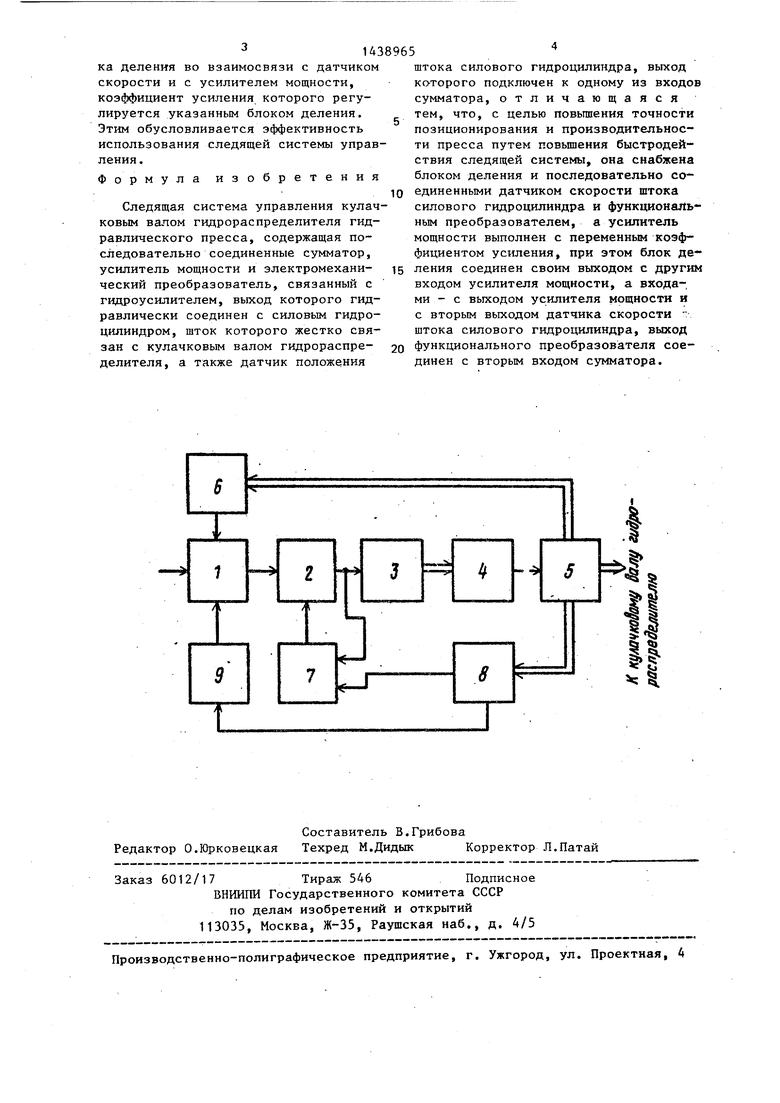
На чертеже показана структурная схема следящей системы.
Следящая система содержит последовательно соединенные сумматор 1, усилитель 2 мощности, электромеханический преобразователь 3, гидроусилитель 4 и силовой гидроцилиндр 5, свя- заиньш с кулачковым валом гидрораспределителя и через датчик 6 положения штока силового гидроцилиндра с 20 сумматором-1, блок 7 деления, соединенный электрически с выходом и с вторым входом усилителя 2 мощности, а также с выходом датчика 8 скорости; который механически связан со штоком 25 силового гидроцилиндра 5, а электрически - через функциональный преобразователь 9 - с сумматором 1. Причем усилитель 2 мощности выполнен с переменным коэффициентом усиления, регу- JQ луруемым блоком 7 деления.
Следящая система работает следующим образом.
Сигнал рассогласования, пришедший на вход сумматора 1, суммируется с сигналом, пришедшим с выхода функционального преобразователя 9, пропор- циональнь1м квадрату скорости штока силового гидроцилиндра 5, и с сигналом, пришедшим с выхода датчика 6 положения. Сигнал, поступающий с выхода сумматора 1,, пропорциональный вел ичине перемещения штока силового гидроцилиндра 5 для достижения точки позиционирования, усиливается усилителем 2 мощности и вызывает перемещение электромеханическим преобразователем 3 подвижного звена гидроусилителя 4, подающего рабочую жидкость в полость силового гидроцилиндра 5, шток которого поворачивает кулачковый вал гидрораспределителя в заданное положение позиционирования. Сигнал, пропорциональный скорости штока гидроцилиндра, а следовательно, и улачкового вала поступает с -датчика 8 скорости на вход функционального преобразователя 9 и на вход блока 7 еленияi на другой вход которого по35
40
45
50
55
с мо ти на ву мо ра об го ст ло ро си по ци
пе ше чи ни ба
вт оп К ны че не ци ен
гд
I
гд
ще
ще ре но ст ци до
0
5
0 5Q
5
0
5
0
5
ступает сигнал с выхода усилителя 2. мощности. При остатке тормозного пути до точки позиционирования функциональный преобразователь 9, воздействуя через сумматор 1, усилитель 2 мощности и электромеханический преобразователь 3 на гидроусилитель 4, обеспечивает торможение штока силового гидроцилиндра 5 с оптимальным постоянным ускорением. Нео.бходимьм условием повьш1ения точности позиционирования и быстродействия следящей системы при этом является сохранение постоянным оптимальным общего коэффициента передачи следящей системы KQ.
Оптимизация общего коэффициента передачи вызывается тем, что уменьшение его приводит к увеличению величины статической ошибки, а увеличение - к появлению режима автоколебаний.--,
Блок 7 деления, воздействуя на второй вход усилителя 2 мощности, определяет его коэффициент передачи К пропорциональным отношению величины сигнала и на входе электромеханического преобразователя 3 к величине V скорости штока силового гидроцилиндра 5. Таким образом, коэффициент передачи усилителя мощности
U
К,т.-,
где га - коэффициент пропорциональI ности;
KU - коэффициент передачи кан.ала электромеханический преобразователь - гидроусилитель - силовой гидроцилиндр определяется соотношением
. u где V - скорость штока силового гидроцилиндра;
U - величина сигнала на входе в электромеханический преобразователь.
Общий коэффициент передачи следя- системы выражается
щей
, Ко т- . V U
Таким образом, при работе следящей системы ее общий коэффициент передачи является величиной постоянной и оптимальной с точки зрения достижения максимальной точности позиционирования и быстродействия. Это достигается эа счет применения бло-
ка деления во взаимосвязи с датчиком скорости и с усилителем мощности, коэффициент усиления которого регулируется указанным блоком деления. Этим обусловливается эффективность использования следящей системы управления . Формула изобретения
Следящая система управления кулачковым валом гидрораспределителя гидравлического пресса, содержащая последовательно соединенные сумматор, усилитель мощности и электромеханический преобразователь, связанный с гидроусилителем, выход которого гидравлически соединен с силовым гидроцилиндром, шток которого жестко связан с кулачковым валом гидрораспределителя, а также датчик положения
штока силового гидроцилиндра, выход ко-торого подключен к одному из входов сумматора, отличающаяся тем, что, с целью повышения точности позиционирования и производительности пресса путем повьшения быстродействия следящей системы, она снабжена блоком деления и последовательно соединенными датчиком скорости штока силового гидроцилиндра и функциональным преобразователем, а усилитель мощности выполнен с переменным коэффициентом усиления, при этом блок деления соединен своим выходом с другим входом усилителя мощности, а входами - с выходом усилителя мощности и с вторым выходом датчика скорости : штока силового гидроцилиндра, выход
функционального преобразователя соединен с вторым входом сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сервопривод управления валом гидрораспределителя ковочного гидравлического пресса | 1988 |
|
SU1720894A1 |
| Сервопривод управления валом гидрораспределителя ковочного гидравлического пресса | 1989 |
|
SU1731652A1 |
| Сервопривод управления валом гидрораспределителя гидравлического пресса | 1988 |
|
SU1555144A1 |
| Сервопривод управления валом гидрораспределителя ковочного гидравлического пресса | 1989 |
|
SU1691137A1 |
| Система управления валом гидрораспределителя пресса | 1987 |
|
SU1530487A1 |
| Сервопривод кулачкового вала гидравлического пресса | 1988 |
|
SU1570931A1 |
| Следящая система управления валом гидрораспределителя гидравлического пресса | 1987 |
|
SU1504103A1 |
| Сервопривод управления валом гидрораспределителя гидравлического пресса | 1987 |
|
SU1581602A1 |
| Следящая система управления валом гидрораспределителя гидравлического пресса | 1987 |
|
SU1548083A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
Изобретение относится к машиностроению, в частности к устройствам управления оборудованием для обработки давлением. Цель - повьшение точности позиционирования и производительности пресса путем повьшения родействия следящей системы. Для этого коэффициент передачи системы меняется в зависимости от сигнала блока деления. Последний вырабатывает сигнал, пропорциональный отношению сигнала на входе электромеханического преобразователя к сигналу скорости штока силового гидроцилиндра. Таким образом, поддержание оптимального коэффициента передачи обеспечивает достижение наибольшего быстродействия системы управления при отсут- ствии в ней автоколебаний. Это обус- S ловливает эффективность использования предлагаемой системы. 1 ил. (Л
| Хохлов В.А | |||
| Электрогидравлический следящий привод | |||
| - М.: Наука, 1966, с | |||
| Камневыбирательная машина | 1921 |
|
SU222A1 |
