113
Изобретение относится к технике автоматического регулирования инерционных объектов со значительным запаз дьшанием и неконтролируемыми возмущениями .
Цель изобретения - повышение динамической точности регулирования.
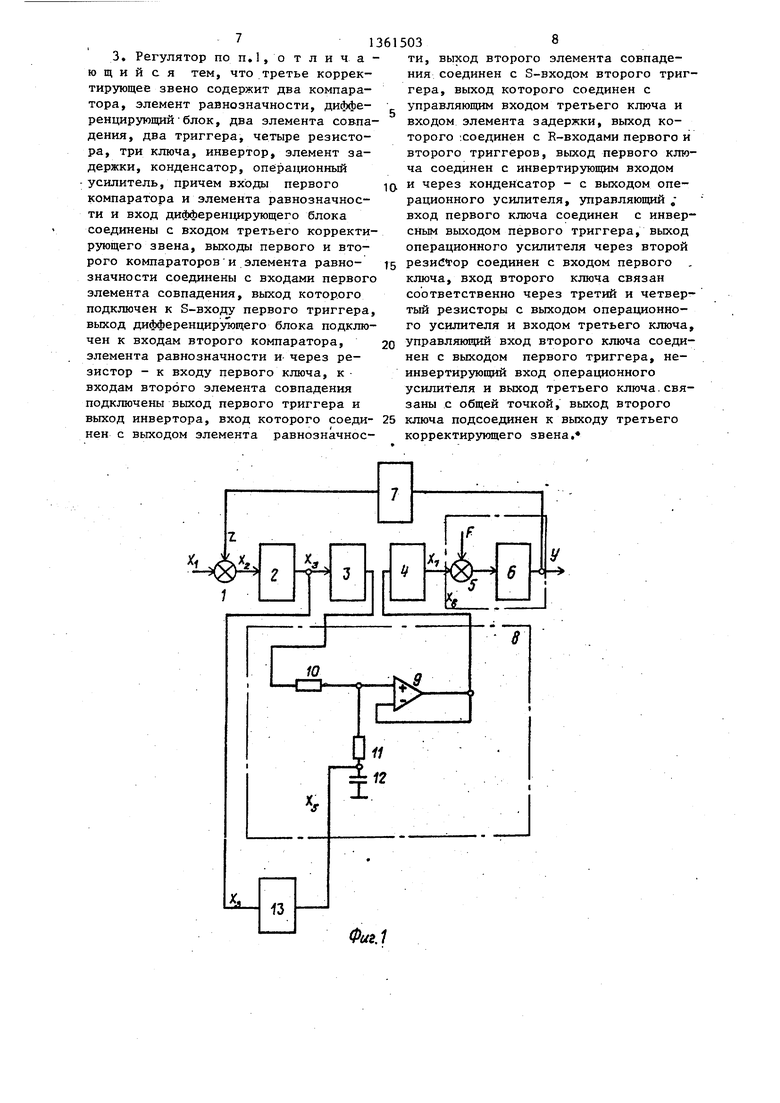
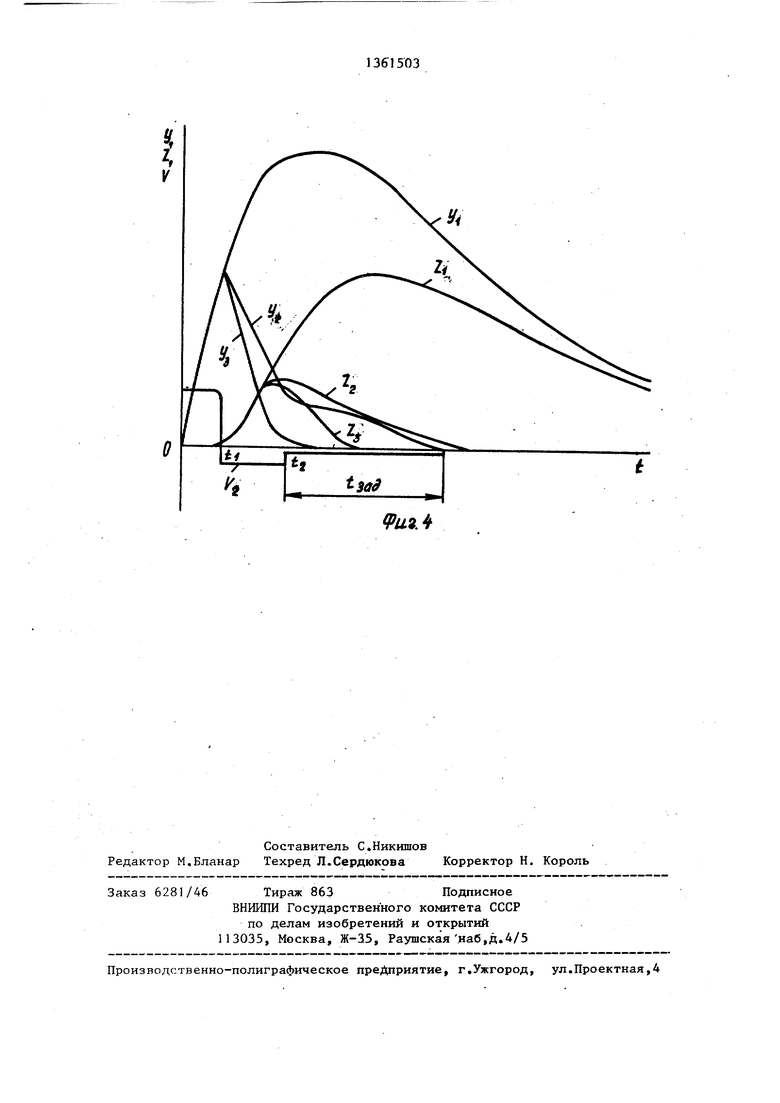
На фиг.1 представлена блок-схема регулятора для объектов с запаздьша- нием и блок-схема второго корректирующего устройства; на фиг,2 - блок- схема третьего корректирующего звена на фиг.З - логарифмические амплитудно-частотные характеристики (ЛАЧХ) ; на фиг,4 - характеристики переходных процессов отработки возмущений,
Схема содержит (фиг,1) сумматор 1 усилитель 2 рассогласования, первое корректирующее звено 3, усилитель 4 мощности, сумматор 5, объект 6 регулирования, датчик 7 обратной связи, второе корректирующее звено 8, операционный усилитель 9, резисторы 10 и 11, конденсатор 12 и третье корректирующее звено 13. Последнее содержит первый двухпороговый компаратор 14, первый элемент 15 совпадения, первьй триггер 16, второй элемент 1 7 совпадения, второй триггер 18, элемент 19 задержки, дифференцирующий блок 20, второй двухпороговый компаратор 21, элемент 22 равнозначности, инвертор 23, первый 24, второй 25, третий 26 и четвертый 27 резисторы конденсатор 28, операционный усилитель 29, первый 30, второй 31 и третий 32 ключи (фиг.2).
Регулятор работает следующим образом.
При малых возмущениях Р и малых задак щих воздействиях X, корректирующее устройство 13 не срабатьшает, воздействие Xj. отсутствует, работают лишь первое 3 и второе В корректирующие устройства, С помощью этих устройств обеспечивается наклон ЛАЧХ скорректированной системы 20 дБ/дек (фиг,3). Характеристика L показывает изломы, которые имели бы место при отсутствии дифференцирующих звеньев, компенсирующих инерцию объекта - излом на частоте (Oj() и инерцию датчика обратной связи - излом на частоте со J(), Частота среза выбирается из условий устойчивости и показателей качества регулирования с учетом запаздьшания.
По схеме (фиг,1) постоянные времени определяются следующими выражениями:
c.jR,oR,.);
т,
НК.(Р)
(1)
Передаточная функция второго корректирующего звена ТгР + Т, 1
Передаточная функция первого корректирующего звена
НК,(Р) (2)
При этом Т, Tj, Т Излом, соответствующий Т, выходит за пределы фиг.З, т.е. имеет место при (.р . Передаточная функция разомкнутой системы с учетом корректирующих звеньев 3 и 8 имеет вид ., ,pv K(T,P+l)()
раП ГтТР+ТТТт „р+ТТТтГр+ПТтГР+Т
. (3) При Tj Тд и т, Тд имеют
Нра,(Р) - т7р- Т7Тт;р + Т7
Можно трактовать корректирующие звенья 3 и В как элементы, реализую- щие обратную модель объекта без запаздьшания. Такая линейная САР характеризуется малым быстродействием и большими динамическими ошибками. На
фиг,4 приведен пример кривых изменения выходной координаты Y, объекта 6 и выходного сигнала Z датчика 7 обратной связи при отключенном звене 13 и большом скачке возмущения F,
рассчитанные на ЭЦВМ, Возмущение F принято таким, чтобы без регулятора оно вызьшало отклонение выхода на 10% от диапазона изменения Y. При работе только линейной части регулятора максимальное отклонение выхода Y составляет 3,8%, а время регулирования, соответствующее уменьшению Y до 0,3% .
tp 260с или t
22
Назначение корректирующего звена 13 - уменьшить максимум отклонения Y и сократить время регулирования при значительных рассогласованиях Х. Практически для систем стабилизации важно обеспечить быстрое отрабатывание рассогласований, вызванных возмущающими воздействиями. Величина возмущающего воздействия отражается
на величине скорости изменения рассогласования
V б dt . .
при фиксированной величине самого рассогласования Х , По известным передаточным функциям объекта 6 регулирования и датчика обратной связи рассчитываются зависимости X 2f( (Ь) для ряда фиксированных знг1- чений F, а также зависимости V f(t) для тех же значений F, Если принять коэффициенты ус иления объекта 6 регулирования, датчика 7 обратной связи и усилителя 4 мощности, равными единице, а коэффициент усиления рассогласования 2 равным К 100, то для рассматриваемого примера справедливы следующие выражения с учетом того, что Xj Z при X, 0:
Т„е
-t/To
- Т.е
-t/T
F(l - ).(5)
V F
.-l/T, t/T
TO- ТА
По графикам Х f,(t) для фикси- ,рованного значения Х 6 делаются выборки значений tj , соответствующих каждому из F- . Каждому значению соответствует по-графикам V .) свое значение Vg. Далее определяется ап, проксимируютцая функция
V,
f,(F).
Для рассматриваемого б 22-10
примера при
V (0,01 + 0,41 F). 10 Оценка F по величине V,
,-г
Р F 244(V - 10
Поскольку малые отклонения Y устраняются линейной частью регулятора, а корректирующее звено 13 предназначено для быстрого предотвращения больших отклонений Y, вполне приемлема линейная аппроксимация. При этом
F « 215 V.
Корректирующее звено 13 срабатывает при Х и V5-,
Выбор коэффициента форсировки
К
f
i
УП
производится по условию снижения Y до нуля к моменту времени изменения знака V. Поскольку участки кривых
Y(t) (фиг.4) до начала работы корректирующего звена 13 (t О - t,) и от t до t близки к прямолинейным.
то можно выбирать ния
t,
К
f
из соотношеК
1 +
д.
Ч-t,
(фиг.4)
(9)
По графикам 1,8. В момент времени
получают К
f
t необходимо
снизить Х от значения X
и сохранять
до значения
Х
Р
Р это
пока величина уровня у (/V/
сигнал до тех пор, V не снизится ниже Рассогласование X при этом может быть и больше величины б , так как срабатывание КУЗ происходит по совпадению трех условий:
/XJ /V/i sign X sign V.(10
40
50
25
30
35
Таким образом предотвращается повторное срабатывание корректирующего звена 13, которое привело бы к самораскачиванию регулятора. Отключение корректирующего звена I3 производится по. истечении времени t .. задержки элемента 19 задержки, кото- рое выбирается по условию /VJ i у при всех возможных возмущениях в системе.
Сигнал рассогласования Х усиливается усилителем 2, что облегчает построение последующих узлов. Компаратор 14 срабатывает при , что соответствует /X,/ Vj,, . Компаратор 21 выдает единичный сигнал при /V/ 5: )р J что соответствует I Х;, I г V . Элемент равнозначности 22 выдает логическую единицу при sign Xj sign Х, т.е. при sign Xj 45 sign V. При соблюдении условий (Ю). триггер 16 устанавливается в единичное состояние. При этом размыкается цепь ключа 30 и замыкается цепь ключа 31. Размыкание ключа 30 переводит операционный усилитель 29 в режим хранения, имеющегося на его выходе напряжения, пропорционального .
Ключ 31 передает это напряжение на вход операционного усилителя 9, корректирующим звеном осуществляется форсированное снижение отклонения регулируемого параметра Y, вызванного возмущающим воздействием F. Когда
55
скорость изменения рассогласования изменит свой знак, на выходе инвертора 23 появляется логическая единица и срабатывает триггер 18. Это вызывает замыкание ключа 32 и начало отсчета времени элементом 19 задержки. Замыкание ключа 32 обусловливает снижение Xj- в К раз. Сопротивления резисторов 26 и 27 выбираются из условия
17
К
f R,
(15)
Значение X ,. К F
при разомкнуто ключе 32 обеспечивается параметрами усилителя 2 рассогласования дифференцирующего блока 20 и сопротивлениями резисторов 24 и 25. Произведение емкости конденсатора 28 на -сопротивление резистора 25 должно быть значит тельно меньше величины Г для получения пренебрежимо малого запаздывания процесса заряда конденсатора 28.
В течение времени t,g. задержки элемента 19 задержки скорость изме
нения Х должна снизиться ниже веектов с запаздыванием, второй вход
личины и компаратор 21 должен пере- сумматора связан с вторым входом ключиться в исходное состояние с ло- регулятора для объектов.с запазды- гическим нулем на выходе. По исте- зо ванием, отличающийся чении времени t ,дд выходным сигналом. тем, что, с целью повьшения динамичеэлемента 19 задержки оба триггера возвращаются в исходное состояние.
Конденсатор 12 в конце работы имеет заряд и напряжение, соответствующие величине Fp, Делитель, образованный для сигнала X резисторами 1 и 10, имеет коэффициент передачи, близкий к единице, Для рассматривае- мого примера
35
, -liu,
ской точности регулирования, в него введено третье корректирующее звено, причем выход сумматора через усилитель рассогласования соединен с входами первого и третьего корректирующих звеньев, выход первого корректирующего звена подключен к первому входу йторого корректирующего звена,
Q соединенному вторым входом с выходом третьего корректирующего звена, вход усилителя мощности соединен с выходом второго корректирующего звена. 2, Регулятор по п.1, о т л и ч а- ю щ и и с я тем, что второе корректирующее звено содержит операционный усилитель, первый вход второго корректирующего звена через последова- тельно соединенные два резистора
К„
. i.rSl (16) R,o+R. т,
и составляет 0,988,
После отключения корректирующего звена 13 непрерьшная часть регулятора обеспечивает устранение остаточного отклонения регулируемой величины.
Характеристики Zj (фиг.4) получены при этом же возмущении, что и характеристики Y, HZ,, но при работе корректирующего звена 13. При этом максимальное отклонение Y уменьшается до 2,3%, а время регулирования до значения tp 33 с или tp 2,75 ь , что в 8 раз меньше, чем при отсутствии корректирующего звена 13, Кривые Y, и Zj демонстрируют малую чувствительность системы к от3615036
клонениям параметров. Для точной на- стройки (кривые У, и Z,) принят К 1,8, для кривых Y. и Zj принят Кд, 1,3, Тем не менее и кривые Y, Z соответствуют вполне удовлетворительной интенсивной обработке возмущения. Сопоставление интегралов от ошибки за время регулирования показывает, 10 что для кривой Y эта величина в 11 раз меньше, чем для кривой Y,, т.е, происходит повьш1ение динамической точности.
мула изобретения
Ф о р
1. Регулятор для объектов с запаздыванием, содержащий сумматор., усилитель рассогласования, два корректиру- звена, датчик обратной связи, вход и выход которого подключены соответственно к первому входу регулятора для объектов с запаздьгаанием и к первому входу сумматора, и уси- литель мощности, выход которого соединен с выходом регулятора для объсумматора связан с вторым входом регулятора для объектов.с запазды- о ванием, отличающийся тем, что, с целью повьшения динамиче5
, -liu,
ской точности регулирования, в него введено третье корректирующее звено, причем выход сумматора через усилитель рассогласования соединен с входами первого и третьего корректирующих звеньев, выход первого корректирующего звена подключен к первому входу йторого корректирующего звена,
Q соединенному вторым входом с выходом третьего корректирующего звена, вход усилителя мощности соединен с выходом второго корректирующего звена. 2, Регулятор по п.1, о т л и ч а- ю щ и и с я тем, что второе корректирующее звено содержит операционный усилитель, первый вход второго корректирующего звена через последова- тельно соединенные два резистора
Q и конденсатор соединен с шиной нулевого потенциала, второй вход второго корректирующего звена связан с точкой соединения второго резистора и конденсатора, точка соединения
5 первого и второго резисторов связана с входом операционного усилителя, выход которого подключен к его инвертирующему входу и выходу второго корректирующего звена.
5
1
3, Регулятор по П.1, о т л и ч а - ю щ и и с я тем, что третье корректирующее звено содержит два компаратора, элемент равнозначности, дифференцирующий блок , два элемента совпадения, два триггера, четыре резистора, три ключа, инвертор, элемент задержки, конденсатор, операционный усилитель, причем входы первого компаратора и элемента равнозначности и вход дифференцирующего блока соединены с входом третьего корректирующего звена, выходы первого и второго компараторов и элемента равно- значности соединены с входами первого элемента совпадения, выход которого подключен к S-входу первого триггера, выход дифференцир5тощего блока подключен к входам второго компаратора, элемента равнозначности и через резистор - к входу первого ключа, к- входам второго элемента совпадения подключены вькод первого триггера и выход инвертора, вход которого соеди- нен с выходом элемента равнозначнос038
ти, выход второго элемента совпадения соединен с S-входом второго триггера, выход которого соединен с управляющим входом третьего ключа и входом элемента задержки, выход которого .соединен с R-входами первого и второго триггеров, выход первого ключа соединен с инвертирующим входом и через конденсатор - с выходом операционного усилителя, управляющий , вход первого ключа соединен с инверсным выходом первого триггера, выход операционного усилителя через второй резиСЧ ор соединен с входом первого ключа, вход второго ключа связан соответственно через третий и четвертый резисторы с выходом операционного усилителя и входом третьего ключа, управляющий вход второго ключа соединен с выходом первого триггера, неинвертирующий вход операционного усилителя и выход третьего ключа.связаны с общей точкой, выход второго ключа подсоединен к выходу третьего корректирующего звена,


| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Самонастраивающаяся система комбинированного регулирования | 1987 |
|
SU1509828A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1388826A2 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1386957A1 |
| Самонастраивающаяся система комбинированного регулирования | 1985 |
|
SU1254433A1 |
| Импульсный регулятор | 1984 |
|
SU1238025A1 |
| Многоканальный регулятор | 1982 |
|
SU1100606A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
| Регулятор с переменной структурой | 1978 |
|
SU748346A1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1287100A1 |

Изобретение относится к технике автоматического регулирования, а именно к устройствам для регулирования инерционных объектов со значительными транспортными запаздываниями и неконтролируемыми возмущениями. В регуляторах для объектов -с запаздыванием значительны динамические ошибки в связи с тем, что по условиям устойчивости приходится значительно снижать частоту среза систем, т.е. их быстродействие. С целью повьшения быстродействия при больших возмущениях в регулятор, содержащий непре- рьшные пропорционально-интегрально- дифференцирующие звенья, введено дополнительное цифроаналоговое корректирующее звено логического действия, содержащее два компаратора, два триггера, два элемента совпадения, элемент задержки, дифференцирующий блок, элемент равнозначности, инвертор, операционный усипитель и три ключа. Введение дополнительного корректирующего звена снижает максимальное от--. кланение регулируемой величины, время регулирования и интеграле от ошибки. Интегр ал от ошибки снижается на порядок по сравнению с интегралом от ошибки для непрерывной системы. 2 з.п. ф-лы, 4 ил. i О) 00 оэ ел о со
J1U
U
ri:
s
I
Фиг,1
гоУ
fPu9A
| Регулятор с моделью объекта | 1983 |
|
SU1080118A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для регулирования объекта с запаздыванием | 1977 |
|
SU911463A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
