Изобретение относится к кузнечно- прессовому оборудованию, а именно к устройствам, прёдназначенныг-i для автоматической замены штампов на прессе и является усовершенствованием известного устройства по авт.св. № 1297971.
Известное устройство содержит механизм подачи сменных частей штампов к плитам в виде управляемого робота-манипулятора с приводным упором и размещенными на упоре захват;- ными органами, узел крепления сменных частей штампов- в виде фиксаторов и прижимов с приводом, а также штам- повый стол.
Недостатком известного устройства является низкая надежность его в эксплуатации из-за большого усилия, приложенного сменной частью штампа к фиксаторам в момент центрирования сменной части штампа, так как она оказьшается зажатой между упором и плитой пресса. При этом фиксаторы быстро изнашиваются, точность центрирования уменьшае тся и, как следствие, увеличивается минимальная толщина штампуемого материала. Которая зависит от зазора между пуансоном и матрицей.
Цепью изобретения является повышение надежности устройства.
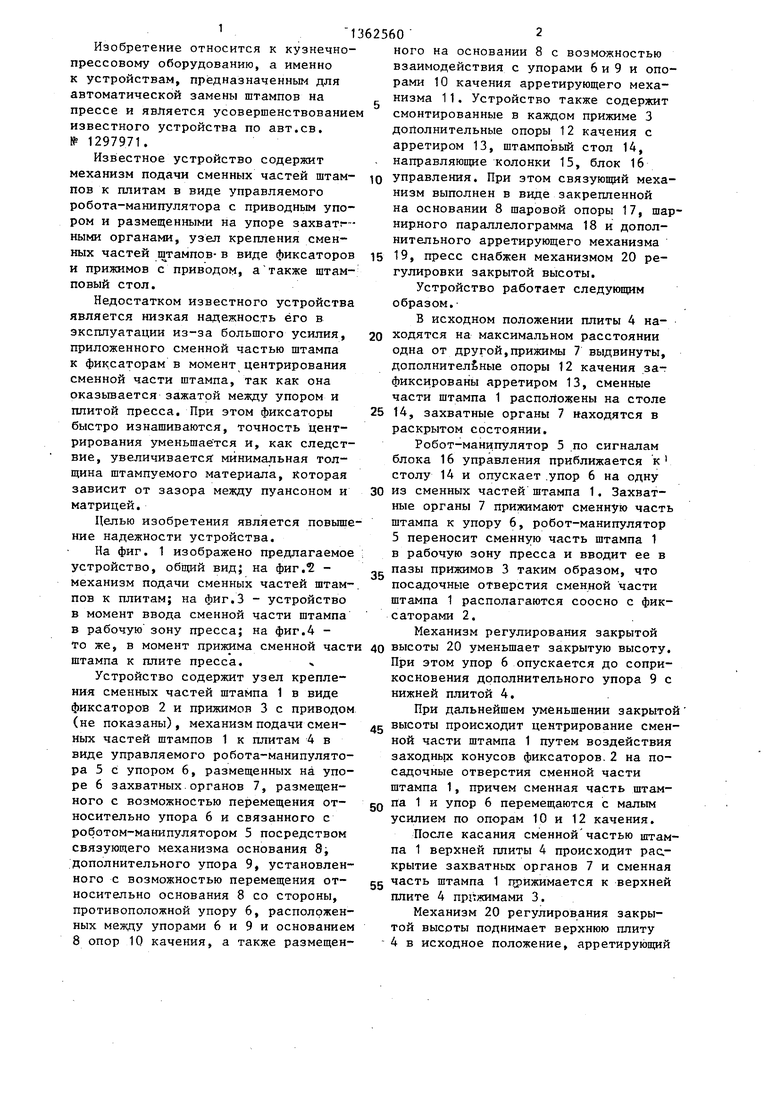
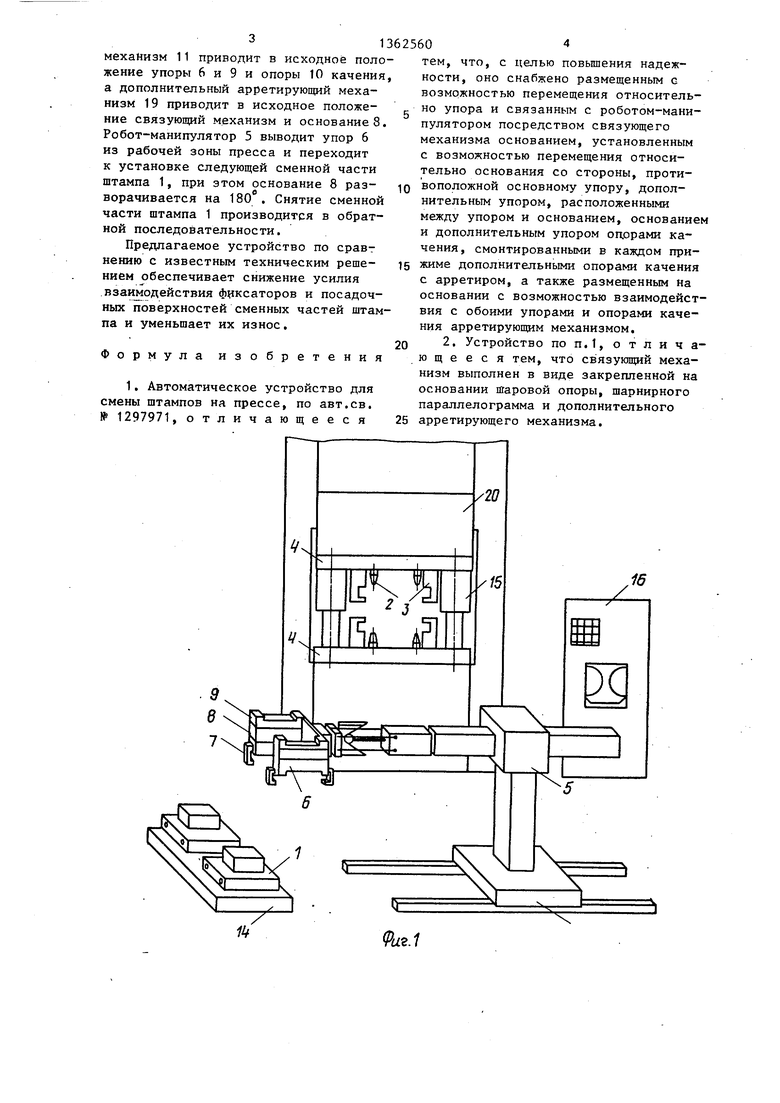
На фиг. 1 изображено предлагаемое устройство, общий вид; на фиг.2 - механизм подачи сменных частей штам-. пов к плитам; на фиг.З - устройство в момент ввода сменной части штампа в рабочую зону пресса; на фиг.4 ного на основании 8 с возможностью взаимодействия с упорами 6 и 9 и опорами 10 качения арретирующего меха- низма 11. Устройство также содержит смонтированные в каждом прижиме 3 дополнительные опоры 12 качения с арретиром 13, штамповьй стол 14, . направляющие колонки 15, блок 16 10 управления. При этом связующий механизм выполнен в виде закрепленной на основании 8 шаровой опоры 17, шарнирного параллелограмма 18 и дополнительного арретирующего механизма 15 19, пресс снабжен механизмом 20 регулировки закрытой высоты.
Устройство работает следующим образом.
В исходном положении плиты 4 на- 20 ходятся на максимальном расстоянии одна от другой,прижимы 7 выдвинуты, дополнительные опоры 12 качения зафиксированы арретиром 13, сменные части штампа 1 расположены на столе 25 14, захватные органы 7 находятся в раскрытом состоянии.
Робот-манипулятор 5 по сигналам блока 16 управления приближается к столу 14 и опускает .упор 6 на одну 30 из сменных частей штампа 1. Захватные органы 7 прижимают сменную часть штампа к упору 6, робот-манипулятор 5 переносит сменную часть штампа 1 в рабочую зону пресса и вводит ее в - пазы прижимов 3 таким образом, что посадочные отверстия сменной части штампа 1 располагаются соосно с фиксаторами 2.
Механизм регулирования закрытой
То же, в момент прижима сменной части 40 высоты 20 уменьшает закрытую высоту.
штампа к плите пресса.
Устройство содержит узел крепления сменных частей штампа 1 в виде фиксаторов 2 и прижимов 3 с приводом (не показаны), механизм подачи сменных частей штампов 1 к плитам 4 в виде управляемого робота-манипулятора 5 с упором 6, размещенных на упоре 6 захватных органов 7, размещенного с возможностью перемещения относительно упора 6 и связанного с роботом-манипулятором 5 посредством связующего механизма основания 8 дополнительного упора 9, установленного с возможностью перемещения относительно основания 8 со стороны, противоположной упору 6, расположенных между упорами 6 и 9 и основанием 8 опор 10 качения, а также размещенного на основании 8 с возможностью взаимодействия с упорами 6 и 9 и опорами 10 качения арретирующего меха- низма 11. Устройство также содержит смонтированные в каждом прижиме 3 дополнительные опоры 12 качения с арретиром 13, штамповьй стол 14, направляющие колонки 15, блок 16 управления. При этом связующий механизм выполнен в виде закрепленной на основании 8 шаровой опоры 17, шарнирного параллелограмма 18 и дополнительного арретирующего механизма 19, пресс снабжен механизмом 20 регулировки закрытой высоты.
Устройство работает следующим образом.
В исходном положении плиты 4 на- ходятся на максимальном расстоянии одна от другой,прижимы 7 выдвинуты, дополнительные опоры 12 качения зафиксированы арретиром 13, сменные части штампа 1 расположены на столе 14, захватные органы 7 находятся в раскрытом состоянии.
Робот-манипулятор 5 по сигналам блока 16 управления приближается к столу 14 и опускает .упор 6 на одну из сменных частей штампа 1. Захватные органы 7 прижимают сменную часть штампа к упору 6, робот-манипулятор 5 переносит сменную часть штампа 1 в рабочую зону пресса и вводит ее в пазы прижимов 3 таким образом, что посадочные отверстия сменной части штампа 1 располагаются соосно с фиксаторами 2.
Механизм регулирования закрытой
При этом упор 6 опускается до соприкосновения дополнительного упора 9 с нижней плитой 4.
При дальнейшем уменьшении закрытой
высоты происходит центрирование сменной части штампа 1 путем воздействия заходньрс конусов фиксаторов. 2 на посадочные отверстия сменной части штампа 1, причем сменная часть штампа 1 и упор 6 перемещаются с малым усилием по опорам 10 и 12 качения.
После касания сменной частью штампа 1 верхней плиты 4 происходит раскрытие захватных органов 7 и сменная
часть штампа 1 прижимается к верхней плите 4 прзтжимами 3.
Механизм 20 регулирования закрытой высоты поднимает верхнюю плиту 4 в исходное положение, арретирующий
31
механизм 11 приводит в исходное положение упоры 6 и 9 и опоры 10 качения а дополнительный арретирующий механизм 19 приводит в исходное положение связующий механизм и основание 8 Робот-манипулятор 5 выводит упор 6 из рабочей зоны пресса и переходит к установке следующей сменной части штампа 1, при этом основание 8 разворачивается на 180 . Снятие сменной части штампа 1 производится в обратной последовательности.
Предлагаемое устройство по сравг нению с известным техническим решением обеспечивает снижение усилия .взаимодействия фиксаторов и посадочных поверхностей сменных частей штампа и уменьшает их износ.
Формула изобретения
1, Автоматическое устройство для смены штампов на прессе, по авт.св. № 1297971, отличающееся
ности, оно снабжено размещенным с возможностью перемещения относительно упора и связанным с роботом-манипулятором посредством связующего механизма основанием, установленным с возможностью перемещения относительно основания со стороны, противоположной основному упору, дополнительным упором, расположенными между упором и основанием, основанием и дополнительным упором опорами качения, смонтированными в каждом прижиме дополнительными опорами качения с арретиром, а также размещенным на основании с возможностью взаимодействия с обоими упорами и опорами качения арретируюшим механизмом,
2. Устройство по п,1, отличающее с я тем, что связующий механизм выполнен в виде закрепленной на основании шаровой опоры, шарнирного параллелограмма и дополнительного арретирующего механизма.
16
Раг.1
J 2
фуг. It
Составитель В.Поникаров Редактор Т.Парфенова Техред А.Кравчук Корректор М.Пожо.
Заказ 6337/8Тираж 583Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
;
r
7
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическое устройство для смены штампов на прессе | 1985 |
|
SU1297971A1 |
| Гибкий технологический модуль | 1986 |
|
SU1586825A1 |
| Автоматизированный комплекс для штамповки деталей из плоского материала | 1986 |
|
SU1375387A1 |
| Устройство для сборки охватываемой и охватывающей деталей типа вал-втулка | 1982 |
|
SU1215255A1 |
| Автоматизированная линия для штамповки деталей из листового материала | 1987 |
|
SU1505639A1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| Устройство Кривовязюка для вырубки заготовок из плоского материала | 1983 |
|
SU1125082A1 |
| Роботизированный комплекс для многопереходной штамповки | 1983 |
|
SU1205972A1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Устройство для подачи заготовок и удаления изделий из штампа | 1989 |
|
SU1738440A1 |
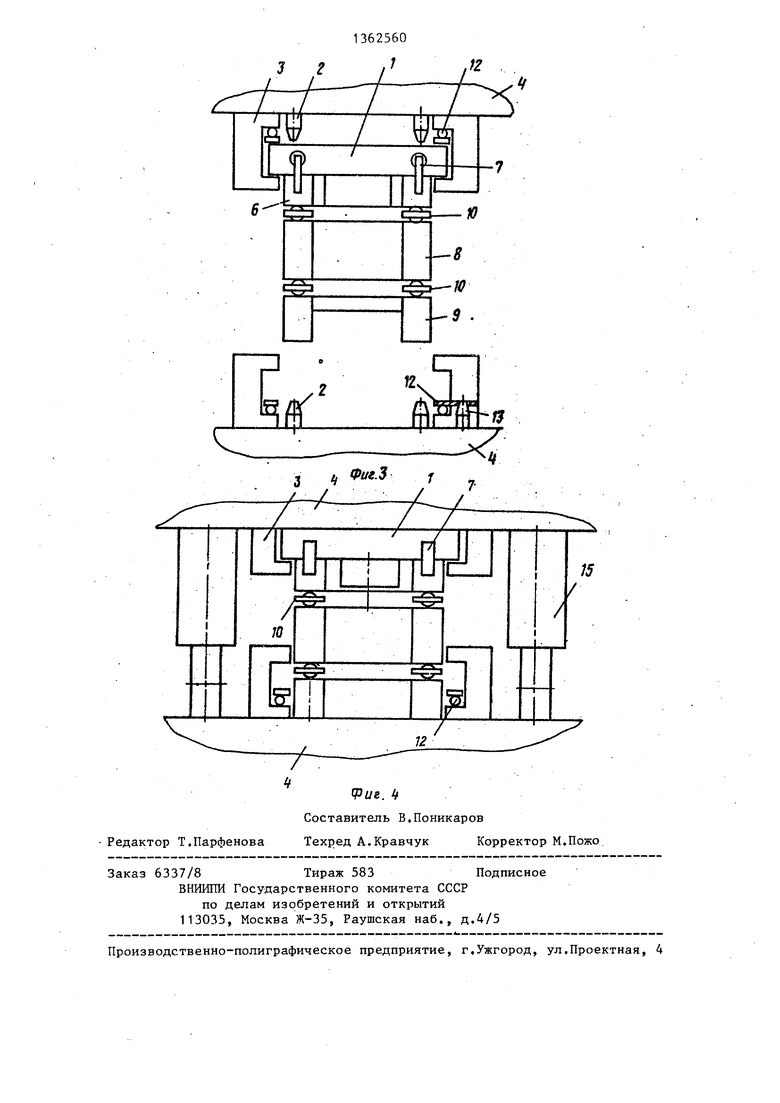
Изобретение относится к кузнеч- но-прессовому оборудованию, а именно к устройствам для автоматической смены штампов на прессе. Цель изобретения - повышение надежности работы устройства. Устройство содержит узел крепления сменных частей штампа (Ш) 1 в виде фиксаторов и прижимов, механизм подачи Ш 1 к плитам в виде робота-манипулятора 5, упора (У) 6 с захватными органами 7, основания 8, дополнительного У 9, опор качения, а также арретирующего механизма 11. При этом в каждом прижиме смонтирова- ны дополнительные опоры качения. В процессе работы органы 7 прижимают Ш 1 к У 6, робот-манипулятор 5 переносит сменную часть Ш 1 в рабочую зону пресса и вводит ее в пазы прижимов. Механизм регулирования закрытой высоты опускает вниз У 6 до соприкосновения У 9 с нижней плитой, при этом происходит центрирование Ш 1. После касания Ш 1 верхней пли- ты органы раскрываются и Ш 1 прижимается к верхней плите прижимами. 1 з.п. ф-лы, 4 ил. i СЛ 19 jO 35 Ю ini 35 1Ч (риг. 2
| Автоматическое устройство для смены штампов на прессе | 1985 |
|
SU1297971A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
