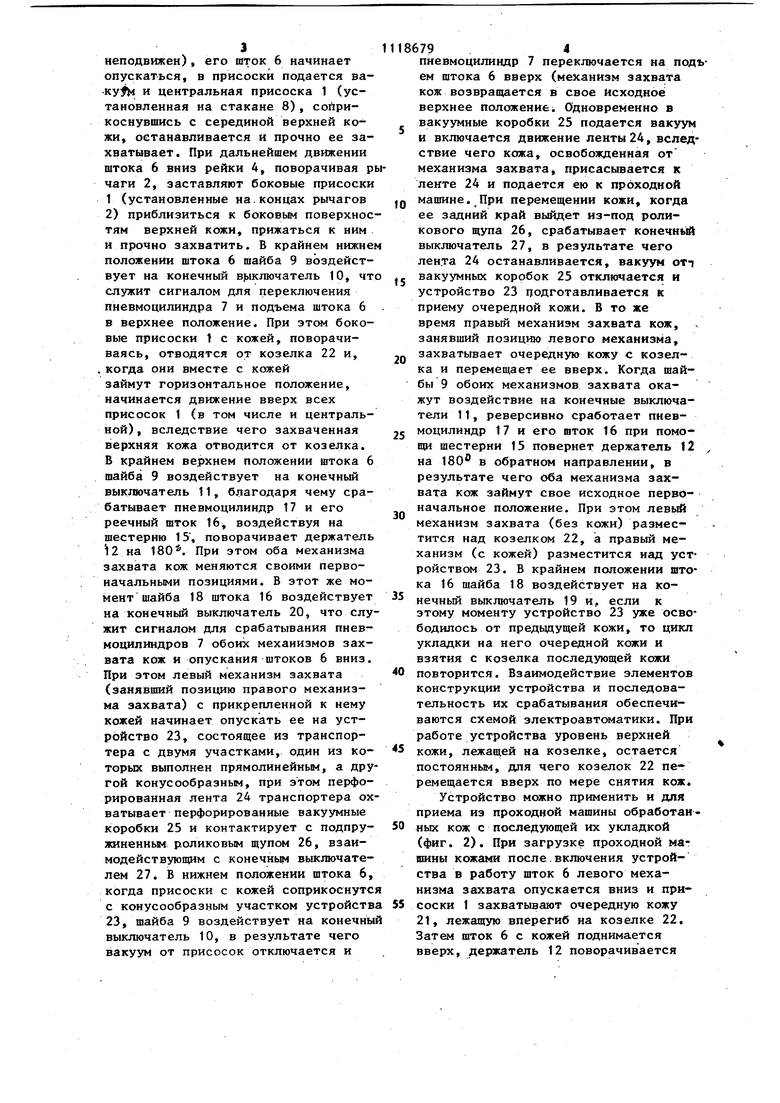
Изобретение относится к легкой промышленности, а конкретно к кожевенному производству, в частности к устройствам для загрузки кож.в проходные машины и агрегаты, выгруз ки обработанных кож и укладки их на козелок или площадку. Известно устройство для подачи к в проходную машину, содержащее вакуумный присос и качающийся ленточный конвейер, которое осуществляет загрузку проходного оборудования ко жами, лежащими на козелке вперегиб Недостатком указанного устройств является ограниченность его функций исключающая возможность использования устройства как для загрузки про ходного оборудования, так и для раз грузки его, что сужает эксплуатационные возможности устройства. Кроме того, устройство может обеспечить подачу в проходную машину только кож лежащих вперегиб на козелке, и не может быть использовано для пода в машины кож, лежащих на площадке врастил картой, а наличие холосто го хода вакуумного присоса снижает производительность устройства. Известно устройство для захвата изделий, содержащее держатель, вакуум-присоски, укрепленные на поворотных рычагах, несущих зубчатые сектора и зубчатые рейки, взаимодей ствующие с зубчатыми секторами, и выполненный в виде пневмоцилиндра со штоком 2J . Устройство обеспечивает захват изделий, однако не может быть использовано для захвата кож. Целью изобретения является расширение технологических возможностей устройства за счет использования его для загрузки в проходную ма шину кож, лежащих как врастил на площадке, так и вперегиб на-козелке а также для укладки обработанных ко врастил на площадку или вперегиб на козелок. Поставленная цель достигается тем, что устройство, содержащее дер жатель, вакуум-присоски, укрепленные на поворотных рычагах, несущих зубчатые колеса и зубчатые рейки, взаимодействующие с зубчатыми колерами, связанный с рейкой привод, ус тановленный на держателе и вьтолненный в виде пневмоцилиндра со што ком, имеет стакан, установленный на штоке пневмоцилиндра с возмож92ностью перемещения вдоль его оси, и дополнительную центральную вакуумприсоску, установленную на стакане и размещенную симметрично между вакуум-присосками поворотных рычагов, причем зубчатые рейки связаны с приводом посредством кронштейна, свободно установленного на штоке пневмоцилиндра. На фиг. 1 схематически изображено устройство; на фиг. 2 - устройство при подаче и приеме кож, применительно к проходной гладильной машине; на фиг. 3 - то же, применительно к проходному подошвенному катку. Устройство содержит два механизма захвата кож, выполненных в виде подпружиненных самоустанавливающихся вакуумных присосок 1, поворотных рычагов 2с шестернями 3, взаимодействующими с зубчатыми рейками 4, смонтированнь&1И на кронштейне 5, подвижно установленном на штоке 6 пневмоцилиндра 7, стакана 8, несущего оси повороТйых рычагов 2 и подвижно установленного на конце штока 6, шайбы 9, укрепленной на штоке 6 и взаимодействующей с конечным выключателем 10 и 11. Механизмы захвата кож установлены на концах держателя 12 симметрично относительно его поворотной оси 13, смонтированной на вертикальной стойке 14, На оси 13 закреплена шестерня 15, взаимодейстВ5т)щая с реечным штоком 16 пневмоцилиндра 17, установленного на вертикальной стойке 14. На штоке 16 закреплена шайба 18, взаимодействующая с конечным выключателем 19 и 20. Кожи 21 укладываются вперегиб на козелок 22, установленный по оси симметрии левого механизма захвата кож и имеющий возможность подниматься (или опускаться) по мере подачи (или приема) кож таким образом, что верхняя кожа всегда находится на одном уровне по отношению к полу цеха. Устройство работает следующим образом. В исходном положении штоки 6 пневмоцилиндров 7 обоих механизмов захвата кож подняты, все присоски 1 находятся в горизонтальной плоскости и их полости соединены с атмосферой. Козелок 22 с кожами устанавливается в рабочей позиции, после чего включается работа устройства. При этом срабатывает левый механизм захвата кож (правый механизм захвата
31
неподвижен), его шток 6 начинает опускаться, в присоски подается ваку Н и центральная присоска 1 (установленная на стакане 8), соприкоснувшись с серединой верхней кожи, останавливается и прочно ее захватывает. При дальнейшем движении штока 6 вниз рейки 4, поворачивая рычаги 2, заставляют боковые присоски 1 (установленные на.концах рычагов 2) приблизиться к боковым поверхностям верхней кожи, прижаться к ним и прочно захватить. В крайнем нижнем положении штока 6 шайба 9 воздействует на конечный выключатель 10, что служит сигналом для переключения пневмоцилиндра 7 и подъема штока 6 в верхнее положение. При этом боковые присоски t с кожей, поворачиваясь, отводятся от козелка 22 к, когда они вместе с кожей займут горизонтальное положение, начинается движение вверх всех присосок 1 (в том числе и центральной) , вследствие чего захваченная верхняя кожа отводится от козелка. В крайнем верхнем положении штока 6 шайба 9 воздействует на конечный выключатель 11, благодаря чему срабатывает пневмоцилиндр 17 и его реечный шток 16, воздействуя на шестерню 15, поворачивает держатель 2 на 180. При этом оба механизма ахвата кож меняются своими первоачальными позициями. В этот же моент шайба 18 штока 16 воздействует а конечный выключатель 20, что слуит сигналом для срабатывания пневоцилиндров 7 обоих механизмов захвата кож и опускания-штоков 6 вниз. ри этом левый механизм захвата (занявший позицию правого механиза захвата) с прикрепленной к нему кожей начинает опускать ее на устройство 23, состоящее из транспортера с двумя участками, один из которых выполнен прямолинейным, а другой конусообразным, при этом перфорированная лента 24 транспортера охватывает перфорированные вакуумные коробки 25 и контактирует с подпружиненным роликовым щупом 26, взаимодействующим с конечным выключателем 27. В нижнем положении штока 6, когда присоски с кожей соприкоснутся с конусообразным участком устройства 23, шайба 9 воздействует на конечный выключатель 10, в результате чего вакуум от присосок отключается и
186794
пневмоцилиндр 7 переключается на подъем штока 6 вверх (механизм захвата кож возвращается в свое Исходное верхнее положение; Одновременно в вакуумные коробки 25 подается вакуум и включается движение ленты 24, вследствие чего кожа, освобожденная от механизма захвата, присасывается к ленте 24 и подается ею к проходной
Q машине. При перемещении кожи, когда ее задний край выйдет из-под роликового щупа 26, срабатывает конечный выключатель 27, в результате чего лента 24 останавливается, вакуум отт
- вакуумных коробок 25 отключается и устройство 23 подготавливается к приему очередной кожи. В то же время правый механизм захвата кож, занявший позицию левого механизма,
Q захватывает очередную кожу с козелка и перемещает ее вверх. Когда шай бы 9 обоих механизмов захвата окажут воздействие на конечные выключатели 11, реверсивно сработает пнев5 моцилиндр 17 и его шток 16 при помощи шестерни 15 повернет держатель 12 на 180 в обратном направлении, в результате чего оба механизма захвата кож займут свое исходное первоначальное положение. При этом левь1Й механизм захвата (без кожи) разместится над козелком 22, а правый механизм (с кожей) разместится над устройством 23. В крайнем положении штока 16 шайба 18 воздействует на конечный выключатель 19 и, если к
этому моменту устройство 23 уже освободилось от предьздущей кожи, то цикл укладки на него очередной кожи и взятия с козелка последующей кожи
0 повторится. Взаимодействие элементов конструкции устройства и последовательность их срабатывания обеспечиваются схемой электроавтоматики. При работе устройства уровень верхней
5 кожи, лежащей на козелке, остается постоянным, для чего козелок 22 пет ремещается вверх по мере снятия кож. Устройство можно применить и для приема из проходной машины обработан0 ных кож с последующей их укладкой (фиг. 2). При загрузке проходной машины кожами после.включения устройства в работу шток 6 левого механизма захвата опускается вниз и при5 соски 1 захватывают очередную кожу 21, лежащую вперегиб на козелке 22. Затем шток 6 с кожей поднимается вверх, держатель 12 поворачивается
5.1
на 180 и штоки 6 обоих механизмов захвата опускаются вниз. Кожа укладывается на устройство 23, которое включается в работу, с козелка 22 снимается последующая кожа и держатель 12 вновь возвращается в исходное положение. При этом правый механизм захвата с прикрепленной к нему кожей нависает над устройством 23, а левый механизм (без кожи) - над козелком 22. Если к этому моменту кожа уже поступила на загрузочный транспортер 28 гладильной машины 29, а ее задний край вьшел из-под роликового щупа 26, то штоки 6 обоих механизмов захвата опускаются вниз . и последующая кожа укладывается на устройство 23, а очередная кожа захватывается с козелка 22, и цикл съёма кож с козелка и подачи их в проходную машину повторяется. Для более качественной подачи кож в проходную машину линейные скорости транспортеров устройства 23 и машины 29 синхронизированы.
Кожа по выходе из рабочих органов проходной машины поступает на работающее второе устройство 23, установленное со стороны выгрузки кож. Устройство 23 имеет механизм определения середины кожи известного типа, который включается, когда передний край кожи входит под роликовый щуп 26. При достижении серединой кожи верхней точки устройства 23 его транспортер останавливается, пе4 емещение кожи прекращается и от вакуумных коробок 25 (фиг. 1) отключается вакуум. В следующий момент времени при помощи штока 6 левый механизм захвата опускается на устройство 23, присасывает свободно лежащую на нем кожу и поднимает ее вверх, после чего держатель 12 поворачивается на 180 . К этому моменту очередная обработанная кожа, уже находится на устройстве 23 (чтобы это произошло, скорость транспортной ленты устройства 23, установленного со стороны выгрузки кож, значительно больше скорости перемещения кож в проходной машине). Оба механизма захвата вновь опускаются вниз и один из них укладывает очередную кожу на козелок 22, а другой берет последующую кожу, лежащую на устройстве 23. Затем механизмы захвата поднимаются., держатель 12 реверсируется на 180 и цикл приема и укладки обработанш.1х
86796
кож повторяется. Для обеспечения качественной укладки кож по мере их накопления козелок 22 опускается для того, чтобы поверхность верхней кожи 5 находилась всегда на одном уровне по отношению к уровню присосок.
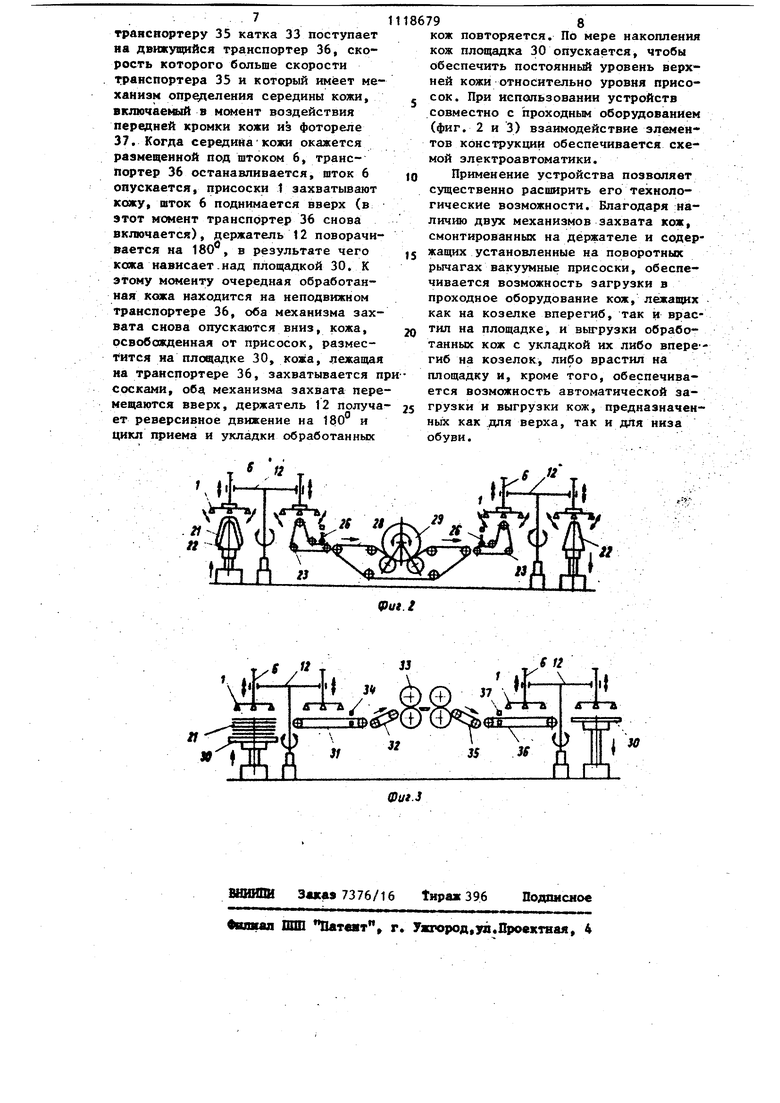
Устройство может быть использовано и в том случае, если необходимо осуществить загрузку в машину кож, ле0 жащих врастил на площадке, и уложить их после обработки также врастил на площадку. Примером такого комплексного применения устройства может служить схема его установки совместно,
5 например, с проходньм подошвенньм катком (фиг. 3). Для загрузки катка кожи 21, уложенные стопкой на подвижной в вертикальном направлении площадке 30, устанавливаются по оси
0 симметрии левого механизма захвата кож. При опускании штока 6 вниз присоски 1 соприкасаются с горизонтальной поверхностью верхней кожи, прижимаются к ней и захватьшают, на5 ходясь также в горизонтальной плоскости, поскольку в этом случае отсутствует перемещение кронштейна 5 « относительно стакана 8 (фиг. 1). В следующий момент шток 6 с меха0 низмом захвата и прикрепленной к
нему кожей поднимается, держатель 12 поворачивается на 180° и штоки 6 обоих механизмов захвата начинают опускаться вниз. Затем кожа, прикрепленная к одному из механизмов за вата, укладывается на транспортер 31 и освобождается от присосок, а очередная кожа, лежащая на площадке 30, захватывается присосками другого
0 механизма захвата, штоки 6 поднимаются (при этом транспортер 31 вк4ючается и начинает перемещать кожу к загрузочному транспортеру 32 катка 33), держатель 12 реверсируется, вследствие чего очередная кожа нависает над транспортером 31. К этому моменту задний край кожи выходит из зоны действия фотореле 34, установленного между лентами транспортера 31, и его движение прекращается, включается перемещение штоков 6 вниз, кожа укладывается на ленты транспортера 31 и цикл подачи кож в проходную машину повторяется. При выгрузке обработанных кож из проходного катка и их укладке на площадку взаимодействие элементов конструкции устройства следующее. Обработанная кожа по выгрузочному 7 траясвортеру 35 катка 33 поступает на движущийся транспортер 36, скорость которого больше скорости транспортера 35 и который имеет ме ханизм опр еления середины кожи, включае в 1й в мсмент воздействия передней кромки кожи из фотореле 37. Когда серединакожи окажется размещенной под штоком 6, транспортер 36 останавливается, шток 6 опускается, присоски 1 захватывают коку, шток 6 поднимается вверх (в этот момент транспортер 36 снова включается), держатель 12 поворачи вается на 180 , в результате чего кожа нависает.над площадкой 30. К этому моменту очередная обработанная кожа находится на неподвижном транспортере 36, оба механизма зах вата снова опускаются вниз, кожа, освобожденная от присосок, разместится на площадке 30, кожа, лежаща на транспортере 36, захватывается сосками, оба механизма захвата пер мещаются вверх, держатель 12 получ ет реверсивное движение на 180 и цикл приема и укладки обработанн№с
S М
. 98 кож повторяется. По мере накопления кож площадка 30 опускается, чтобы обеспечить постоянный уровень верхней кожи относительно уровня присосок. При использовании устройств совместно с проходным оборудованием (фиг. 2 и 3} взаимодействие элемен тов конструкции обеспечивается схемой электроавтоматики. Применение устройства позволяет существенно расширить его технологические возможности. Благодаря наличию двух механизмов захвата кож, смонтированных на держателе и содержащих установленные на поворотных рычагах вакуумные присоски, обеспечивается возможность загрузки в проходное оборудование кож, лежащих как на козелке вперегиб, так и врастил на площадке, и выгрузки обработанных кож с укладкой их либо вперегиб на козелок, либо врастил на площадку и, кроме того, обеспечивается возможность автоматической загрузки и выгрузки кож, предназначенных как .для верха, так и для низа обуви.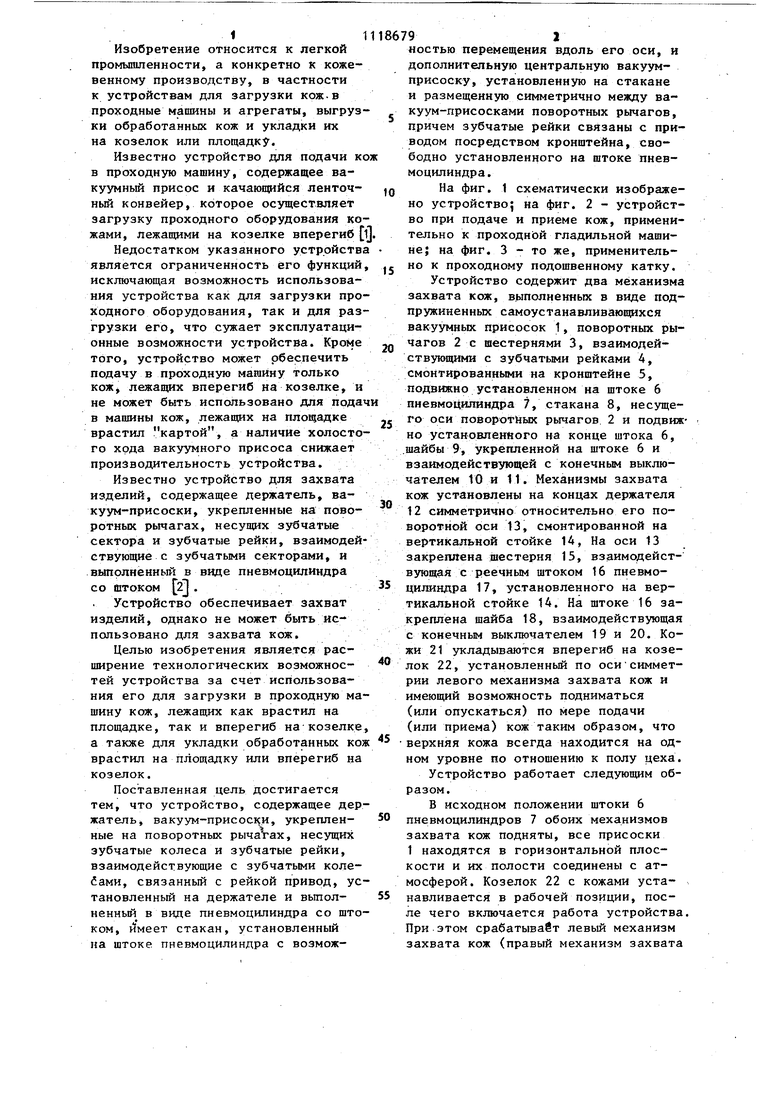

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для укладки кож на козелок | 1984 |
|
SU1227674A2 |
| Устройство для подачи кож к обрабатывающему агрегату | 1985 |
|
SU1326520A1 |
| Устройство для захвата изделий | 1987 |
|
SU1418251A1 |
| Устройство для загрузки и разгрузки листового материала | 1984 |
|
SU1194882A1 |
| Устройство для транспортировки листов гибкого материала | 1982 |
|
SU1089125A1 |
| Устройство для укладки кож на козелок | 1986 |
|
SU1377298A1 |
| Устройство для укладки упаковок в тару | 1985 |
|
SU1504166A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ЗАГРУЗКИ И ВЫГРУЗКИ ЭЛАСТИЧНЫХ МАТЕРИАЛОВ | 1991 |
|
RU2015097C1 |
| Устройство для сортировки и укладки в стопу полосового материала | 1983 |
|
SU1199370A1 |
| Устройство для установки на печатные платы радиоэлементов, преимущественно поверхностного монтажа | 1988 |
|
SU1777256A1 |
УСТРОЙСТВО ДЛЯ ЗАХВАТА ИЗДЕЛИЙ, содержащее держатель, вакуумприсоски, укрепленные на поворотных .рычагах, несущих зубчатые колеса и зубчатые рейки, взаимодействующие с зубчатыми колесами, связанный с рейками привод, установленный на держателе и выполненный в виде пневмоцилиндра со штоком, отличающееся тем, что, с целью расширения технологических возможностей, оно имеет стакан, установленный на штоке пневмрцилиндра с возможностью перемещения вдоль его оси, и дополнительную центральную вакуум-присоску, установленную на стакане и размещенную симметрично междУ вакуум-присосками поворотных рычагов, причем зубчатые рейки -связаны с приводом посредством кронштейна, (Л свободно установленного на штоке пневмоцилиндра. 00 Од ;о
f ,tf
Ff-ii /
Д a Д fai A У
S fi
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Бурмистров А.Г | |||
| и др | |||
| Оборудование предприятий по производству кожи и меха | |||
| М., - Легкая и пищевая промьшшенность, 1981, с | |||
| Гидравлический подъемник | 1922 |
|
SU389A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Вакуумное грузозахватное устройства | 1974 |
|
SU484159A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
