j 28 iJ.
-Г I I
28
ОС
а 4
ОС ее
4
Ц)иг.1
1
Изобретение относится к литейному производству и может быть использовано в энергетическом машиностроении для извлечения каркасов из экономай- зерных труб после литья.
Цель изобретения - повьшение производительности и возможность автоматизации процесса.
На фиг. 1 показана установка, вид сбоку; на фиг. 2 - то же, вид сверху; на фиг. 3 - разрез А-А на фиг.2; на фиг. 4 - вид Б на фиг. 1; на фиг. 5 - вид В на фиг. 1; на фиг.6 7 разрез Г-Г на фиг. 5; на фиг. разрез Д-Д на фиг. 1; на фиг. 8 - вид Е на фиг. 1; на фиг. 9 - вид Ж на фиг. 1.
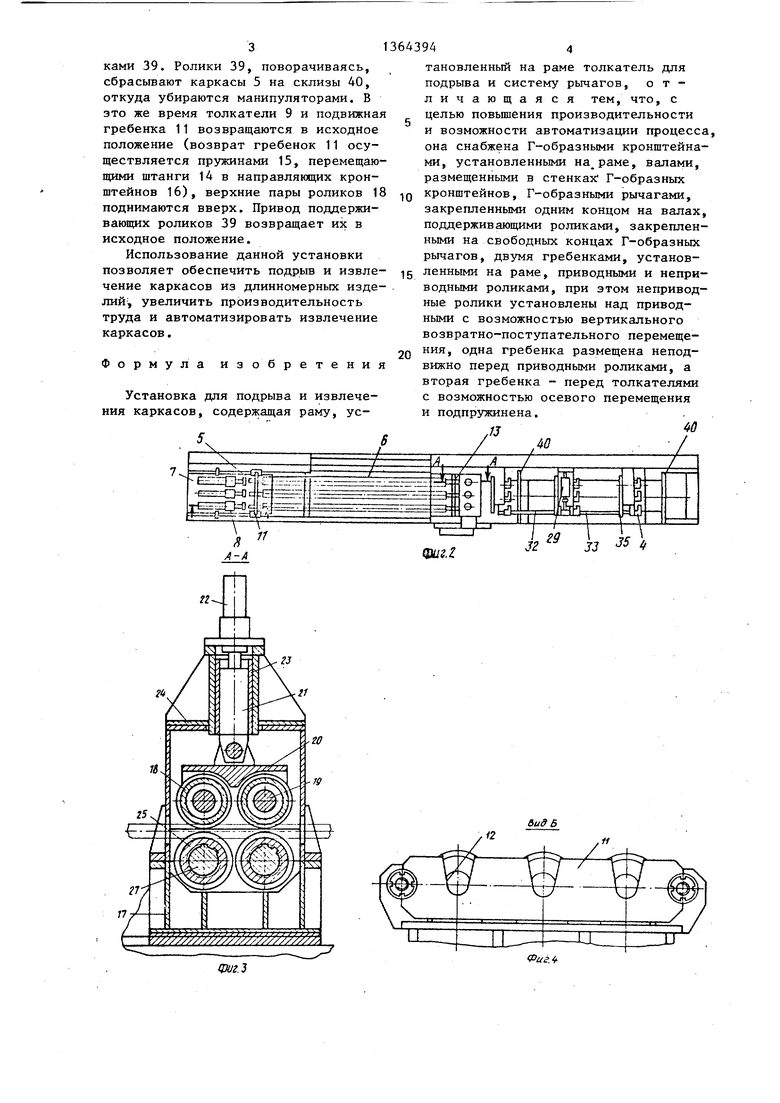
Установка содержит раму 1 со смонтированными на ней механизмом 2 подрыва, механизмом 3 извлечения и механизмом 4 удаления каркасов 5 экономайзерных труб 6. Механизм 2 подрьша содержит установленную, на раме 1 каретку 7 с расположенными на ней тремя силовьми гидроцилиндрами 8, на штоках которых жестко закреплены толкатели 9, имеющие выемки 10. Механизм 2 снабжен подвижной гребенкой 1 1 с пазами 12 для ориентации каркасов 5 и неподвижной .гребенкой
13,служащей упором для экономайзерных труб 6. Подвижная гребенка 11 соединена с направляющими штангами
14,несущими пружины 15 и установленными с возможностью возвратно-поступательного перемещения в кронштейнах 16, жестко закрепленных на каретке 7 .
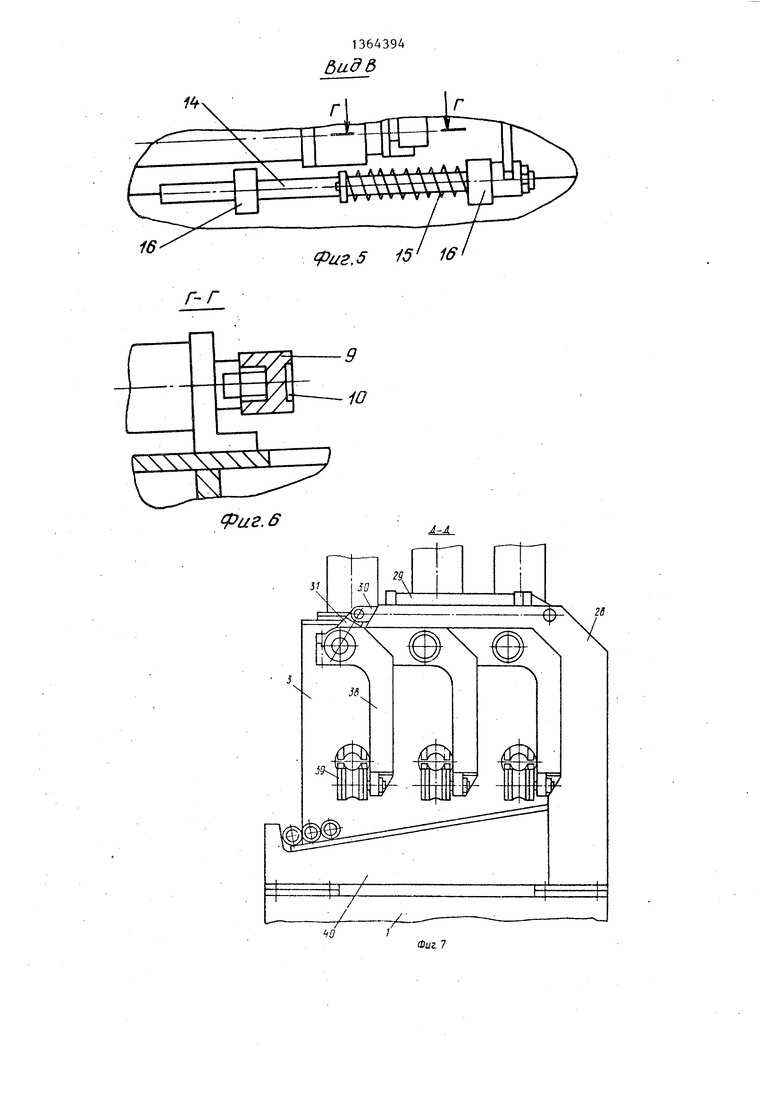
Механизм 3 извлечения представляет собой сварной корпус 17, в котором расположены 6 пар подающих роликов. Верхние три пары роликов 18, служащие для поджима каркасов 5, установлены свободно на осях 19, жестко закрепленных в корпусах 20, в свою очередь, шарнирно соединенных с гильзами 21, связанньми жестко со штоками гидроцилиндров 22. Гильзы 21 установлены с возможностью продольного перемещения в направляющих 23 корпуса 24. Нижние три пары подающих роликов 25 получают вращение от привода 26 через шлицевые валы 27.
.Механизм 4 удаления каркасов содержит ряд установленных на раме 1 парами Г-образных кронштейнов 28. В верхней части средней пары Г-образных кронштейнов смонтирован пневмоцилиндр
13
10
3643942
29, на штоке 30 которого шарнирно закреплен Г-образный рычаг 31, связанный с поворотными валами 32 и 33, установленными в стенках Г-образных кронштейнов. На поворотных валах 32 и 33 шарнирно посредством серег 34 закреплены тяги 35, которые посредством серег 36 шарнирно связаны с осями 37, установленными также в стенках Г-образных кронштейнов параллельно валам 32 и 33. На осях 37 и валах 32 и 33 смонтированы поворотные рычаги 38, несущие ролики 39. На раме 1 также установлены склизы 40 и упор 41, предназначенный для ограничения перемещения каркасов 5.
Установка работает в автоматическом режиме следующим образом.
Исходным положением является момент, когда толкатели 9 и подвижная гребенка 11 находятся в крайнем ле15
20
0
5
0
5 18 подающих подняты, ролики 39 поддерживающие опущены.
После загрузки экономайзерных труб 6 манипулятором в пазы 12 гребенок 11 и 13 механизма подрыва рабочая жидкость из гидроагрегата подается в поршневые полости силовых гидроцилиндров 8, при этом толкатели 9, захватив своими выемками 10 концы каркаса 5, перемещают изделие вместе с подвижной гребенкой 11 до упора трубы своим фланцем в гребенку 13, дальнейшее перемещение толкателей 9 производит подрыв каркасов 5. Перемещаясь каркасы 5 своим концом попадают на нижние приводные пары роликов 25 механизма 3 извлечения. При подаче рабочей жидкости в поршневые полости гидроцилиндров 22 происходит продольное перемещение гильз 21 в направляющих 23 корпуса 24 вместе с верхними парами роликов 18. Происходит зажим каркасов 5, после чего включается привод 26 и через шлицевые валы 27 . вращение передается нижним приводным роликам 25. Происходит извлече- ние каркасов 5 с небольшим усилием. Каркасы 5 при извлечении опираются на ролики 39 поддерживающие. Извлечение происходит до упора 41, затем включается пневмоцилиндр 29 и через Г-образный рычаг 31 поворачивает валы 32 и 33, тяга 35 совершает возвратно-поступательное перемещение и поворачивает рычаги 38 вместе с роли5
0
5
гг.
ги
21
,to
да/г.5
вид в
Фиг.
16
Фиг,5 i5 16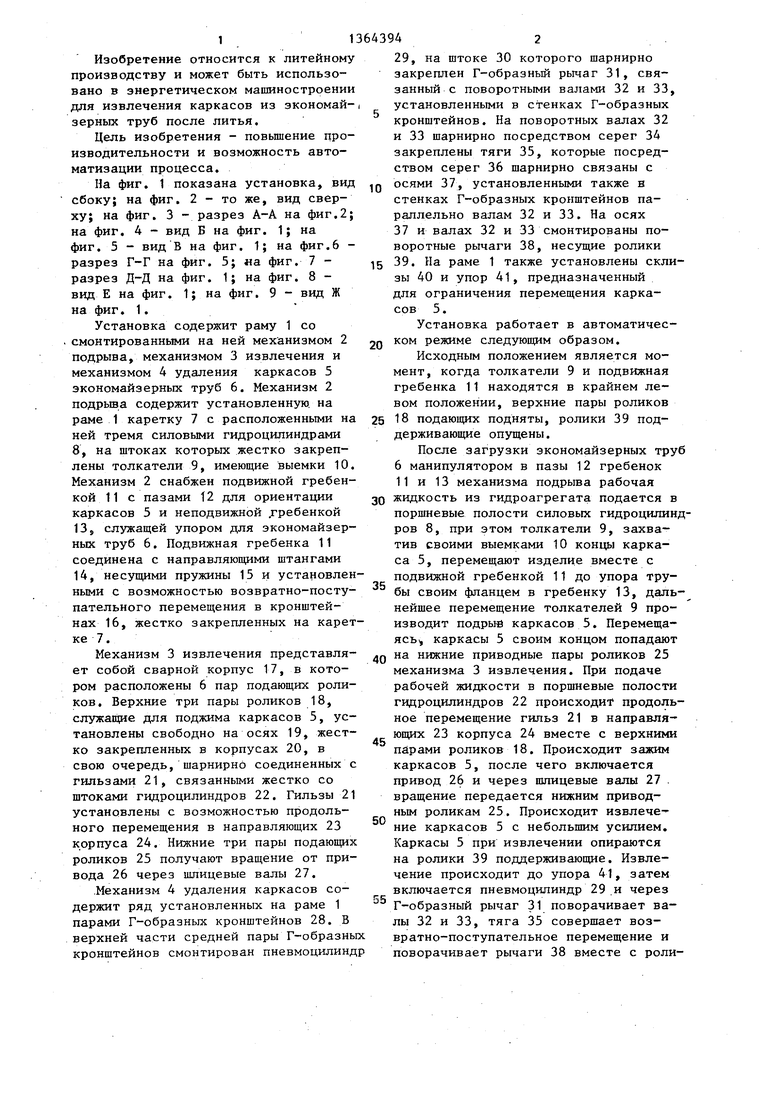
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ТЕПЛОИЗОЛЯЦИИ ТРУБ | 1992 |
|
RU2056579C1 |
| Станок для загибки и отрезки концов трубных спиралей | 1989 |
|
SU1648592A1 |
| Укладчик плит | 1977 |
|
SU753974A2 |
| Поточная линия формирования колесных пар подвижного состава | 1972 |
|
SU490701A1 |
| Устройство рубки движущейся ленты древесного шпона с ножом и узлом его натяжения, включая механизм вертикального перемещения прижимного вала с натяжителем цепи | 2021 |
|
RU2807977C2 |
| МЕДИЦИНСКИЙ СТОЛ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2212216C1 |
| Автомат для предмонтажной обработки электрических шнуров | 1988 |
|
SU1642542A1 |
| Папиросонабивная машина | 1929 |
|
SU21014A1 |
| СПОСОБ УМЕНЬШЕНИЯ УСИЛИЯ ОТДАЧИ ОГНЕСТРЕЛЬНОГО ОРУЖИЯ И ПУШКА С ОТКИДНЫМ ПАТРОННИКОМ ДЛЯ ЕГО РЕАЛИЗАЦИИ. ВАРИАНТЫ | 2019 |
|
RU2736305C1 |
| Устройство для сборки контактных групп | 1981 |
|
SU991629A1 |
Изобретение относится к литейному производству и может быть использовано в энергетическом машиностроении для извлечения каркасов из экономайзерных труб. Цель изобретения - повышение производительности и автоматизация процесса. Устройство содержит механизм 2 подрьша, механизм 3 извлечения и механизм удаления каркасов. Механизм 2 подрьгеа состоит из гидроцилиндров, подвижной подпружиненной гребенки и неподвижной гре- бенки. Механизм 3 извлечения каркасов содержит шесть пар роликов, три верхних регулируются по высоте, нижние ролики выполнены приводными. Механизм 4 удаления каркасов состоит из кронштейнов 28 и установленных на них поворотных рычагов с опорными роликами. 9 ил. V.
дидЖ
QudE
Фиг. 8
| Устройство для подрыва, фиксации и извлечения отливок из постоянных литейных форм | 1979 |
|
SU772711A1 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
