П 8 9 S 7 J
/ / / / / /
/ / / /
Изобретение относится к приборостроению, в частности может быть использовано для измерения массы грузов и материалов, перемещаемых транспортными средствами с упруго подвешенной платформой, преимущественно внутризаводскими, на металлургических заводах и в других отраслях промышленности.
Цель изобретения - повышение точности взвешивания и расширение диапазона взвешивания.
На фиг. 1 представлена функциональная схема устройства; на фиг.2 - механизм ориентирования рычага; на фиг. 3 - то же, вид сверху.
Платформа 1 транспортного средства (показана схематично) опирает
5
укреплен ролик 21, ось которого расположена в одной плоскости с осью плеча 7 рычага 3 и перпендикулярна к ней. К днищу 23 платформы 1 транспортного средства прикреплены две направляющие 22. Опора 12 рычага 3 установлена на роликах 24 и снабжена электромагнитным фиксатором 25, подключенным к пульту 20 управления.
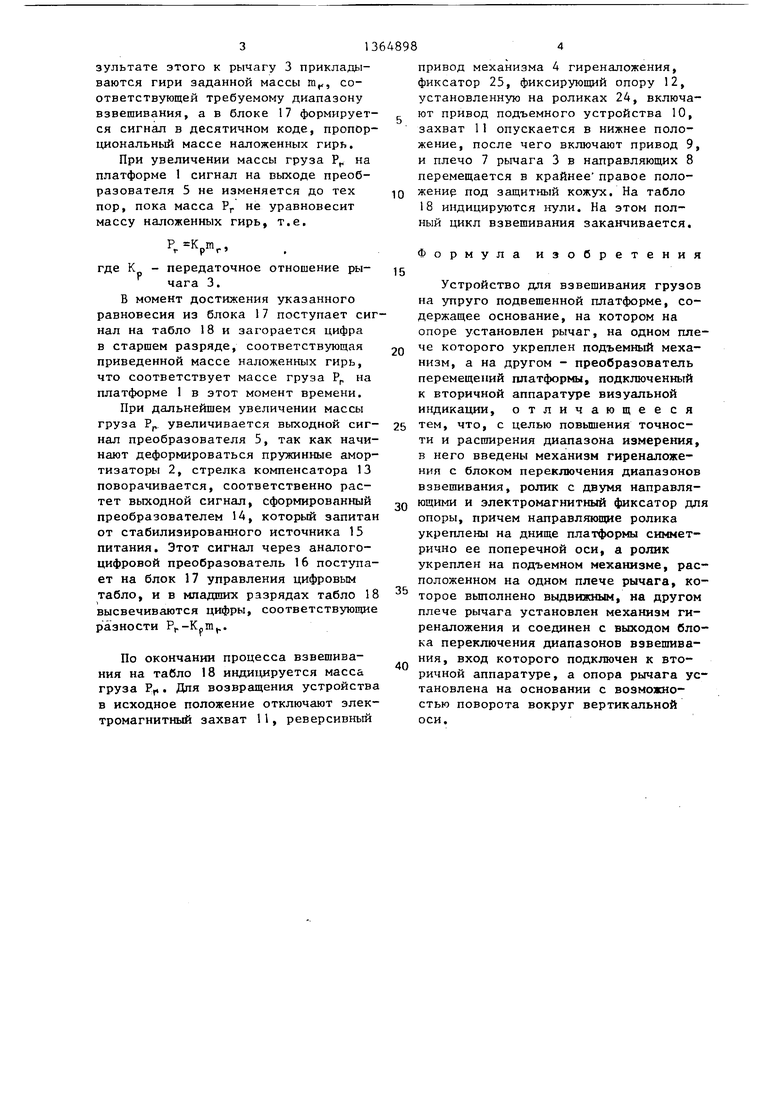
Направляющие 22 (фиг. 3) прикреплены к днищу платформы 23 симметрично относительно поперечной оси платформы 1, причем расстояние между пластинами должно быть больше диаметра ролика 21.
Устройство работает следующим образом.
Транспортное средство, например 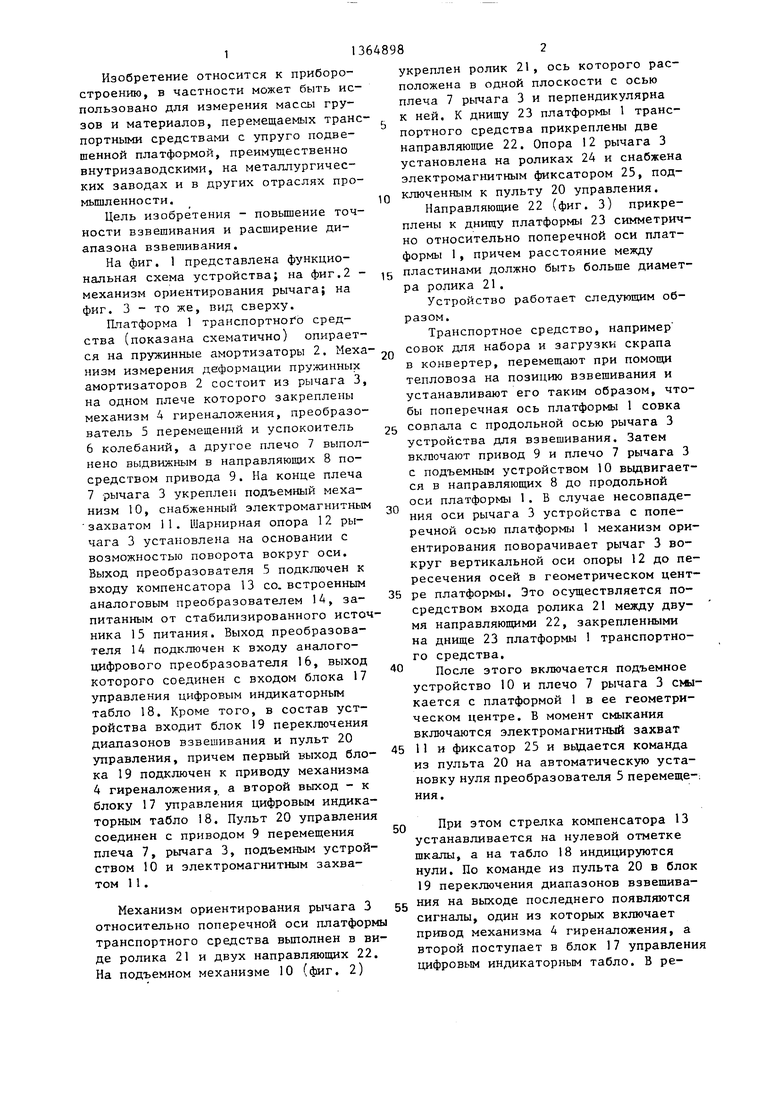
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для взвешивания | 1987 |
|
SU1493880A1 |
| Прецизионные большегрузные стационарные весы | 1978 |
|
SU748139A1 |
| Весоизмерительное устройство | 1984 |
|
SU1254305A1 |
| Автоматическое весовое устройство | 1981 |
|
SU1064150A1 |
| Устройство для определения моментного веса изделий | 1986 |
|
SU1339406A1 |
| Взвешивающее устройство для грузов на упруго подвешенной платформе | 1984 |
|
SU1191748A1 |
| Весоизмерительное устройство | 1980 |
|
SU870960A1 |
| Механизм гиреналожения большегрузных весов | 1979 |
|
SU859823A1 |
| Весы с устройством поверки | 1981 |
|
SU1291826A1 |
| Устройство для измерения статического момента массы лопаток турбомашин | 1988 |
|
SU1608445A1 |
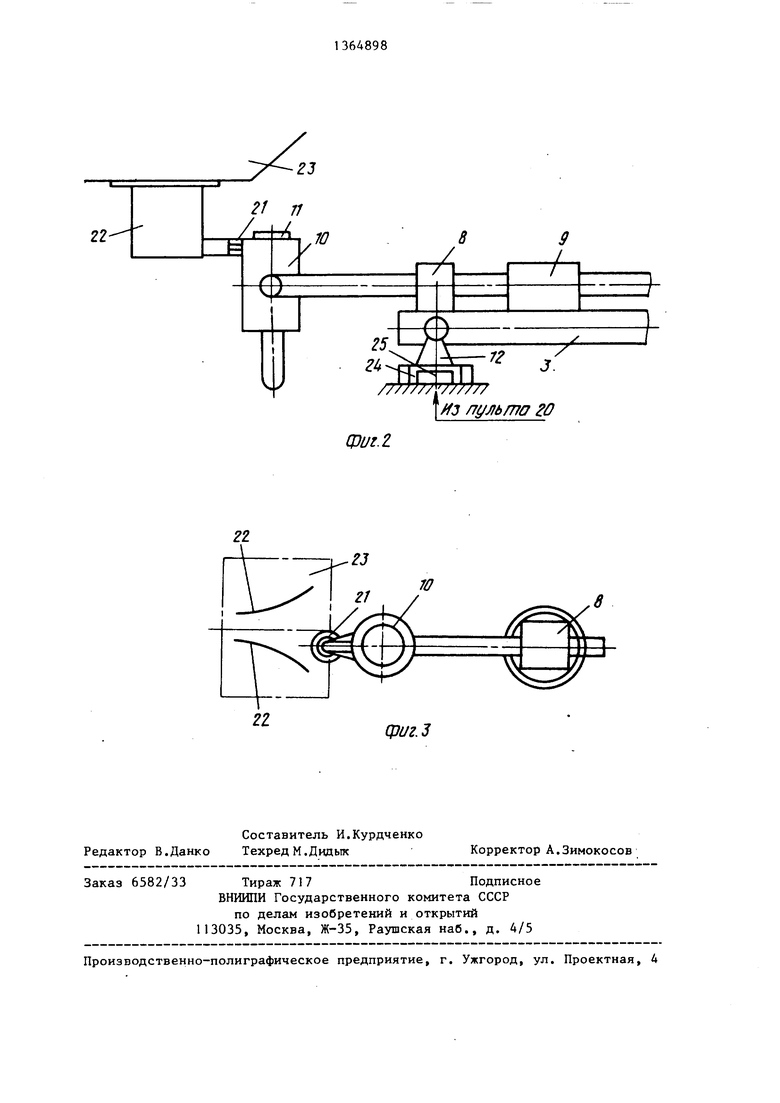
Изобретение м.б. использовано для измерения массы грузов и материалов, перемещаемых транспортньми средствами с упруго подвешенной платформой. Цель изобретения - повышение точности взвешивания и расширение диапазона взвешивания. По команде пульта 20 в блок 19 переключения диапазонов взвешивания на выходе последнего появляются сигналы, один из которых включает механизм 4 гиреналоже- ния, а другой поступает в блок 17 управления индикаторным табло. К рычагу 3 прикладьшаются гири заданной массы, а в блоке 17 управления формируется сигнал, пропорциональный массе наложенных гирь. При увеличении массы груза увеличивается выходной сигнал преобразователя 5, т.к. деформируются амортизаторы 2, стрелка компенсатора 13 поворачивается, растет выходной сигнал, сформированный преобразователем 14, который через аналого-цифровой преобразователь 16 поступает на блок 17 управления табло 18, ив младших разрядах табло 18 высвечиваются цифры, соответствующие массе груза. 3 ил. i СЛ
ся на пружинные амортизаторы 2. Меха- JQ совок для набора и загрузки скрапа
низм измерения деформации пружинных амортизаторов 2 состоит из рычага 3, на одном плече которого закреплены механизм 4 гиреналожения, преобразователь 5 перемещений и успокоитель
6колебаний, а другое плечо 7 выполнено выдвижным в направляюш 1х 8 посредством привода 9. На конце плеча
7рычага 3 укреплен подъемный механизм 10, снабженный электромагнитным
захватом 11. Шарнирная опора 12 рычага 3 установлена на основании с возможностью поворота вокруг оси. Выход преобразователя 5 подключен к входу компенсатора 13 со. встроенным аналоговым преобразователем 14, за- питанным от стабилизированного источника 15 питания. Выход преобразователя 14 подключен к входу аналого- цифрового преобразователя 16, выход которого соединен с входом блока 17 управления цифровым индикаторным табло 18. Кроме того, в состав устройства входит блок 19 переключения диапазонов взвешивания и пульт 20 управления, причем первый выход блока 19 подключен к приводу механизма 4 гиреналожения, а второй выход - к блоку 17 управления цифровым индикаторным табло 18. Пульт 20 управления соединен с приводом 9 перемещения
7, рычага 3, подъемным устрой- и электромагнитным захваплечаством 10 том 11.
25
30
35
40
45
50
в конвертер, перемещают при помощи тепловоза на позицию взвешивания и устанавливают его таким образом, чт бы поперечная ось платформы 1 совка совпала с продольной осью рычага 3 устройства для взвешивания. Затем включают привод 9 и плечо 7 рычага с подъемным устройством 10 вьщвигае ся в направляющих 8 до продольной оси платформы 1. В случае несовпаде ния оси рычага 3 устройства с поперечной осью платформы 1 механизм ор ентирования поворачивает рычаг 3 во круг вертикальной оси опоры 12 до п ресечения осей в геометрическом цен ре платформы. Это осуществляется по средством входа ролика 21 между дву мя направляющими 22, закрепленными на днище 23 платформы 1 транспортно го средства.
После этого включается подъемное устройство 10 и плечо 7 рычага 3 см кается с платформой 1 в ее геометри ческом центре. Б момент смыкания включаются электромагнитный захват 11 и фиксатор 25 и вь1дается команда из пульта 20 на автоматическую уста новку нуля преобразователя 5 перемеще ния.
При этом стрелка компенсатора 13 устанавливается на нулевой отметке шкалы, а на табло 18 индицируются нули. По команде из пульта 20 в бло 19 переключения диапазонов взвешива ния на выходе последнего появляются сигналы, один из которых включает привод механизма 4 гиреналожения, а второй поступает в блок 17 управлен цифровым индикаторным табло. В реМеханизм ориентирования рычага 3 относительно поперечной оси платформы транспортного средства выполнен в виде ролика 21 и двух направляющих 22. На подъемном механизме 10 (фиг. 2)
5
0
5
0
5
0
5
в конвертер, перемещают при помощи тепловоза на позицию взвешивания и устанавливают его таким образом, чтобы поперечная ось платформы 1 совка совпала с продольной осью рычага 3 устройства для взвешивания. Затем включают привод 9 и плечо 7 рычага 3 с подъемным устройством 10 вьщвигает- ся в направляющих 8 до продольной оси платформы 1. В случае несовпадения оси рычага 3 устройства с поперечной осью платформы 1 механизм ориентирования поворачивает рычаг 3 вокруг вертикальной оси опоры 12 до пересечения осей в геометрическом центре платформы. Это осуществляется посредством входа ролика 21 между двумя направляющими 22, закрепленными на днище 23 платформы 1 транспортного средства.
После этого включается подъемное устройство 10 и плечо 7 рычага 3 смыкается с платформой 1 в ее геометрическом центре. Б момент смыкания включаются электромагнитный захват 11 и фиксатор 25 и вь1дается команда из пульта 20 на автоматическую установку нуля преобразователя 5 перемеще-; ния.
При этом стрелка компенсатора 13 устанавливается на нулевой отметке шкалы, а на табло 18 индицируются нули. По команде из пульта 20 в блок 19 переключения диапазонов взвешивания на выходе последнего появляются сигналы, один из которых включает привод механизма 4 гиреналожения, а второй поступает в блок 17 управления цифровым индикаторным табло. В ре31364898
зультате этого к рычагу 3 прикладываются гири заданной массы т, соответствующей требуемому диапазону взвешивания, а в блоке 17 формируется сигнал в десятичном коде, пропорциональный массе наложенных гирь.
При увеличении массы груза Р на платформе 1 сигнал на выходе преобразователя 5 не изменяется до тех пор, пока масса Р не уравновесит массу наложенных гирь, т.е.
P.Vr
где К - передаточное отношение рычага 3.
В момент достижения указанного равновесия из блока 17 поступает сигнал на табло 18 и загорается цифра в старшем разряде, соответствующая приведенной массе наложенных гирь, что соответствует массе груза Рр на платформе 1 в этот момент времени.
При дальнейшем увеличении массы груза Рр, увеличивается выходной сигнал преобразователя 5, так как начинают деформироваться пружинные амортизаторы 2, стрелка компенсатора 13 поворачивается, соответственно растет выходной сигнал, сформированный преобразователем 14, который запитан от стабилизированного источника 15 питания. Этот сигнал через аналого- цифровой преобразователь 16 поступает на блок 17 управления цифровым табло, и в младших разрядах табло 18 высвечиваются цифры, соответствующие разности ,,.
По окончании процесса взвешивания на табло 18 индицируется масса груза Р. Для возвращения устройства в исходное положение отключают электромагнитный захват 11, реверсивньш
0
привод механизма 4 гиреналожения, фиксатор 25, фиксируюш 1Й опору 12, установленную на роликах 24, включают привод подъемного устройства 10, захват 11 опускается в нижнее положение, после чего включают привод 9, и плечо 7 рычага 3 в направляющих 8 перемещается в крайнее правое поло- женир под защитный кожух. На табло 1В индицируются нули. На этом полный цикл взвешивания заканчивается.
Формула изобретения
15
0
5
Устройство для взвешивания грузов на упруго подвешенной платформе, содержащее основание, на котором на опоре установлен рычаг, на одном плече которого укреплен подъемный механизм, а на другом - преобразователь перемещений платформы, подключенный к вторичной аппаратуре визуальной индикации, отличающееся тем, что, с целью повышения точности и расширения диапазона измерения, в него введены механизм гиреналожения с блоком переключения диапазонов взвешивания, ролик с двумя направля- Q ющими и электромагнитный фиксатор для опоры, причем направляющие ролика укреплены на днище платформы симметрично ее поперечной оси, а ролик укреплен на подъемном механизме, расположенном на одном плече рычага, которое вьтолнено выдвижным, на другом плече рычага установлен механизм гиреналожения и соединен с выходом блока переключения диапазонов взвешивания, вход которого подключен к вторичной аппаратуре, а опора рычага установлена на основании с возможностью поворота вокруг вертикальной оси.
5
0
гз
QJUf.Z
21
в
фиг.З
| 0 |
|
SU287345A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Взвешивающее устройство для грузов на упруго подвешенной платформе | 1984 |
|
SU1191748A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
