(Л
00
а
00
to ел
Фаа-.У
Изобретение относится к подъемно- транспортному оборудованию, в частности к устройствам для подъема и транспортирования листового металлопроката, и может быть использовано в машиностроительной, судостроительной и других отраслях народного хозяйства.
Цель изобретения - повьшение надежности в эксплуатации.
На фиг. 1 подъемно-транспортное средство общий вид; на фиг. 2 - разрез А-А на фиг. 1, грузозахватный элемент взаимодействует с горизонтальным участком груза; на фиг. 3 - то же, с наклонным участком груза; на фиг. 4 - разрез Б-Б на фиг. 1, на фиг. 5 - использование подъемно- транспортного средства для подъема криволинейной балки.
Устройство (фиг. 1) содержит балку 1, подъемную траверсу 2, механизм 3 подъема и инерцегасители 4. На траверсе 2 установлены грузозахватные механизмы 5, расположенные на траверсе 2, например, в несколько рядов. Каждый грузозахватньй механизм 5 включает в себя грузозахватный элемент, например электромагнит 6 (фиг. 2),. который посредством промежуточного корпуса 7 подвешен к цилиндрическому игтоку 8, Электромагнит 6 подвешен к корпусу 7 с возможностью самоустановочного поворота на сферической поверхности 9 и зафиксирован от поворота вокруг вертикальной оси (фиг. 3). Корпус 7 установле на штоке 8 с возможностью поворота
0
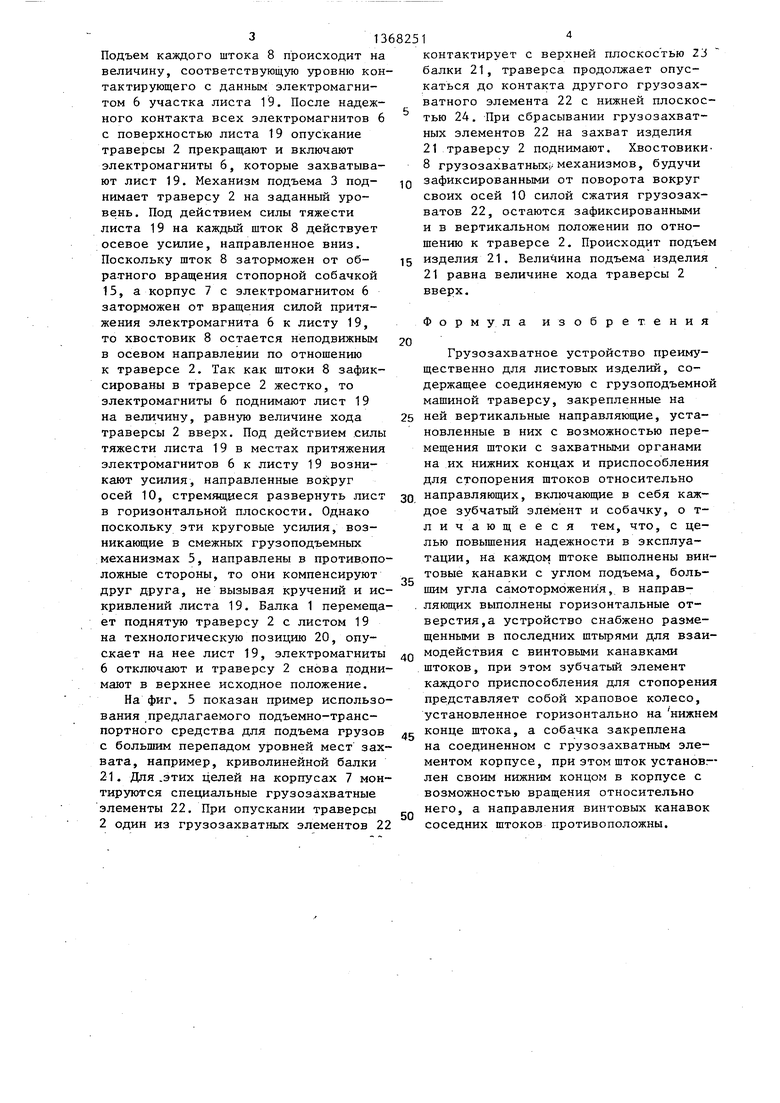
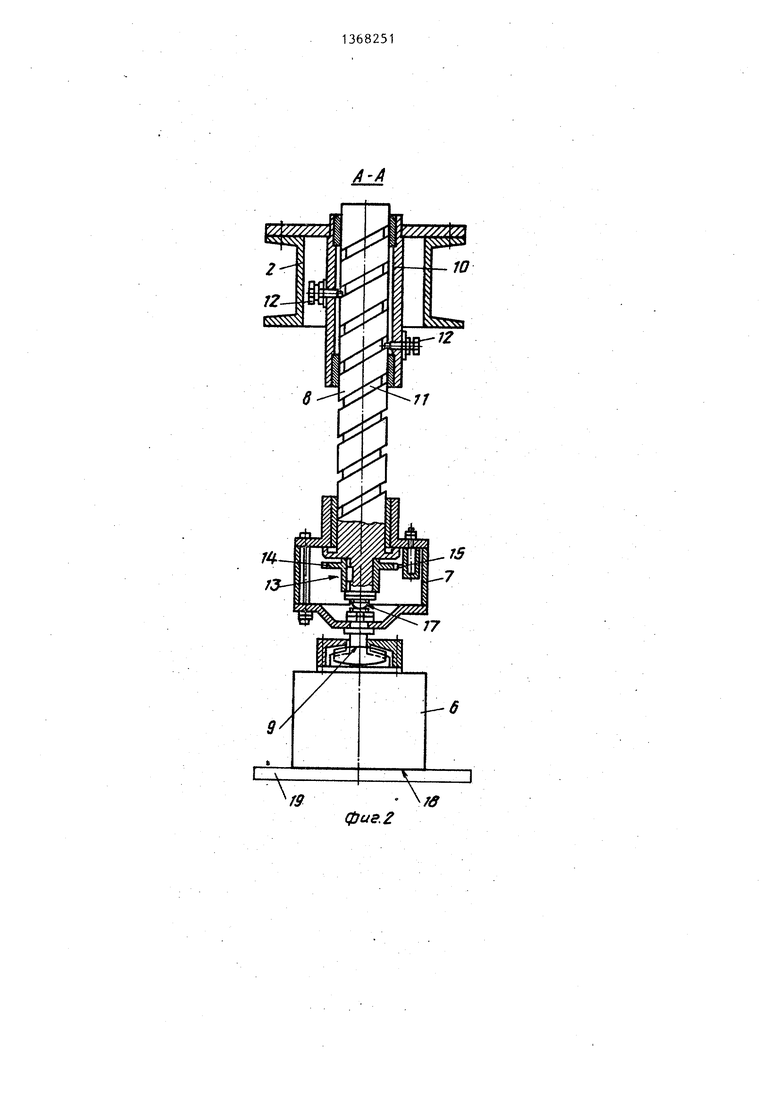
и смонтированной на корпусе 7, взаимодействующей с колесом 14 и подпружиненной к нему стопорной собачкой 15. Опорное острие 16 собачки 15 направлено попутно направлению винтовой канавки 11 штока 8, связанного с данной собачкой 15, т.е. направление собачки 15 и зубьев храпового колеса 14 в каждом грузозахватном механизме 5 обеспечивает обгонное действие устройства 13 в направлении, попутном направлению винтовой канавки 11, и стопорное действие устройст- 5 ва 13 в направлении, встречном направлению винтовой канавки 11. Направления винтовых канавок 11 смежных грузозахватных механизмов 5 противоположны. Нижний торец 17 каждого штока 8 выполнен сферическим и упирается в корпус 7. Штоки 8 выставлены на траверсе 2 таким образом, что при крайних нижних-положениях электромагнитов 6 их рабочие плоскости 18 смещены в вертикальном направлении относительно цруг друга на небольшие величины.
Подъемно-транспортное средство работает следующим образом.
При опускании траверсы 2 на лист 19 рабочие плоскости 18 электромагнитов 6 контактируют с листом 19, самовыставляясь по углу местной кривизны листа 19 посредством поворотов на сферических плоскостях 9 (фиг. 3). Поскольку после контакта электромагнита 6 с листом 19 опускание траверсы 2 продолжается, то на торец 17 штока 8 начинает действовать уси0
5
0
5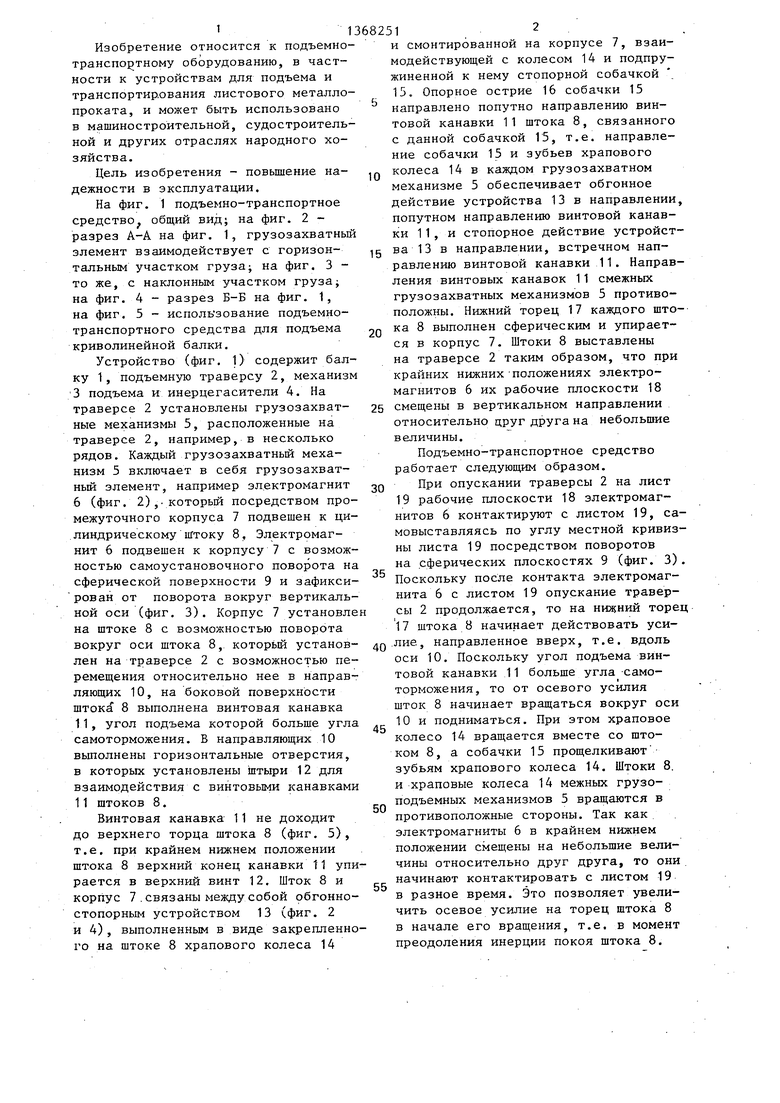
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузовая тележка | 1983 |
|
SU1181979A1 |
| Грузозахватное устройство | 1990 |
|
SU1735195A1 |
| Грузозахватное устройство | 1986 |
|
SU1386548A1 |
| УСТРОЙСТВО ДЛЯ УСПОКОЕНИЯ РАСКАЧИВАНИЯ ГРУЗОЗАХВАТНОГО ОРГАНА | 2002 |
|
RU2209761C1 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 2000 |
|
RU2193517C2 |
| Транспортная установка для передачи изделий с одного конвейера на другой | 1981 |
|
SU1006345A1 |
| Самоустанавливающаяся траверса | 1984 |
|
SU1229168A1 |
| Автоматическое грузозахватное устройство | 1984 |
|
SU1184792A1 |
| Грузозахватное устройство | 1988 |
|
SU1652277A1 |
| АЭРОМОБИЛЬНЫЙ ПЕРЕГРУЗОЧНЫЙ КОМПЛЕКС | 1992 |
|
RU2047552C1 |
Изобретение относится к подъемно-транспортному оборудованию. Цель изобретения - повьшение надежности в эксплуатации. Устройство содержит траверсу 2 с установленными на ней захватными механизмами 5, штоки 8 которых размещены в направляющих и имеют на своей поверхности винтовые канавки с углом, большим угла самоторможения. В направляющих установлены штыри для взаимодействия с винтовыми канавками штоков, а штоки стопорятся относительно направляющих с помощью храпового механизма. При опускании устройства захваты устанавливаются в соответствии с формой груза, обеспечивая надежный с ним контакт. 5 ил.
вокруг оси штока 8, который установ- о направленное вверх, т.е. вдоль
лен на траверсе 2 с возможностью перемещения относительно нее в направляющих 10, на боковой поверхности шток 8 выполнена винтовая канавка 11, угол подъема которой больше угла самоторможения. Б направляющих 10 выполнены горизонтальные отверстия, в которых установлены штыри 12 для взаимодействия с винтовыми канавками 11 штоков 8.
Винтовая канавка 11 не доходит до верхнего торца штока 8 (фиг. 5), т.е. при крайнем нижнем положении штока 8 верхний конец канавки t1 упирается в верхний винт 12. Шток 8 и корпус 7.связаны между собой обгонно- стопорным устройством 13 (фиг. 2 и 4), выполненным в виде закрепленного на штоке 8 храпового колеса 14
45
50
55
оси 10. Поскольку угол подъема винтовой канавки 11 больше угла самоторможения, то от осевого усилия шток 8 начинает вращаться вокруг оси 10 и подниматься. При этом храповое колесо 14 вращается вместе со штоком 8, а собачки 15 прощелкивают зубьям храпового колеса 14. Штоки 8. и храповые колеса 14 межных грузоподъемных механизмов 5 вращаются в противоположные стороны. Так как электромагниты 6 в крайнем нижнем положении смещены на небольшие величины относительно друг друга, то они начинают контактировать с листом 19 в разное время. Это позволяет увеличить осевое усилие на торец штока 8 в начале его вращения, т.е. в момент преодоления инерции покоя штока 8.
направленное вверх, т.е. вдоль
оси 10. Поскольку угол подъема винтовой канавки 11 больше угла самоторможения, то от осевого усилия шток 8 начинает вращаться вокруг оси 10 и подниматься. При этом храповое колесо 14 вращается вместе со штоком 8, а собачки 15 прощелкивают зубьям храпового колеса 14. Штоки 8. и храповые колеса 14 межных грузоподъемных механизмов 5 вращаются в противоположные стороны. Так как электромагниты 6 в крайнем нижнем положении смещены на небольшие величины относительно друг друга, то они начинают контактировать с листом 19 в разное время. Это позволяет увеличить осевое усилие на торец штока 8 в начале его вращения, т.е. в момент преодоления инерции покоя штока 8.
313
Подъем каждого штока 8 происходит на величину, соответствующую уровню контактирующего с данным электромагнитом 6 участка листа 19. После надежного контакта всех электромагнитов 6 с поверхностью листа 19 опускание траверсы 2 прекращают и включают электромагниты 6, которые захватывают лист 19. Механизм подъема 3 под- нимает траверсу 2 на заданный уровень. Под действием силы тяжести листа 19 на каждый шток 8 действует осевое усилие, направленное вниз. Поскольку шток 8 заторможен от об- ратного вращения стопорной собачкой 15, а корпус 7 с электромагнитом 6 заторможен от вращения силой притяжения электромагнита 6 к листу 19, то хвостовик 8 остается неподвижньм в осевом направлении по отношению к траверсе 2. Так как штоки 8 зафиксированы в траверсе 2 жестко, то электромагниты 6 поднимают лист 19 на величину, равную величине хода траверсы 2 вверх. Под действием силы тяжести листа 19 в местах притяжения электромагнитов 6 к листу 19 возникают усилия, направленные вокруг осей 10, стремящиеся развернуть лист в горизонтальной плоскости. Однако поскольку эти круговые усилия, возникающие в смежных грузоподъемных механизмах 5, направлены в противоположные стороны, то они компенсируют друг друга, не вызывая кручений и искривлений листа 19. Балка 1 перемещает поднятую траверсу 2 с листом 19 на технологическую позицию 20, опускает на нее лист 19, электромагниты 6 отключают и траверсу 2 снова поднимают в верхнее исходное положение.
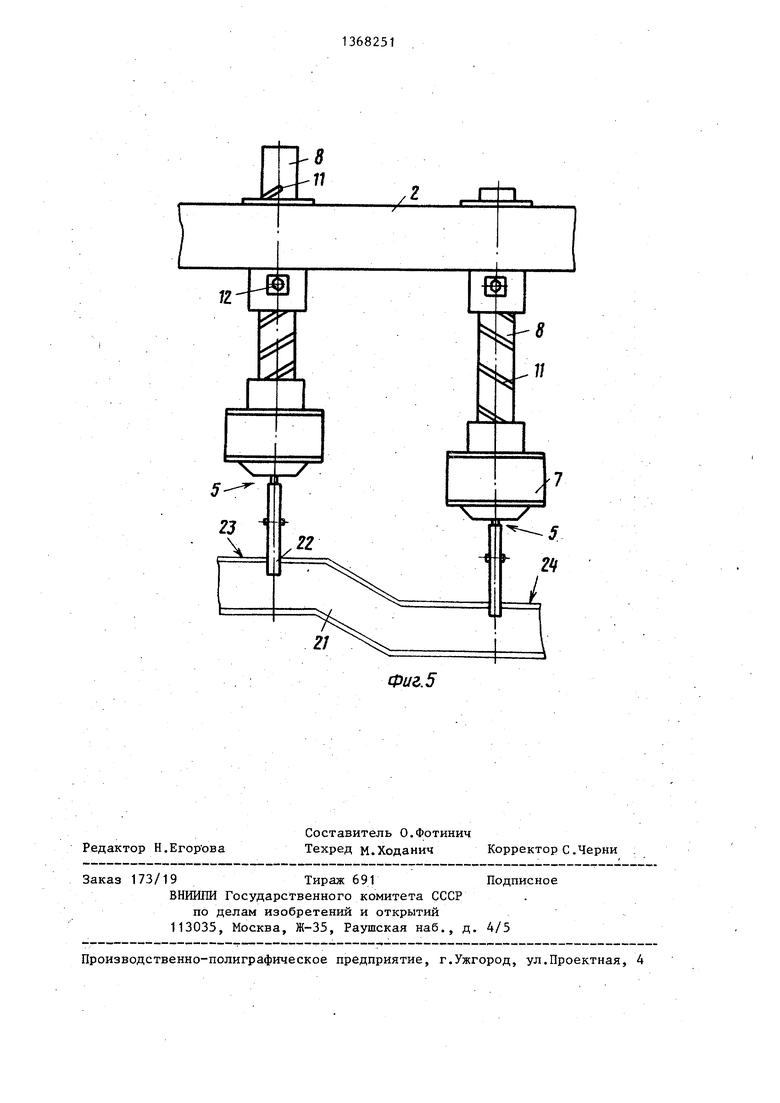
На фиг. 5 показан пример использования предлагаемого подъемно-транспортного средства для подъема грузов с большим перепадом уровней мест захвата, например, криволинейной балки 21. Для .этих целей на корпусах 7 монтируются специальные грузозахватные элементы 22. При опускании траверсы 2 один из грузозахватных элементов 22
1
контактирует с верхней плоскос тью 2 J балки 21, траверса продолжает опускаться до контакта другого грузозахватного элемента 22 с нижней плоскостью 24, При сбрасывании грузозахватных элементов 22 на захват изделия 21 траверсу 2 поднимают. Хвостовики 8 грузозахватных;/механизмов, будучи зафиксированными от поворота вокруг своих осей 10 силой сжатия грузозах- ватов 22, остаются зафиксированными и в вертикальном положении по отношению к траверсе 2, Происходит подъе изделия 21. Величина подъема изделия 21 равна величине хода траверсы 2 вверх.
Формула изобретения
Грузозахватное устройство щественно для листовых изделий, содержащее соединяемую с грузоподъемно машиной траверсу, закрепленные на ней вертикальные направляющие, установленные в них с возможностью перемещения штоки с захватными органами на их нижних концах и приспособления для стопорения штоков относительно направляющих, включающие в себя каждое зубчатый элемент и собачку, о т- личающееся тем, что, с целью повышения надежности в эксплуатации, на каждом штоке выполнены винтовые канавки с углом подъема, большим угла самоторможения, в направляющих выполнены горизонтальные отверстия,а устройство снабжено размещенными в последних штырями для взаимодействия с винтовыми канавками штоков, при этом зубчатый элемент каждого приспособления для стопорени представляет собой храповое колесо, установленное горизонтально на нижне конце штока, а собачка закреплена на соединенном с грузозахватным элементом корпусе, при этом шток установлен своим нижним концом в корпусе с возможностью вращения относительно него, а направления винтовых канавок соседних штоков противоположны.
фиг.з
ФцгМ
Фиг. 5
