с вторым входом первого блока деления, с вторьм входом второго блока умножения, с вторым входом первого блока умножения, с объединенными установочными входами первого и второго элементов сравнения, с выходом блока памяти через второй нормально разомкнутый контакт двухпозиционного переключателя - с выходом делителя частоты, информационный вьпсод блока квантования через первый нормально замкнутый контакт двухпозиционного переключателя соединен с первым информационным входом вычислительного блока, выход первого элемента вычитания связан с первым входом второго элемента вычитания, выход и второй вход которого подключен соответственно через первый блок деления к первому входу блока умножения и через второй блок деления к первому входу второго блока умножения, подсоединенного выходом к информационному входу первого элемента сравнения и к объединенным инормационным входам второго и третьего ключей, управляющие входы которых соединен соответственно с первым и вторым выходами первого элемента сравнения, выход первого элемента умножения связан с информационным входом первого ключа, управляющий вход и выход которого подключены соответ- ственно к второму выходу первого элемента сравнения и к объединенньм информационному входу второго элемента сравнения и информационному входу . четвертого ключа, управляющий вход которого подсоединен к первому выходу второго элемента сравнения, второй выход которого связан с третьим входом блока индикации, десятые выходы блока долговременной памяти подключены к соответствующим входам канала формирования модели дрейфа величины перерегулирования, выход которого соединен счетвертьм входом блока индикации.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля и вычисления параметров переходных процессов | 1973 |
|
SU485459A1 |
| Устройство для восстановления сигналов | 1988 |
|
SU1608706A1 |
| Электронная клавишная вычислительная машина | 1978 |
|
SU785869A1 |
| Система последовательного финитного управления конечным состоянием линейных стационарных динамических объектов | 1987 |
|
SU1467534A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ИДЕНТИФИКАТОРОМ И НЕЯВНОЙ ЭТАЛОННОЙ МОДЕЛЬЮ ПРИ ВРЕМЕННЫХ ЗАДЕРЖКАХ ИНФОРМАЦИИ В СИСТЕМЕ УПРАВЛЕНИЯ | 2001 |
|
RU2192031C1 |
| Адаптивная система управления для объектов с запаздыванием | 1985 |
|
SU1310774A1 |
| Устройство для диагностики и прогнозирования отказов | 1989 |
|
SU1629898A1 |
| Система синергетического стохастического управления технологическим процессом анаэробной очистки сточных вод | 2024 |
|
RU2835756C1 |
| Устройство для контроля аппаратуры генераторов автономных систем электроснабжения | 1986 |
|
SU1408392A1 |
| ВИРТУАЛЬНАЯ СИСТЕМА УПРАВЛЕНИЯ ПРОЦЕССОМ ВЫПУСКА ОДНОРОДНОЙ ПРОДУКЦИИ ПРЕДПРИЯТИЯ С ЕГО РЕГУЛИРОВАНИЕМ | 2017 |
|
RU2659364C1 |

1
Изобретение относится к вычислительной технике и может быть использовано в автоматизированных системах контроля динамических объектов для контроля и прогнозирования происходящих в них переходных процессов.
Цель изобретения - повьшение достоверности контроля за счет прогнозирования дрейфа параметров переходного процесса.
Принцип работы устройства основан на том, что динамику дрейфа одного из параметров переходного процесса во времени n(t) можно представить полиноминальной моделью т-го порядка
n(t) C;t (1)
Cg - результат контроля без прог нозирования (статическое значение параметра n(ta) CJ,
dn
: скорость измерения параметра;
г - dm
С;- j-r-
g Если модель линейная (), т.е.
то
С,
n(t) Со+ С, t n(t;+, )-п (t;) йп4
t;., -t;
ut
(2)
(3)
Если модель квадратическая (), т.е.
15
n(t) Сд+ C,t + Cjt,
(4)
то С, определяется как и ранее, а
zr ir- ---ll 20
Если модель кубическая (), т.е n(t) Со+ C,t + Cjt + Cjt (6)
то С, и Cj определяются как и ранее, а
,, /Лп,-йП2 ЬПг-ьп, ч -1 С( )At
U nj - 2&n2-un, ut
С О ч - Т
йпAt
Процедура вычисления коэффициентов динамических моделей (2), (4), (6) - С; состоит из элементарных операций вычитания результатов статического контроля в настоящий и предшествующий моменты времени и деления этой раз- ности на промежуток времени между моментами получения результатов, т.е из операхщй, используемых в известном устройстве, и идентификации модели (1) с реальным процессом дрейфа параметров во времени, (определения величины т). Для этого по заданному интервалу прогноза t
Т„р вычисляются
выражения (2), (4), (6) и на каждом этапе вычислений сравниваются настоящий и предыдущий результаты в соответствии с формулами
где - заданная погрешность идентификации.
Лри невыполнении очередного неравенства, например, (11), процедура идентификации завершается и принимается модель, используемая на этом шаге, в данном случае (10), т.е. квадратическая.
Значе)1ию прогнозированного на момент Т„ параметра переходного процесса соответствует величине
(12)
п(Т,„ ) Со-ь С,Тир +
-лр
С.Тпр
В данном устройстве реализуется обратная задача прогноза, т.е. определяется значение параметра за заданвремя Т„р и.
тем самым, либо подтное
верждается достоверность решения о
работоспособности динамической систе- 55 вход которого с нормализатора мы по результатам контроля, в случае 31 подаются синхроимпульсы, обеспечив невыхода результата (2), (4), (6) вающие его работу. С выхода блока 1 за допуск, либо определяется запас проквантованная функция переходного работоспособности путем уменьшения процесса поступает на первый информа
10 15
68893
ТПР до величины, обеспечивающей вхождение (2), (4), (6) в допуски.
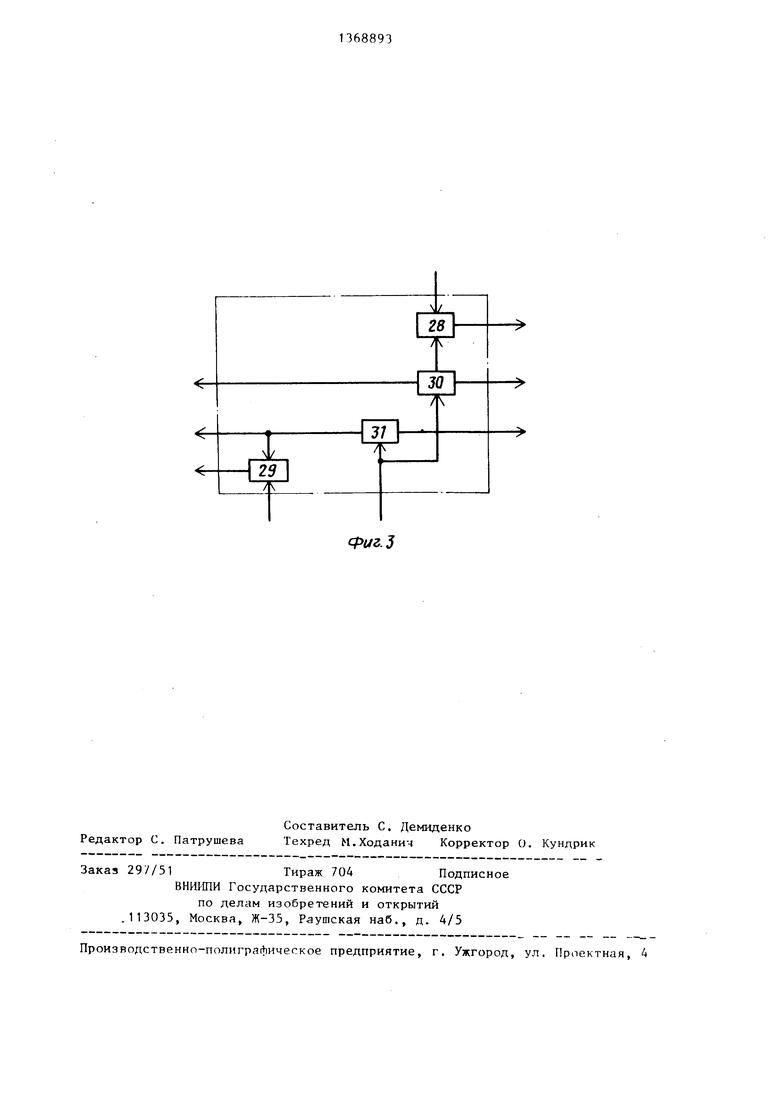
На фиг.1 приведена схема, поясняю- t щая работу устройства, на фиг.2 - идентификатор модели, содержащий два аналогичных по структуре канала (на схеме раскрыта структура канала формирования модели дрейфа времени установления объектов контроля Т), на фиг.3 - блок управления.
Устройство содержит блок 4 квантов 10 й 15 .
, двухпозиционный блок 6 измерения
переключатель временных интер20
вания, вычислительный блок 2, блок 3 памяти, блок 4 долговременной памяти
5,
валов, блок 7 управления, блок 8 индикаций, идентификатор модели 9, генератор 10 возмущающего сигнала, делитель 11 частоты и генератор 12 тактовых импульсов.
Идентификатор модели (блок 9) включает первый 13, второй 14 и третий 15 элементы вычитания, первый 16
25 и второй 17 элементы деления, первый 18 и второй 19 элементы умножения, первый 20, второй 21, третий 22 и четвертый 23 ключи, первый 24 и второй 25 элементы сравнения, сумматор
30 26 и канал 27 формирования модели дрейфа величины перерегулирования.
Блок 7 управления содержит.четвертый 28 и пятый 29 ключи, элемент 30 задержки и нормализатор 31.
35 Устройство производит контроль и прогноз двух параметров переходного процесса: времени установления объекта контроля (Т) и величины перерегулирования 7 .
40 После запуска генератора 12 с выхода делителя 11 частоты подаются синхроимпульсы, которые после задержки элемента 30 поступают на вход запуска генератора 10 и на измеритель45 ный вход блока 6. Сигнал с выхода генератора 10, синхронизируемого сигналом с выхода делителя 11 частоты, по- дается на вход объекта контроля, вызывая в последнем переходный процесс.
50 Функция переходного процесса, содержащая информацию о технической состоянии объекта контроля, в виде ненепрерывного сигнала подается на информационный вход блока 1, на синхро513688936
ционный вход блока 2, на второй инфор- линейной модели (2) или iCt;), T(t;.,)
мационный вход которого из блока 7 поступают сигналы о константах, необходимых для вычислений, а из блока 6 подается сигнал, о значении интервала квантования, необходимый для определения длительности переходного процесса. Из блока 2 в блок 7 поступают результаты сравнения вычисленных ин- ю тервалов времени с допусками, которые затем подаются на второй вход блока 3. Кроме того, с первого выхода блока 2 на блок 3 и со второго выхода блока 2 на блок 8 подаются текущие результаты сравнения для запоминания и индикации результатов сравнения.
Величина перерегулирования также вычисляется в блоке 2 как 21 р - р
ev -II f-r .
15
T(t,,i ) и net,), HCt ,v, ), г ( )
в случае ,квадратической модели (4), |или T(t;), T(t;,, ), T(t,j), Kt,), HllCt,), i:(t;,, ), STCt;,), Z(t,,,) Б случае кубической модели (6) подаются из блока 4 по тактирующим сигналам, поступающим из блока 11 в идентификатор модели 9, где элементами 13,14,15 вычисляются первые, вторые, третьи соответственно числители вьфа- жений (3), (5), (7) разности параметров.
В практически важных случаях вычисление заканчивается на третьих разностях, так как в пределах периода контроля модель динамики процессов, связанных со старением, имеет степень не выше второй. Полученные разности делятся в элементах 16 и 17 на интервал времени между измерениями it и умножаются элементами 18 и 19 на интервалы прогноза Т;,р в соот- 25 ветствии с выражениями (2), (4),(6).
20
максимальное квантованное значение параметра объекта контроля. определения Т и XI в блоке 2
т проверкха неравенств
(U)
т т
3 - -макс ;
(15)
где Т и соответственно максимально допустимое время переходного процесса и максимальное значение перерегулирования (допуски на параметры Т и 21 переходного процесса).
Если неравенства (14) и (15) справедливы, то с блока 2 через блок 3 вы выдаются информационные сигналы на запись результатов контроля в блок 4. Одновременно результаты контроля из блока 4 взводятся в идентификатор 9, который осуществляет процесс идентификации динамической модели параметров (1) .
Первый информационньй вход блока 2 отключается переключателем 5 от вьпсода блока 1 и подключается к первому выходу блока 4, на второй информационный вход которого с блока 3 пос поступает информация о результатах вычислений, полученных без уточнения достоверности результатов контроля,
Идентификация модели происходит следующим образом.
Значения вычисленных во время статического контроля параметров T(t;), T(t,4, ) и Z(t;), E(t,4, ) в случае
линейной модели (2) или iCt;), T(t;.,)
5
T(t,,i ) и net,), HCt ,v, ), г ( )
в случае ,квадратической модели (4), |или T(t;), T(t;,, ), T(t,j), Kt,), HllCt,), i:(t;,, ), STCt;,), Z(t,,,) Б случае кубической модели (6) подаются из блока 4 по тактирующим сигналам, поступающим из блока 11 в идентификатор модели 9, где элементами 13,14,15 вычисляются первые, вторые, третьи соответственно числители вьфа- жений (3), (5), (7) разности параметров.
В практически важных случаях вычисление заканчивается на третьих разностях, так как в пределах периода контроля модель динамики процессов, связанных со старением, имеет степень не выше второй. Полученные разности делятся в элементах 16 и 17 на интервал времени между измерениями it и умножаются элементами 18 и 19 на интервалы прогноза Т;,р в соот- 5 ветствии с выражениями (2), (4),(6).
В процессе вычислений элементами 24 и 25 проверяется выполнение соотношений (9), (10). Значение прогнозированных на момент Т,,„ параметров вы0
0
35
40
45
пр числяются в рассматриваемом случае
квадратической модели в соответствии с формулой -(12), полученные результаты записываются в блок 4 и с него ; поступают в блок 2, где вновь сравниваются с допусками по формулам (14) и (15). Если неравенства (14) и (15) выполняются, то принимается окончательное решение о годности объекта контроля, кроме того, блок 8 осуществляет индикацию величин Т и 21 . Если же неравенства 2 (14) и (15) не выполняются, то результат {сонтроля яв- ляется недостоверным.
Техническим эффектом изобретения является повьш1ение достоверности контроля за счет прогнозирования изменения параметров переходного процесса во времени.
50
Положительный эффект заключается в уменьшении количества операций контроля, снижении трудозатрат и высвобождении обслуживающего персонала для выполнения своих основных функ- циональных обязанностей, а также снижение времени простоя аппаратуры.
фиеЛ
Фиг. 2
Фиг.
