| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического контроля системы управления тиристорным преобразователем | 1988 |
|
SU1613372A1 |
| Цифровой тахометр | 1983 |
|
SU1151888A1 |
| Способ контроля угловых качаний ротора синхронного электродвигателя и устройство для его осуществления | 1980 |
|
SU917084A1 |
| Цифровой тахометр | 1986 |
|
SU1352371A2 |
| Устройство для согласования углового положения синхронно-вращающихся валов электродвигателей постоянного тока | 1983 |
|
SU1100700A1 |
| Устройство для автоматического управления стендом испытания муфты изменения угла опережения впрыска топлива | 1987 |
|
SU1599572A1 |
| Устройство для измерения мощности цилиндров двигателя внутреннего сгорания | 1990 |
|
SU1789898A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208771C2 |
| Устройство для позиционного управления электроприводом постоянного тока | 1981 |
|
SU1003286A1 |
| Дискретно-цифровой электропривод | 1985 |
|
SU1350800A1 |
Изобретение позволяет повысить быстродействие, увеличить точность и упростить конструкцию. Устр-во содержит электродвигатель 1, блок 2 тиристорного преобразователя, датчики 3, 5 и 6 частоты вращения, контроля исходного углового положения ведущего и ведомого валов 7 и 8 с соответствующими носителями 9 и 10 меток на этих валах, тахометр 4, систему измерения, связанную с датчиками 5 и 6, датчики 11 и 12 контроля угла отставания вала 8 от вала 7 и два взаимодействующих с ними соответствующих носителя 13 и 14 меток на валу 8. Система измерения выполнена в виде программного блока 15, компаратора 16, селектора 17, схем 18, 19 и 20 совпадения, индикатора 21 годности. При совпадении датчиков 11 и 12 с соответствукяцими метками формируется сигнал управления , позволяюпщй исключить из схемы электронные устр-ва. 1 ил. с в (Л
17
-Jf raSeH 1%Д
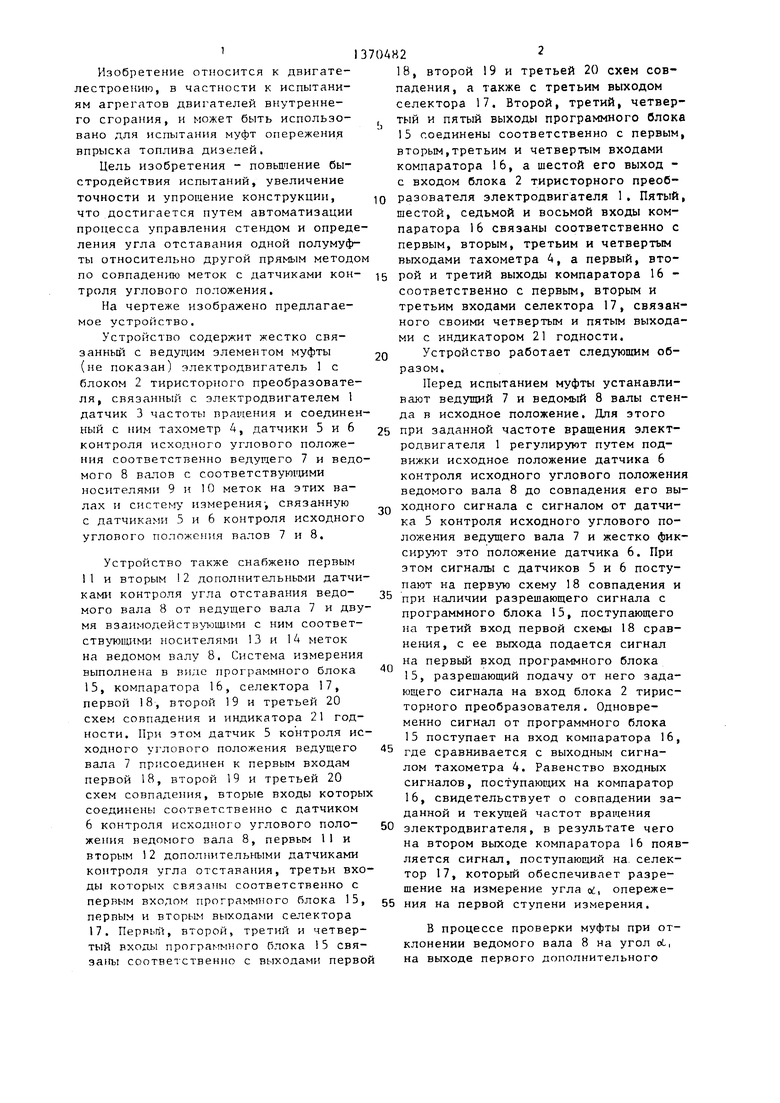
Изобретение относится к двигате- лестроению, в частности к испытаниям агрегатов двигателей внутреннего сгорания, и может быть использовано для испытания муфт опережения впрыска топлива дизелей.
Цель изобретения - повьшшние быстродействия испытаний, увеличение точности и упрощение конструкции, что достигается путем автоматизации процесса управления стендом и определения угла отставания одной полумуфты относительно другой прямым методо по совпадению меток с датчиками контроля углового положения.
На чертеже изображено предлагаемое устройство.
Устройство содержит жестко связанный с ведущим элементом муфты (не показан) электродвигатель I с блоком 2 тиристорного преобразователя, связанный с электродвигателем 1 датчик 3 частоты вращения и соединенный с ним тахометр 4, датчики 5 и 6 контроля исходного углового положения соответственно ведущего 7 и ведомого 8 валов с соответствуюищми носителями 9 и 10 меток на этих валах и систему измерения; связанную с датчиками 5 и 6 контроля исходного углового положения валов 7 и 8,
Устройство также снабжено первым 11 и вторым 12 дополнительными датчиками контроля угла отставания ведомого вала 8 от ведущего вала 7 и двумя взаимодейству11эщ11ми с ним соответствующими носителями 13 и 14 меток на ведомом валу 8. Система измерения выполнена в виде программного блока 15, компаратора 16, селектора 17, первой 18, второй 19 и третьей 20 схем совпадения и индикатора 21 годности. При этом датчик 5 контроля исходного углового положения ведущего вала 7 присоединен к первым входам первой 18, второй 19 и третьей 20 схем совпаде1П1я, вторые входы которы соединены соответственно с датчиком 6 контроля исходного углового положения ведомого вала 8, первым 1 и вторым 12 дополнительными датчиками контроля угла отставания, третьи входы которых связаны соответственно с первым входом программного блока 15, первым и BTopbLM выходами селектора 17. Перрыт, второй, третий и четвертый входы программного блока 5 свя- заШз соответственно с выходами перво
5
0
18, второй 19 и третьей 20 схем совпадения, а также с третьим выходом селектора 17. Второй, третий, четвертый и пятый выходы программного блока 15 соединены соответственно с первым, вторьм,третьим и четвертым входами компаратора 16, а шестой его выход - с входом блока 2 тиристорного преобразователя электродвигателя 1. Пятый, шестой, седьмой и восьмой входы компаратора 16 связаны соответственно с первым, вторым, третьим и четвертым выходами тахометра 4, а первый, второй и третий выходы компаратора 16 - соответственно с первым, вторым и третьим входами селектора 17, связанного своими четвертым и пятым выходами с индикатором 21 годности.
Устройство работает следующим образом.
Перед испытанием муфты устанавливают ведущий 7 и ведомый 8 валы стенда в исходное положение. Для этого 5 при заданной частоте вращения электродвигателя 1 регулируют путем подвижки исходное положение датчика 6 контроля исходного углового положения ведомого вала 8 до совпадения его выходного сигнала с сигналом от датчика 5 контроля исходного углового положения ведущего вала 7 и жестко фиксируют это положение датчика 6. При этом сигналы с датчиков 5 и 6 поступают на первую схему 18 совпадения и при наличии разрешающего сигнала с программного блока 15, поступающего на третий вход первой схемы 18 сравнения, с ее выхода подается сигнал на первый вход программного блока
15,разрешающий подачу от него задающего сигнала на вход блока 2 тиристорного преобразователя. Одновременно сигнал от программного блока 15 поступает на вход компаратора 16, где сравнивается с выходным сигналом тахометра 4. Равенство входных сигналов, поступаюсдих на компаратор
16,свидетельствует о совпадении заданной и текущей частот вращения электродвигателя, в результате чего на втором выходе компаратора 16 появляется сигнал, поступающий на селектор 17, который обеспечивает разрешение на измерение угла (х, опереже5 ния на первой ступени измерения.
В процессе проверки муфты при отклонении ведомого вала 8 на угол оС, на выходе первого дополнительного
0
5
0
5
0
датчика 11 появляется сигна- i, поступающий одновременно с сигналом с датчика Ь контроля углового положения ведомого вала 8 на входы второй схемы 19 совпадения, на выходе которой появляется сигнал разрешающий измерение результата, в программном блоке 15 и поступление величины измеряемых пределов текущего значения частоты вращения на компаратор 16, где сравнивается с текупшм значением частоты вращения электродвигателя 1 получаемым от тахометра 4. В результате на выходе компаратора 16 появляются сигналы, поступающие на вход селектора 17, где они анализируются Если текущее значение частоты вращения привода находится в диаггазоне допустимой минимальной и максимальной частот вращения, то на индикатор 21 годности загорается сигнальная лампа Годен и одновременно в программный блок 15 с выхода селектора 17 поступает сигнал на перевод электродвигателя 1 на следующую ступень частоты вращения. Во вторую схему 19 совпадения поступает сигнал запрета измерения, а в третью схему 20 совпадения - сигнал разрешения замера, который производится при одновременном поступлении на входы третьей схемы 20 совпадения сигналов от датчиков 5 и 12, когда частота вращения достигнет необходимого значения и процесс замера повторяется. Если достаточно замера на одной ступени, то испытание на второй и последуюпд1Х ступенях не проводится. Если при замере теку1дее значение частоты вращения привода выходит за пределы допустимого диапазона частот, то на индикаторе 21 годности загорается сигнальная лампа Крак и муфта бракуется.
Предлагаемое устройство (в отличие от известных) обеспечивает повышение точности за счет формирования сигналов управления при совпадении дополнительных датчиков контроля угла с соответствующими метками, что позволяет исключить из схемы электронные устройства - формирователи длительности импульса и запоминающие устройства, а следовательно, упростить конструкцию и сократить затраты на изготовление и налад1 у стенда. Форму.па изобретения
Устройство автоматического управления стендом для испытания муфты
0
5
0
5
0
5
изменения угла опережения впрыска топлива, содержащее жестко связанный с ведущим элементом муфты электродвигатель с блоком тиристорного преобразователя, .связанный с электродвигателем датчик частоты вращения и соединенный с ним тахометр, датчики контроля исходного углового положения ведущего и ведомого валов с соответствующими носителями меток на этих валах и систему измерения, связанную с датчиками контроля исходного углового положения валов, о т л и ч а- ю 14 е е с я тем, что, с целью повышения быстродействия, увеличения точности и упрощения конструкции, устройство снабжено первым и вторым дополнительными датчиками контроля угла отставания ведомого вала от ведущего и двумя взаимодействующими с ним со- ответствуюпд1ми носителями меток на ведомом валу, а система измерения выполнена в виде пpoгpa tмнoгo блока, компаратора, селектора, первой, второй и третьей схем совпадения и индикатора годности, причем датчик контроля исходного углового положения ведущего вала присоединен к первым входам первой, второй и третьей схем совпадения, вторые входы которых соединены соответственно с датчиком контроля исходного углового положения ведомого вала, первым и вторым дополнительными датчиками контроля угла
отставания, а третьи входы которых связаны соответственно с первым выходом программного блока, первым и вторым выходами селектора, первый, второй, третий и четвертый входы программного блока связаны соответственно с выходами первой, второй и третьей схем совпадения, а также с третьим выходом селектора, второй, третий, четвертый и пятый выходы программного блока соединены соответственно с первым, вторым, третьим и четвертым входами компаратора, а шестой его выход - с входом блока тиристорного преобразователя электродвигателя, пятый, шестой, седьмой и ворь- мой входы компаратора связаны соответственно с первым, вторым, третьим и четвертым выходами тахометра, а первый, второй и третий выходы компаратора - соответственно с первым, вторым и третьим входами селектора, связанного своими четвертым и пятым выходами с индикатором .годности.
| Устройство для испытания подшипников | 1980 |
|
SU964515A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
