1
И:(()б)етон11е относится к мета. ктообра- боткс, в частности к устройствам для компенсации и:(Н()са обрабатывающего инструмента,
lU .M, и (обретения повышение точности об|)абогки :ia счет исключения влияния из- м(мнчп|й темнературы и ис 1равления HorpeiH- Hocieii формы Н лифовально1 о круга, возникающих н процессе обработки.
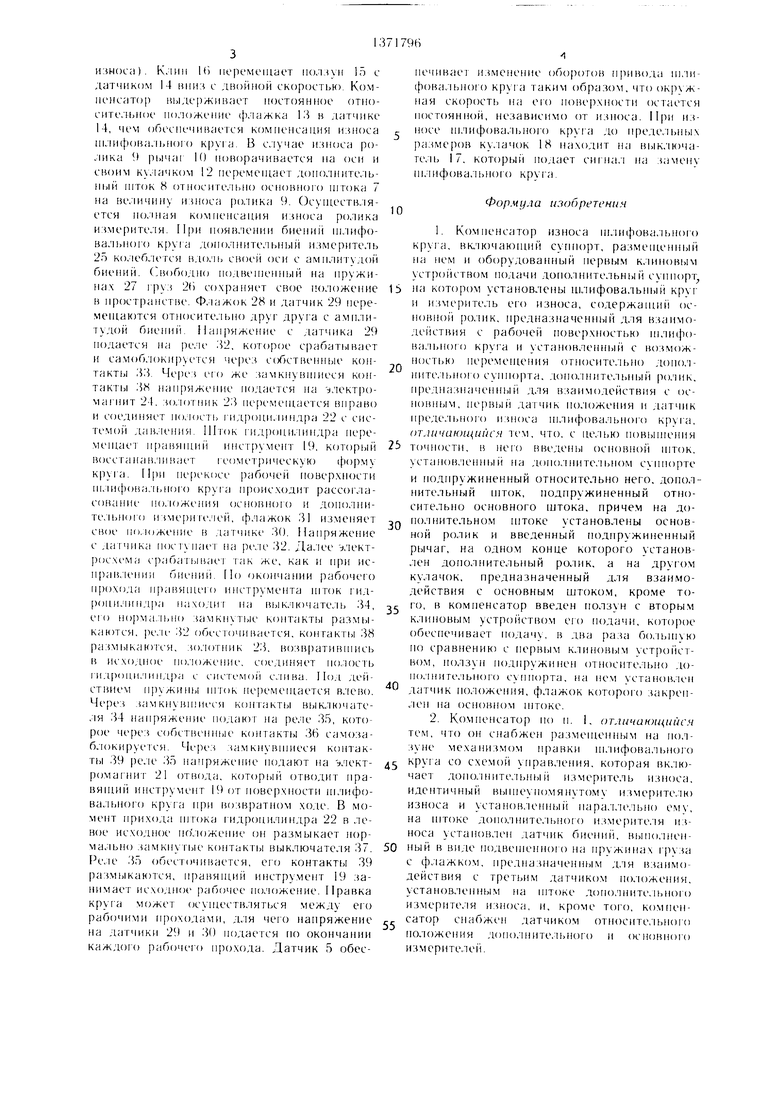
1а ({ ИГ. 1 изображен кслшенсатор износа (н.шфовальног о круга; на фиг. 2 разрез Л-Л иа фиг. 1 с ме.ханизмом правки и устройством уцравления.
Комненсатор износа шлифовального кру- la состоит из основного суниорта 1. на кото- )ом с возможностью перемещения установлен подпружиненный дополнительный суппорт 2, снабженны11 клнновым устро11ством подачи в виде клина 3 с н)ивод{).м 4. Привод 4 может иметь любую конструкцию и нрин- цип действия (ылект)ический. гидравлический и т. д.). FJa осиовном сугшорте 1 уста- HOB.ieH дагчик о регулятора скорости вра- nteiHUi нг 1И((1Овального круга. Па допо.тни- Т(.мьном сунпо)ге 2 раз.гнмцен И1. Н1(|1()ва. круг 6, )13ме)ите. П) износа в виде подпружиненного основного HiTOKa 7, в котором е иозможностьж) ,епия расположен под(|ружипе пп,н 1 дополнительный П1ток 8. 11а .lono.iHH ге/ibHOM штоке 8 размешен cje- новной ро/шк 9 .тля взаимодействия с рабочей 11()|(ер.пост1)1о 1Н,п)фова/1Ьного круга В и подпружиненный рычаг К), па одном конце которого 1)ас11ол()жеп ро;шк 1 I для взаи.мо- действия с основным роликом 9, а на другом ку,1ачок 12 для взаимодействия с основным HiioKOM 7, снабженным ((лтажком 13 д. 1я взаимоде1(ствия с датчиком 14 положения. Датчик 14 установлен на подпружиненном но.чзуне 15, подача которого ocyntecTB- .1яегся вторым клипом 16 клинового устройства подачи. При JTOM к.лин 16 обеспечивает в дна раза бо.тьп1ую подачу ползуна 15, чем клин 3 подачу до||олните.Т1,нг)го суппорта. Па доно.чнительном сушюрте 2 установлен датчик пpeдeлt)Hoгo износа Н1лифова. 1ьного круга в ви.те выключателя 17, взаимодей- ствуюпим о с кулачком 18, размещенным па основном пггоке измрите,тя 11зн(к а. Па ползуне 15 размепи н ме.чанизм правки пкти- фова.льного круга, состоящнй из правящего инст)умента 19, устансшленного с возможностью ново)()та на оси 20 и снабженного 1лектр()ма1 нитом 21 отвода. Правянщй инсгруменг 19 и :,тектромагнит 21 отвода устанон. 1ены на нпсже гидроцилиндра 22, бес1ИТ() но, 1ость которого соединена с снсгемами даЕ),;1епия и слива через зсх ют- ник 23 с :-,:1ект)омагнит()м 24 управления. Устро1(ство управ, 1еиия механизмом правки включаег дополпите.тьный измеритель 25 изпоса, когор1 |й установлеи параллельпо основному. Иа доно.тпительном измерителе 25 установлен датчик биений в виде груза 26, подвешенного на пружинах 27. Груз 26 снабжен флажком 28 для взаи.модействия с датчико.м 2(.) положения. Иа донолните-ль- но.м измерителе 25 гакже усгановлен датчик 30 относите.чьного по.тоже(П1Я доно,ч11И- тельно1 о и ocHOBHOi o измериге.ид, д.чя взаимодействия с которы.м основной из.меритель снабжен ( - ажком 31. Датчики 29 и 30 со- единеш, с pe.ie 32, обм(ггка которого через
О собственные норма.тьно разомкнутые контакты 33 соединена с нормально замкнутыми контактами вык,:1ючате.тя 34. Пормальпо разомкнутые контакты вык.тючателя 34 соединены с pe.ie 35, обмотка которого через
5 собственные нормально разомкнутые контакты 36 соединена с вык,1ючат1 1ем 37. Выключатели 34 и 37 ЯВ.1ЯЮТСЯ ()гра1Н1чите.лямн движеиия правящего инструмепга 19 в осевом относите.1Ы1() или())О1)а,1Ы1ого круга направленни. Через ,льно разомкнутые
контакт) 38 pe,ie . i2 .1ектрома нит 24 угграв- .тения золотником связан с 1епьк) 1Н{тания, а через 1()рма. pa.3() i ,ie контакты 39 |)е. 35 с ,лекгро- 21 от)ода 1)() и 1слруме Г а 19.
5Па ()1И. 2 д,-1Я )оп1ен 1я noKa.
ос 1овпые д(),.Л,11,е ()К, а гакже меха 1изм11 износа |1олико)
как , гак l ) 13Мерите.лей .
Ко СТруК Я ОС О В ДО IO.1 ИЛ е,Л .0 пого 1змер 1телей изпоса дептич)1. кажд,Й из Ш снабжен меха1 и.змом
износа , СОСТОЯ 1НМ 13 .,. Ь- ) ТОКа, ра 1М С )
с возмож 1ост1.,к) осево1Ч) 1ер1 ме, i осНОМНОМ, ia . ЦЦ 1(Ц)1ОМ 1 ГОК1 раЗМС е- П)1 рО.ЛИК 1 1()Д 1руЖИ 1е 1П1)П ) , а ОДНОМ
котор() о размеп1е |)о.пк д.я взаимодействия с основнь м ро.ликом, а па др ОМКу,ТаЧОК Д,ЛЯ ВЗаИМОДе 1СТ И Я с Н ТОКОМ.
0 Датчик может б)1Т) ,ожс П и па осповном и ia е. П()КС
как ()) O, так и ДОГ();1ШГГе,() 3 1Срите.ля износа.
В роцессе обработки пли()к)ва,
. кру fi ностоян1 о из 1аП ивается, его диа.метр умень пается. Паходя и1Йся в постоя П1()м контакте с рабочей Овер.н()СТ)Ю крул а )- им роликом 9 ток 7 О ускается со скоростью, равной скорости . Ф.лажок 13 изменяет свое 1оложе1ше в датчике 14, и
0 на привод 4 подают ,T. Привод 4 нает 1ерсме иать клинья 3 16 леио. Клип 3 осу нествляет (одачу д() |е.льно() порта 2, и следоватс,л)НО, 1,(})ова.) 6 вниз. При :)том )сть еремеп1е- ния флажка 13 в два раза больн1е )сти износа кру а (скорость лифоваль- ((М О )С скорость нереме це я )ЛНИТеЛЬН()1Ч) )рта Д,Я
5
5
износа). K. inii It) перемещает ползун lo e датчиком 14 вниз e двойной екоростью. Ком- lioieaTop выдерживает ноетоянное отно- снте, Н)Иое положение ((). 1ажка 1, в датчике 14, чем оГ)ее11ечи аетея компенеация изноеа п1.ти({)ова,1Ы1ог() к|)та. В с.лучае H3H(jea ро- ;п)ка 9 рычаг И) )рачиваетея на оеп и своим кулачком 12 Г1еремен1.аст дополните.пь- ный пггок X относительно основного 1нтока 7 на величину износа ролика 9. Осуществляется но.1ная компенсация износа ролика измерите.тя. 11()и ноявлении биени11 1нли(})()- вально1-) K)yia дополнительны измерител1 25 ко.чеолется вдол) своей оси е амнлитудой биений, ( вободно Н()двен1енный на нружи- на.х 27 груз 2Н со.храняет свое положение в нространстве. Флажок 28 и датчик 29 перемещаются относите. друг друга с амплитудой биений. Напряжение с датчика 29 подается на pe/ie 32, которое ерабат1)1вает и са.1()блок11|)уется че|)ез собственные кон- такт1)1 33. Через его же замкнувншеся контакты :W напряжение подается на электромагнит 24. .зо.ютпик 23 перемещается Е нраво и соединяет нолость гидронилипдра 22 с системой давления. Шток гидроци, 1индра нере- .veHuiei н)авяни111 инст)умеит 19. который восетанав,1ивас Т i еомет 1ичеекун) ((юрму круга. При пе)екосе рабочей новер.хности нlли(. Ыlol o Kpyi a проис.ходит расс()1 ла- еование но.южения основного и донолни- те.11)Ного изме)и гелей, |)лаж()к 31 изменяет свое но.южепис в датчике 30. Напряжение е датчика пос1лнает ia реле 32. Да.лее элект- })()С.хема t-раба Г1) так же, как н при ие- пра1.1епи11 биений. По окончании рабочег о н)о.хода н)авя1Него инструмента шток гид- )они. Н1ндра паходиг на вык.аючатель 34, CIO порма.тьно замкн 1Т)1е контакт) каются. pe.ie 32 обест()ЧИ 5аетея, ко 1такт 38
раЗМ)КаК) СЯ, 30,() 23, ОЗ)|) ИСХОД 10С ОЛОЖе 1е, СОеДИ 1ЯеТ ОЛОСТЬ
Г11дроци 1инд|)а с системо с,тива. Под действием |ружи, ток ереме цается в,. Через .() к() В,1клк)чате- 34 1а ряжение подаюг а 35, которое че)ез еобет им1,1е контакт. 36 самоза- б,.окируется. -К рез .зам К ув 1иеся ты 39 реле 35 ()дают а алектрО. 21 отвода, КОТОр Й () ра- П СТруМе Т 19 ОТ ОВер.Х ОеТ ЛИФОва,Ь()Ч) р 5озврат()м xtxie. в мо- .хода 1тока 22 в левое ис.()е о ложе К он размыкает ()р- . г)е К()такт) В)ключате. 37. 35 обс еточ 1)ается, его контакт) 39 размыкаются, И струме т 19 за- 1имает 1С.ход()е рабочее .. Правка может оеу 1ест 1ляться между ) рабоч ми рох()дам, д.ля че() а ряжение а датчик 29 30 одается о оконча ии каждо() рабочсчч) 1ро.хода. Датчик 5 обес0
3
0
3
0
5
0
5
0
5
оборотов )Да 1, 1И((1овалы 0 о кру а таким образом, чтоокр ж- ая скорост) а е() HO iejxx ocT i остается
ОСТОЯН)ОЙ, НеЗаВИС 1МО от . 3- 1ОСе , ифОВа;)() до реДе,)Х
разме)ов ку.ачок 18 )а ))к,)ча- тель 17, кот()р)Й ()дает а
. фоваЛ)О) .
Формула изобретения
1.КоМ еНСаТОр изноеа .фова, 1)1()-() Kpyi a, ВКЛЮЧаЮ и1Й СуГ()рТ, pa3Me ie) i а ем ()боруДС) ер)1)М К, устройством 1()ДаЧ ДО()Л 1 ТеЛЬН)1Й ,, котором уСТа 1ОВДе Ы 1 ЛИфОВа,1Ь)Й
1змер тель его зноса, содержа ()Й )О., реДНаЗ ачеН)Й ДЛЯ с рабочей НОВер.Х()СТЬК) (| 10вал)0) круга уста овленн)Й с возмож ОСТ)Н) ереме 1е ИЯ ОТ ОС ТеЛЬНО Te,() о , ТеЛ i) i рО,,
. для вза модейетвия с ос()), ерВ)П1 даТЧИК О. 1
реде;)() о 1. .Ч)) ,
отличающийся тем, что, с ie;,K) ОВ) , i ВВеДе)) ()Й Т()К, ,) i а ,,))М и ОД руЖИНеННЫЙ относительно него, ДО 1ОЛ ительный , поднружиненный отно- ситель о основного итока, приче.м на до- ол 1ительном токе установле ы основной и введенный 1 однружи 1енн Й р)чаг, на одном конце которого установлен ДО ОЛ ИТеЛЬНЫЙ , И На )М
кулачок, предназначенный для взаимодействия с основным штоком, кроме того, в ком енсатор введен Г олзун с вторым устроiicTBOM одачи, которое обесг ечивает одачу, в два раза бо,) о ) с ерв)м )м устройстВОМ, ()ЛЗу ОД ру Ж 1 ie ОТ()С ИТеЛ Ь() ДО- 0,. , На еМ уСТа()5,
ол(), флажок котор() о закре Ле а ()С ОВНОМ ТОКе.
2.Ком е сатор о . 1, отличающийся тем, что он е 1абже разме 1е Н)м а ()лЗуне Ме. раВК ,П)
круга со схемой у равле ия, которая включает Д()))Й , ИДе 1ТИЧН,Й ВЫ еу1 ОМЯНуТОМу )
износа и араллель() ,
на ТОКе ДО(),)0() ЗМе , Я 3- НОеа уСТа)()В, 1е , В)(), 1ЫЙ в () а | 1уЗа с ф,()М, реД аЗНаче 1 1Ь М для ()- ДеЙСТВ Я с ТреТЬ 1М ДаТЧ11КО и),(), уСТаНОВ.)1М а ТОКе Д().() ИЗМер ТеЛЯ , 1, кроме того, еатор ОТ(),)()() ОЛ() )10ГО 1 ОС ОВ()()
из мер теле 11.
21
Фиг.1
м--ч./«
-35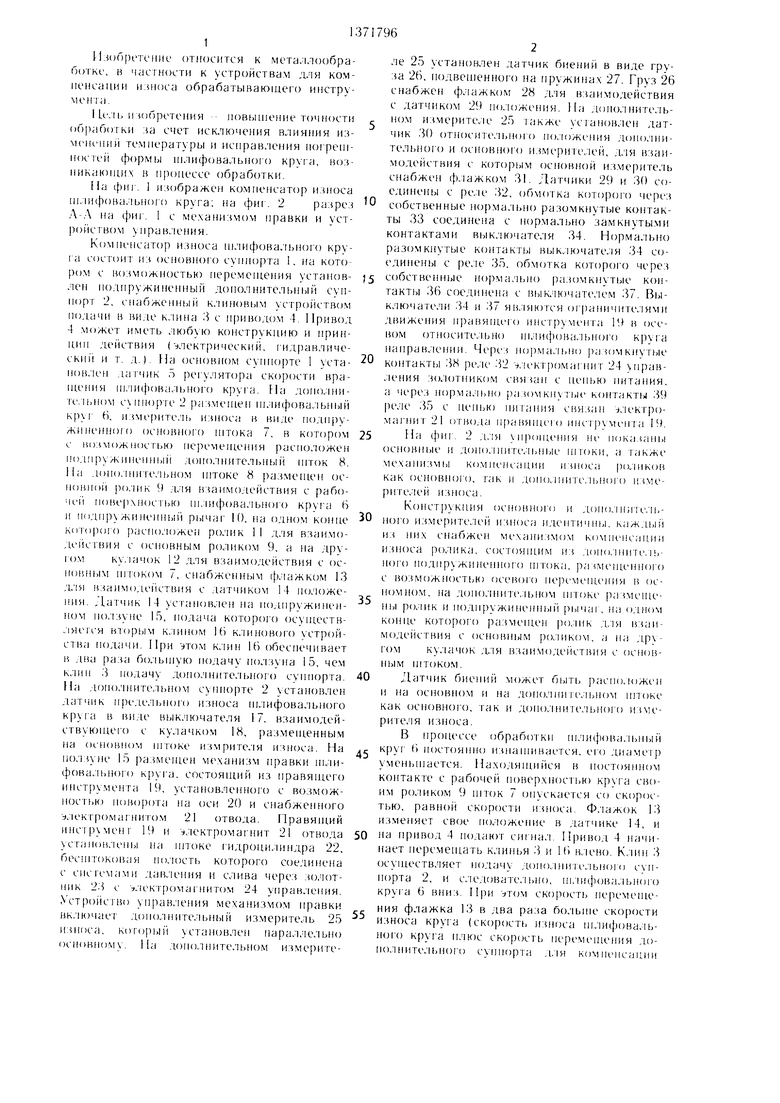
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления обрабатывающим инструментом | 1984 |
|
SU1351744A1 |
| Компенсатор износа шлифовального круга | 1984 |
|
SU1184652A1 |
| Автоматический резьбонарезной станок | 1986 |
|
SU1335416A1 |
| Храповой механизм | 1985 |
|
SU1283468A1 |
| Устройство для измерения износа контактного провода | 1981 |
|
SU1294660A1 |
| Резьботокарный полуавтомат | 1986 |
|
SU1366330A1 |
| Копировальное устройство | 1983 |
|
SU1121125A1 |
| Устройство для компенсации износа инструмента | 1983 |
|
SU1166964A1 |
| Релейная клавишная вычислительная машина для автоматического выполнения арифметических операций | 1958 |
|
SU123762A1 |
| Храповый механизм | 1984 |
|
SU1201593A1 |
Изобретение относится к металлообработке, в частности к устройствам для компенсации износа обрабатывающего инструмента. Цель изобретения - повышение юч- ности обработки за счет автоматического контроля формы круга в процессе его работы и автоматического иснравления возникающих ногрещностей. Компенсатор износа шлифовальног о круга включает размещенный на нем супнорт и оборудованный клиновым устройством нодачи дополнительный суппорт, на котором установлен шлифовальный круг и измеритель его износа, содержащий датчик положения и основной ролик для взаимодействия с рабочей поверхностью шлифовального круга, датчик регулятора скорости вращения шлифовального круга и датчик его нредельного износа. В основном штоке измерителя износа установлен с возможностью перемещения подпружиненный дополнительный шток, на котором установлен основной ролик и подпружиненный рычаг, на одном конце которого установлен ролик для взаимодействия с основным роликом, а на другом - кулачок для взаимодействия с основным Н1ТОКОМ, KOTOpbiii снабжен флажко.м для взаимодействия с датчиком положения, установленным на ползуне, подпружиненном для взаимодействия с вто- рь1м клином клинового устройства подачи дополнительного суппорта. Второй клин обеспечивает увеличенную в два раза подачу ползуна. Компенсатор износа щлифоваль- Hoi o круга снабжен также размещенным на ползуне механизмом правки 1п,чифоваль- ного круга, устройство управления кот())ым включает дополнительно введенный измеритель износа, установленный параллельно основному, на щтоке дополнительного измерителя установлен датчик биени11 в виде свободно подвешенного на пружинах с флажком для взаимодействия с датчиком положения, и датчиком относительного положения дополнительного и основного измерителей, для взаимодействия с которым основной измеритель снабжен флажком. I з. п. ф-лы, 2 ил. i (Л со ;о 05
| Компенсатор износа шлифовального круга | 1984 |
|
SU1184652A1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
| Гребенчатая передача | 1916 |
|
SU1983A1 |
