Изобретение относится к электротехнике и может быть использовано для управления электродвигателей механизмов попорота экскаваторов.
Целью изобретения является повышение быстродействия и точности управления .
На чертеже представлена схема электропривода .
Электропривод содержит последовательно соединенные командоаппарат 1, задатчик 2 интенсивности, состоящий из входного усилителя 3 и задающего интегратора 4, пропорциональный регулятор 5 напряжения, пропорционально-интегральный регулятор 6 тока,управляемый преобразователь 7, выход которого предназначен для подключения к якорным цепям электродвигателей 8 и 9, датчик 10 напряжения, соединенный с регулятором напряжения, датчик 11 тока, терморезистор 12, соединенный с якорной цепью электродвигателей 8 и 9 и входом регулятора 6 тока.
В электропривод, кроме того,введены интег рирующая цепочка 13, первый нелинейный элемент 14 с зоной нечувствительности, вход которого соединен через интегрирующую цепочку 13 с выходом входного усилителя 3 задатчи- ка 2 интенсивности, а выход - с входом задающего интегратора 4,к второму входу которого подключен второй нелинейный элемент 15 с зоной нечувствительности, соединенный с датчиком 11 тока.
Выход регулятора 5 напряжения через третий нелинейный элемент 16 соединен с общей щиной и с входом четвертого нелинейного элемента 17,выход которого соединен с входом интегратора 4 задатчика 2 интенсивности. Электропривод работает следующим образом.
При любых перестановках командо- аппарата 1 задатчик 2 интенсивности задает темп изменения сигнала задания напряжения (скорости) электропривода, обеспечивающий ограничение
10
15
20
25
30
35
40
45
под действием напряжения датчика 11 тока на вход задающего интегратора 4 задатчика 2 интенсивности через первый нелинейный элемент 14 поступает дополнительный сигнал, который увеличивает темп нарастания задания до уровня, обеспечивающего ускорение, благоприятное для плавного око чания выбора зазора во втором валЬ- проводе механизма. Процесс окончания выбора зазоров фиксируется по времени заряда конденсатора интегрирующей цепочки 13 до напряжения,соо ветствующего ширине зоны нечувствительности первого нелинейного элемента 14.
При этом с выхода входного усилителя 3 через нелинейный элемент 14 на вход задающего интегратора 4 поступает дополнительный сигнал, который выводит задающее напряжение на заданный командоаппаратом 1 уровень за минимальное время. Далее задающий сигнал при работе регулятора 5 напряжения не изменяется и устройство работает с максимальным быстродействием.
Если в момент начала переходного процесса все зазоры выбраны, устройство в течение времени заряда конденсатора интегрирующей -цепочки огра ничивает ускорение уровнем, установленным для процесса окончания выбора второго зазора при неодинаковых начальных зазорах в валопроводах. В отсутствие выбора зазоров это уско рение обеспечивает ограничение dia/dt на допустимом уровне.
Если в переходном процессе при заданном задатчиком 2 ускорении ток якоря достигает стопорного значения то по цепи третьего нелинейного элемента 16 начинает протекать ток ста билизации задающего сигнала для рег лятора 6 тока. При неизменном сигнал задания тока ускорение ограничивается обратной связью по току и между сигналом задания напряжения и фактическим напряжением на двигател
ускорения по условиям плавного выбора 50 возникает рассогласование, которому
0
5
0
5
0
5
0
5
под действием напряжения датчика 11 тока на вход задающего интегратора 4 задатчика 2 интенсивности через первый нелинейный элемент 14 поступает дополнительный сигнал, который увеличивает темп нарастания задания до уровня, обеспечивающего ускорение, благоприятное для плавного окончания выбора зазора во втором валЬ- проводе механизма. Процесс окончания выбора зазоров фиксируется по времени заряда конденсатора интегрирующей цепочки 13 до напряжения,соответствующего ширине зоны нечувствительности первого нелинейного элемента 14.
При этом с выхода входного усилителя 3 через нелинейный элемент 14 на вход задающего интегратора 4 поступает дополнительный сигнал, который выводит задающее напряжение на заданный командоаппаратом 1 уровень за минимальное время. Далее задающий сигнал при работе регулятора 5 напряжения не изменяется и устройство работает с максимальным быстродействием.
Если в момент начала переходного процесса все зазоры выбраны, устройство в течение времени заряда конденсатора интегрирующей -цепочки ограничивает ускорение уровнем, установленным для процесса окончания выбора второго зазора при неодинаковых начальных зазорах в валопроводах. В отсутствие выбора зазоров это ускорение обеспечивает ограничение dia/dt на допустимом уровне.
Если в переходном процессе при заданном задатчиком 2 ускорении ток якоря достигает стопорного значения, то по цепи третьего нелинейного элемента 16 начинает протекать ток стабилизации задающего сигнала для регулятора 6 тока. При неизменном сигнале задания тока ускорение ограничивается обратной связью по току и между сигналом задания напряжения и фактическим напряжением на двигателе
0 возникает рассогласование, которому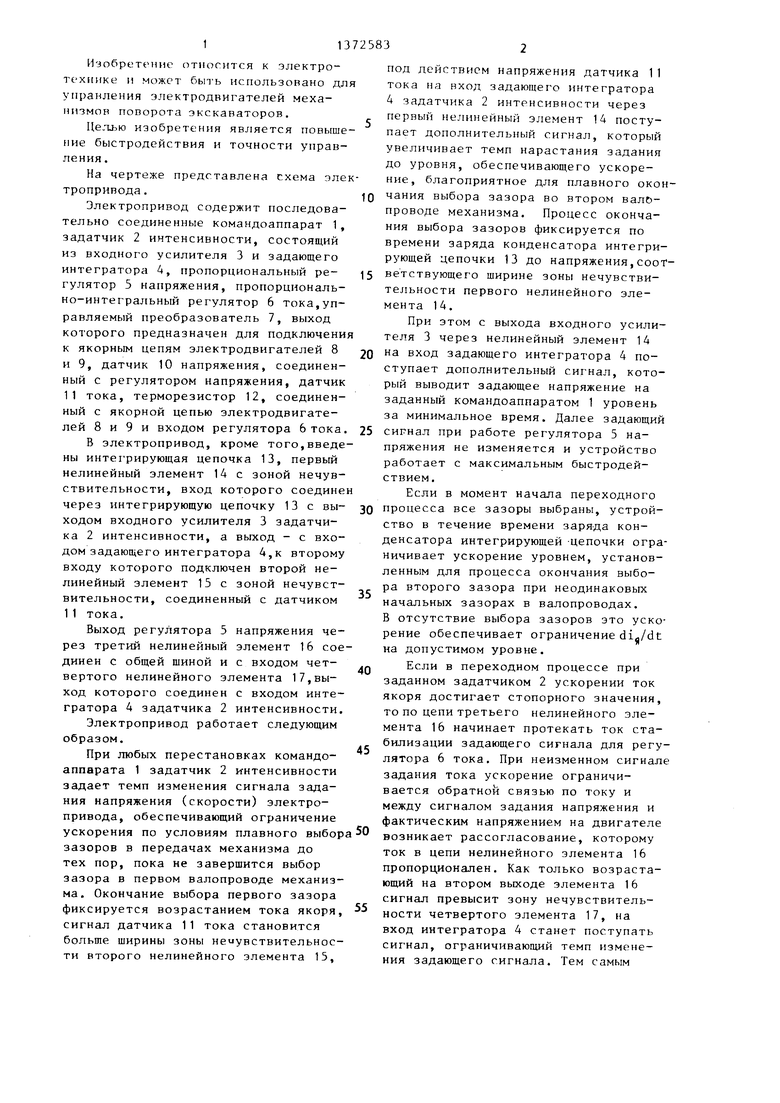
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления электроприводом одноковшового экскаватора и устройство для его осуществления | 1988 |
|
SU1629423A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Электропривод постоянного тока | 1991 |
|
SU1815785A1 |
| Электропривод постоянного тока шахтной подъемной установки | 1986 |
|
SU1324976A1 |
| Устройство программного управленияпРиВОдОМ КАНТОВАТЕля ОбжиМНОгОРЕВЕРСиВНОгО пРОКАТНОгО CTAHA | 1978 |
|
SU795597A1 |
| Устройство для частотного управления асинхронным двигателем | 1987 |
|
SU1457142A1 |
| Устройство для управления электроприводом одноковшового экскаватора | 1979 |
|
SU926181A1 |
| Система стабилизации натяжения подъемного каната экскаватора-драглайна | 1990 |
|
SU1768720A1 |
| Способ управления электроприводом экскаватора и устройство для его осуществления | 1990 |
|
SU1740573A1 |
| Электропривод постоянного тока | 1985 |
|
SU1304159A1 |
Изобретение относится к электротехнике и может быть использовано для управления электродвигателей механизмов поворота экскаваторов .Целью изобретения является повышение быстродействия и точности управления. Электропривод содержит первый нелинейный элемент 14, вход которого соединен через интегрирующую цепочку 13 с выходом входного усилителя 3. Выход нелинейного элемента 14 подключен к входу задающего интегратора 4. К второму входу задающего интегратора 4 подключен второй нелинейный элемент 15, соединенный с датчиком тока 1 1 . Выход регулятора напряжения 5 через третий нелинейный элемент 16 соединен с общей шиной и с входом четвертого нелинейного элемента 17. Выход четвертого нелинейного элемента 17 соединен с входом интегратора 4 задатчика интенсивности 2. В данном устройстве при любых перестановках командоаппарата 1 задатчик интенсивности 2 задает темп изменения сигнала задания напряжения электропривода, обеспечивающий ограничение ускорения по условиям плавного выбора зазора в передачах механизма. 1 ил. (Л оо to ел 00 00
зазоров в передачах механизма до тех пор, пока не завершится выбор зазора в первом валопроводе механизма. Окончание выбора первого зазора фиксируется возрастанием тока якоря, сигнал датчика 11 тока становится больше ширины зоны нечувствительности второго нелинейного элемента 15,
ток в цепи нелинейного элемента 16 пропорционален. Как только возрастающий на втором выходе элемента 16 сигнал превысит зону нечувствительности четвертого элемента 17, на вход интегратора 4 станет поступать сигнал, ограничивающий темп изменения задающего сигнала. Тем самым
возможные расхождения сигнала задания напряжения с сигналом, пропорциональным напряжению, ограничиваются уровнем, при котором во всех режимах работы любые перестановки командо- контроллера отрабатываются без запаздывания и обеспечивается точное ограничение ускорений в период выбора зазоров,
Формула изобретения
Многодвигательный электропривод механизма поворота экскаватора, со- , держащий последовательно соединенные командоаппарат, задатчик интенсивности, пропорциональный регулятор напряжения, пропорционально-интегральный регулятор тока, управляемый пре- образователь, к вькоду которого подключены последовательно соединенные якорные цепи электродвигателей,датчик напряжения, соединенный с регулятором напряжения, и датчик тока, о т- личающийс я тем, что,с целью повышения быстродействия и точности управления, в него введены безындук
тивный терморезистор с температурным коэффициентом сопротивления меди, четыре нелинейных элемента с зоной нечувствительности и интегрирующая цепь, а задатчик интенсивности выполнен регулируемым и образован последовательно соединенными усилителем и интегратором, охваченными обратной связью с выхода интегратора на вход усилителя, при этом вход регулятора тока через терморезистор подключен к обмотке дополнительных полюсов в якорной цепи одного из электродвига- телейг, выход усилителя в задатчике интенсивности дополнительно соединен с входом интегратора через последовательно включенные интегрирующую цепь и первый нелинейный элемент, выход датчика тока через второй нелинейный элемент подключен к входу интегратора задатчика интенсивности, выход регулятора напряжения через третий нелинейный элемент соединен с общей шиной и с входом четвертого нелинейного элемента, вькод которого соединен с входом интегратора задатчика интенсивности.
| Ключев В.И., Терехов В.М | |||
| Электропривод и автоматизация общепромышленных механизмов | |||
| Изд-во .Энергия, 1980, с | |||
| Контрольный стрелочный замок | 1920 |
|
SU71A1 |
| Устройство для управления электроприводом механизма поворота | 1983 |
|
SU1089745A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
