--
)А4
-(
Ql
28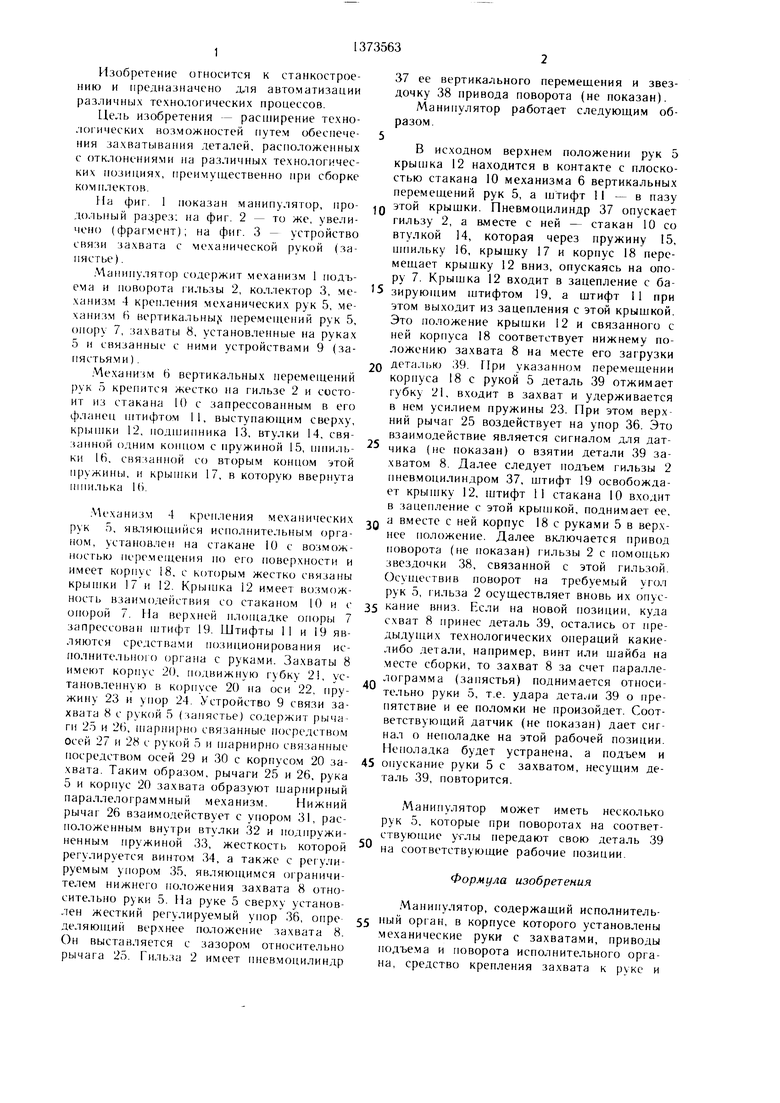
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1979 |
|
SU837857A1 |
| Установка для изготовления биметаллических деталей | 1982 |
|
SU1069941A1 |
| Микроманипулятор для установки узлов механизма часов | 1982 |
|
SU1083154A1 |
| Автомат для отгибки зацепов пружин растяжения | 1989 |
|
SU1641491A1 |
| ЗАХВАТ ДЛЯ ПОДЪЕМА И ПЕРЕМЕЩЕНИЯ АМПУЛ С ПУЧКАМИ ОТРАБОТАВШИХ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ | 2018 |
|
RU2684394C1 |
| Автоматическая линия безоблойной штамповки | 1980 |
|
SU889482A1 |
| Исполнительный орган сборочного манипулятора | 1980 |
|
SU961939A1 |
| Устройство для сборки деталей | 1987 |
|
SU1535691A1 |
| Манипулятор | 1981 |
|
SU1050860A1 |
| Манипулятор | 1991 |
|
SU1813620A1 |
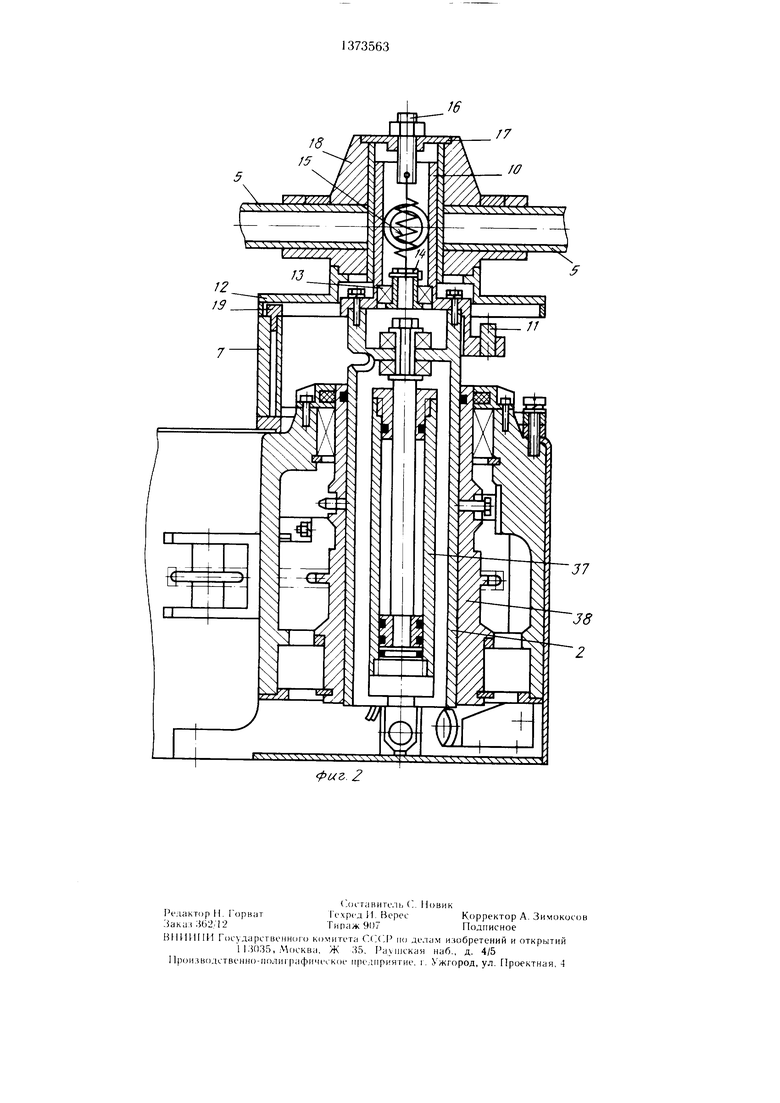
Изобретение отноеится к области станкостроения. Цель изобретения - расширение технологических возможностей путем обеспечения захватывания деталей, расположенных с отклонением на различных технологических позициях, преимущественно при сборке комплектов. Захват крепится к руке 5 с помощью шарнирного параллело- граммного механизма, состоящего из рычагов 25 и 26, осей 27, 28, расположеин|,1х на руке 5, и осей 29, 30, расположенных на корпусе 20 захвата, а также упоров 31, Зп. расположенных по оси си.мметрии утого мс ханпзма, и упора 36, смеп1енного с :)то{( оси При опускании руки на технологической позиции, например на позиции загрузки, за хват натыкается на деталь 39, рыча: 25 при этом воздействует на упор 36, который ;uioi сигнал о взятии детали. 1Чтул1 рон()чпым перемеп ением упора 35 переметают рычаг 26 шарнирного параллелог раммного меха низма, в результате чего изменяется IKI.IO женис захвата относительно руки о. 3 и,,
фиг
Изобретение относится к станкостроению и предназначено для автоматизации различных технологических процессов.
Цель изобретения - расширение технологических возможностей путем обеспечения захватывания деталей, расположенных с отклонениями на различных технологических позициях, преимущественно при сборке комплектов.
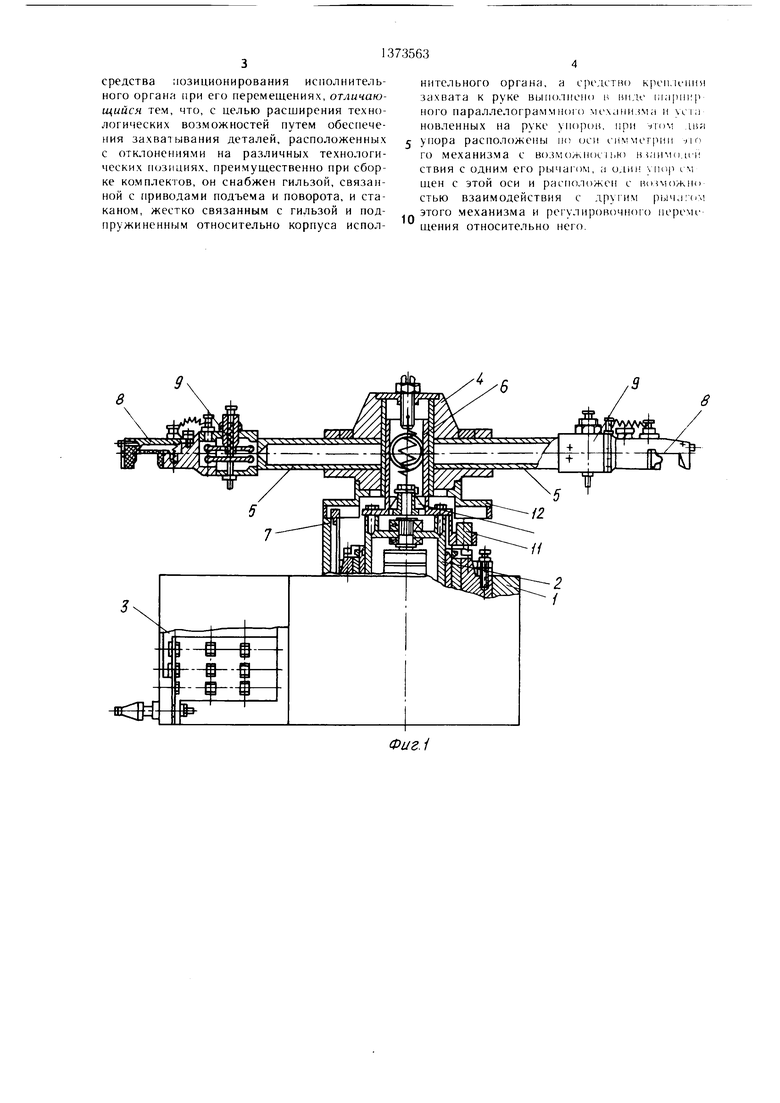
На фиг. 1 показан манипулятор, про- дольпый разрез; на фиг. 2 - то же, увеличено (фрагмент); на фиг. 3 - устройство связи захвата с механической рукой (запястье) .
Манипулятор содержит механизм 1 подъема и поворота гильзы 2, коллектор 3, механизм 4 крепления механических рук 5, механизм 6 вертикальны перемещений рук 5, опору 7, захваты 8, установленные на руках 5 и связанные с ними устройствами 9 (запястья.ми ).
Механизм 6 вертикальных перемещений рук 5 крепится жестко на гильзе 2 и состоит из стакана К) с запрессованным в его фланец штифтом II, выступающим сверху, крьипки 12, подн ипника 13, втулки 14, связанной одним концом с пружиной 15, ппжль- ки 16, связанной со вторым концом пружин), и крып1ки 17, в которую ввернута П11П1Лька 16.
Механиз.м 4 крепления механических рук 5, яв. 1ЯЮ1Цийся исполните. 1ьным органом, установлен на стакане 10 с возмож- нск гью перемепхения но егч) поверхности и имеет корпус 18, с которым жестко связаны крьппки 17 и 12. Крышка 12 имеет возможность взаимодействия со стаканом К) и с опорой 7. На верхней нлоп1адке опоры 7 запрессован штифт 19. Штифты 11 и 19 являются средствами позиционирования исполнительного органа с руками. Захваты 8 имеют корпус 20, подвижр1ую губку 21, установленную в корпусе 20 на оси 22, пружину 23 и упор 24. Устройство 9 связи захвата 8 с рукой 5 (запястье) содержит рычаги 25 и 2t), Hiapini Ho связанные посредством осей 27 и 28 с рукой 5 и п арнирно связанные посредством осей 29 и 30 с корпусом 20 захвата. Таким образом, рычаги 25 и 26, рука 5 и корпус 20 захвата образуют шарнирный параллелограммный механизм. Нижний рычаг 26 взаимодействует с упором 31, расположенным внутри втулки 32 и подпружиненным пружиной 33, жесткость которой регулируется винтом 34, а также с регулируемым упором 35, являющимся ограничителем нижнего положения захвата 8 относительно руки 5. На руке 5 сверху установлен жесткий регулируемый упор 36, опре деляюн|ий верхнее положение захвата 8. Он выставляется с зазоро.м относительно рычага 25. Гильза 2 имеет пневмоцилиндр
37 ее вертикального перемещения и звездочку 38 привода поворота (не показан).
Манипулятор работает следующим образом.
В исходном верхнем положении рук 5 крышка 12 находится в контакте с плоскостью стакана 10 механизма 6 вертикальных перемещений рук 5, а HJтифт II - в пазу
Q этой крышки. Пневмоцилиндр 37 опускает гильзу 2, а вместе с ней - стакан 10 со втулкой 14, которая через пружину 5, ннжльку 16, крышку 17 и корпус 18 перемещает крыщку 12 вниз, опускаясь на опору 7. Крышка 12 входит в зацепление с ба5 зируюп1им штифтом 19, а штифт 11 при этом выходит из зацепления с этой крышкой. Это положение крышки 12 и связанного с ней корпуса 18 соответствует нижнему положению захвата 8 на месте его загрузки
0 дета.П)Ю 39. При указанном пере.мешении корпуса 18 с рукой 5 деталь 39 отжимает губку 21, входит в захват и удерживается в нем усилием пружины 23. При это.м верхний рычаг 25 воздействует на упор 36. Это взаи.модействие является сигналом для дат чика (не показан) о взятии детали 39 захватом 8. Далее следует подъем гильзы 2 пнев.моцилиндром 37, штифт 19 освобождает крьпнку 12, штифт 11 стакана 10 входит в зацепление с этой крышкой, поднимает ее,
Q а вместе с ней корпус 18 с руками 5 в верхнее положение. Далее включается привод поворота (не показан) гильзы 2 с помопхью звездочки 38, связанной с этой гильзой. Осуществив поворот на требуемый угол рук 5, г ильза 2 осуществляет вновь их опус5 кание вниз. Если на новой позиции, куда схват 8 принес деталь 39, остались от предыдущих технологических операций какие- либо детали, например, винт или шайба на .месте сборки, то захват 8 за счет параллелограмма (запястья) поднимается относительно руки 5, т.е. удара детали 39 о препятствие и ее поломки не произойдет. Соот- ветствуюший датчик (не показан) дает сигнал о неполадке на этой рабочей позиции. Неполадка будет устранена, а подъем и
5 опускание руки 5 с захватом, несушим деталь 39, повторится.
0
50
Манипулятор может иметь несколько рук 5, которые при поворотах на соответствующие утлы передают свою деталь 39 на соответствуюшие рабочие позиции.
Формула изобретения
Манипулятор, содержащий исполнитель- ный орган, в корпусе которого установлены механические руки с захватами, приводы подъема и поворота исполнительного органа, средство кренления захвата к руке и
средства позиционирования исполнительного органа фи его перемещениях, отличающийся тем, что, с целью расширения технологических возможностей путем обеспечения захва1ывания деталей, расположенных с отклонениями на различных технологических позициях, преимущественно при сборке комплектов, он снабжен гильзой, связанной с приводами подъема и поворота, и стаканом, жестко связанным с гильзой и подпружиненным относительно корпуса испол
нительного органа, а средство крепления захвата к руке выполнено и ви.и- шлриир ноге параллелограммного ,ш;1 и vcni новленных на руке упоров, при тиом .iiwi упора расположены IID CJCH CIIN; могрии -я о го механизма с возможное i ью в ianMd.tfi ствия с одним его рычагом, а один чпор см щен с этой оси и расположен с вошожнк стью взаимодействия с другим рычл Ол этого механизма и регулировочного щения относительно пего.
Фuг.i
puz. Z
/7
| Промышленные роботы | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| М.: ВНИИМаш, 1982, с | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
