(21)А102367/25-28
(22)10.06.86
(46) 15.02.88. Бюл. № 6
(72) А.М.Копытин, В.А.Маковкин
и В.И.Ситников
(53)621.837 (088.8)
(56)Авторское свидетельство СССР № 1149089. кл. F 16 Н 21/04, 1983.
(54)КРИВОШИПНЫЙ МЕХАНИЗМ С ОСТАНОВКАМИ
(57)Изобретение относится к машиностроению, а именно к шарнирно-рычаж- ным механизмам. Цель изобретения - расширение кинематических возможностей путем увеличения диапазона регулирования углов поворота КРИВОшипа. Поставленная цель достигается в результате выполнения регулируемого упора 4 в виде сопряженных основного и дополнительного V-образных упоров 6 и 7 соответственно, рабочие участки которых взаимодействуют с цилиндрическим упором 3, размещенным на плече кривошипа 2 с возможностью осевого перемещения. При повороте кривошипа 2 в зависимости от углов его поворота и соответствующего этим углам перемещения регулируемого упора 4 цилиндрический упор 3 взаимодействует с рабочими участками основного или дополнительного V-образных упоров 6 и 7, а кривошип 2 совершает кинематически точные остановки. 6 ил.
L.
с в
(Л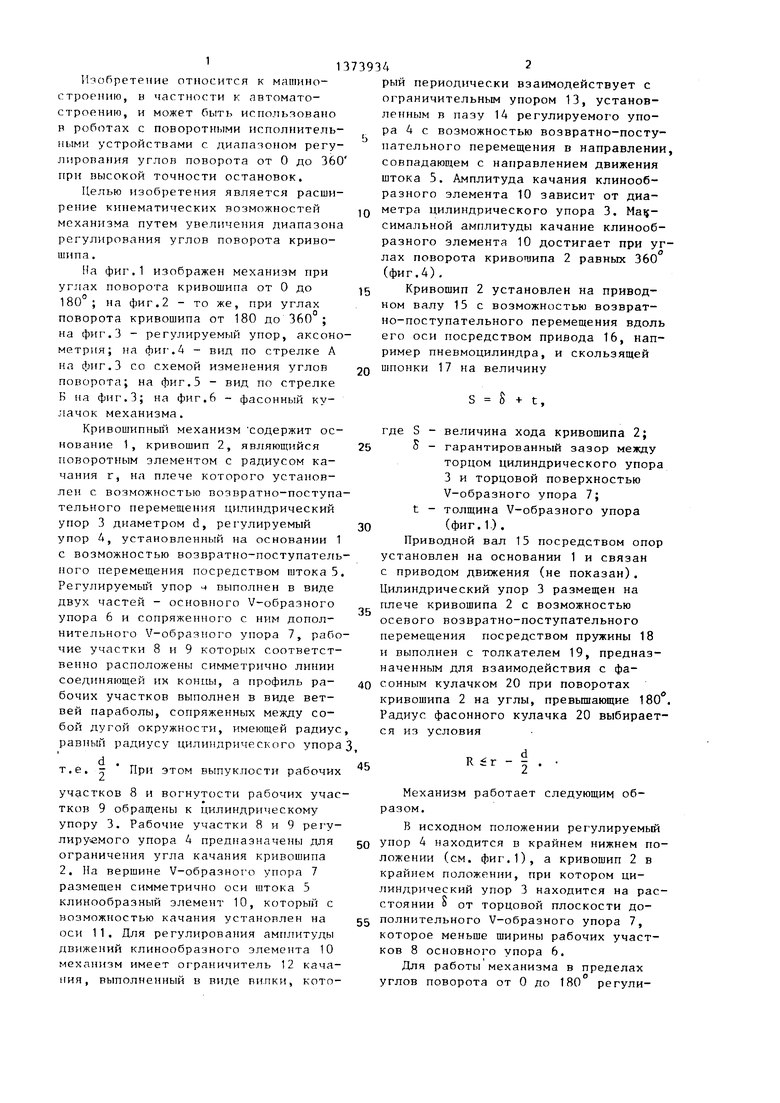
| название | год | авторы | номер документа |
|---|---|---|---|
| Мальтийский механизм автооператора | 1985 |
|
SU1273669A1 |
| СПОСОБ И МЕХАНИЗМ В.И. ПОЖБЕЛКО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ВРАЩЕНИЯ С ОСТАНОВКАМИ | 2003 |
|
RU2249133C1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| СТАНОК ДЛЯ ОБРАБОТКИ КОЛЬЦЕВОГО ЖЕЛОБА | 1969 |
|
SU249232A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333828C1 |
| Устройство для подачи длинномерного материала в зону обработки | 1990 |
|
SU1731372A1 |
| УСТРОЙСТВО ДЛЯ ГРУППОВОЙ УКЛАДКИ ПРЕДМЕТОВ | 2001 |
|
RU2220888C2 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ПРЕДМЕТОВ В ТАРУ | 1996 |
|
RU2138425C1 |
| УСТРОЙСТВО ДЛЯ ГРУППОВОЙ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В ТАРУ | 2006 |
|
RU2313478C1 |
| СТАНОК ДЛЯ ГИБКИ ИЗДЕЛИЙПРОКАТА | 1971 |
|
SU320326A1 |

ГО
f}ufl
Изобретение относится к машиностроению, в частности к автомато- строению, и может быть испольяоватю в роботах с поворотными исполнительными устройствами с диапазоном регулирования углов поворота от О до 360 при высокой точности остановок.
Целью изобретения является расширение кинематических возможностей механизма путем увеличения диапазона регулирования углов поворота кривошипа ,
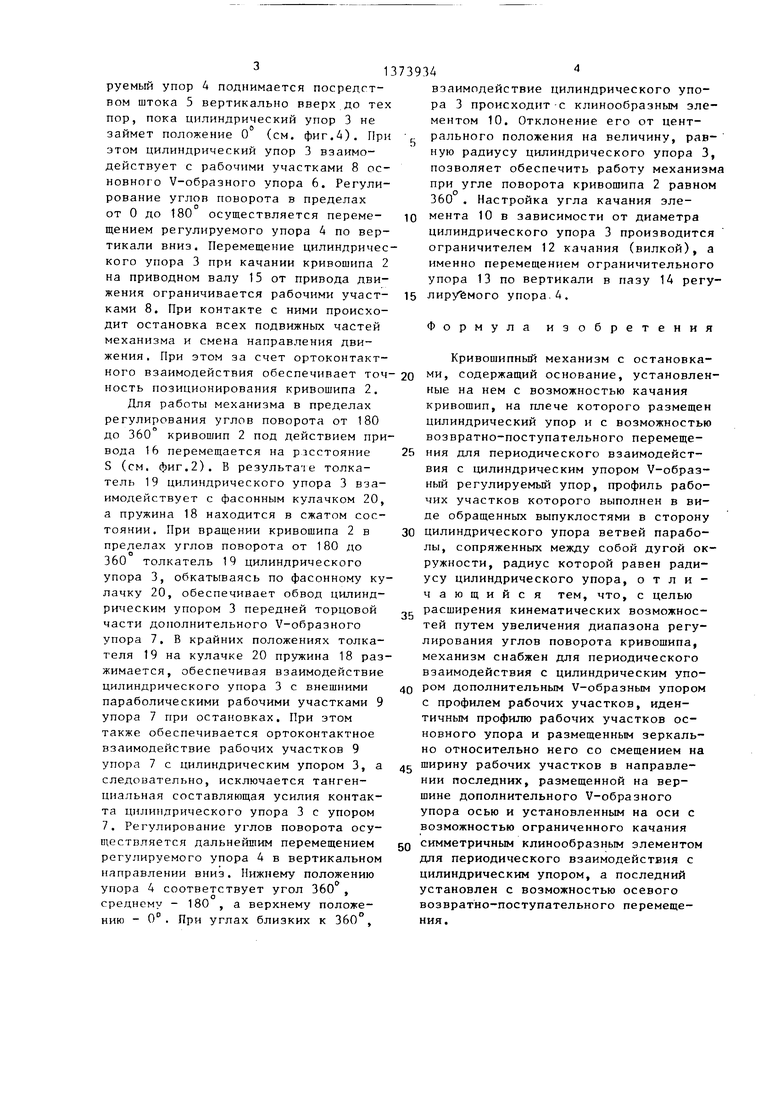
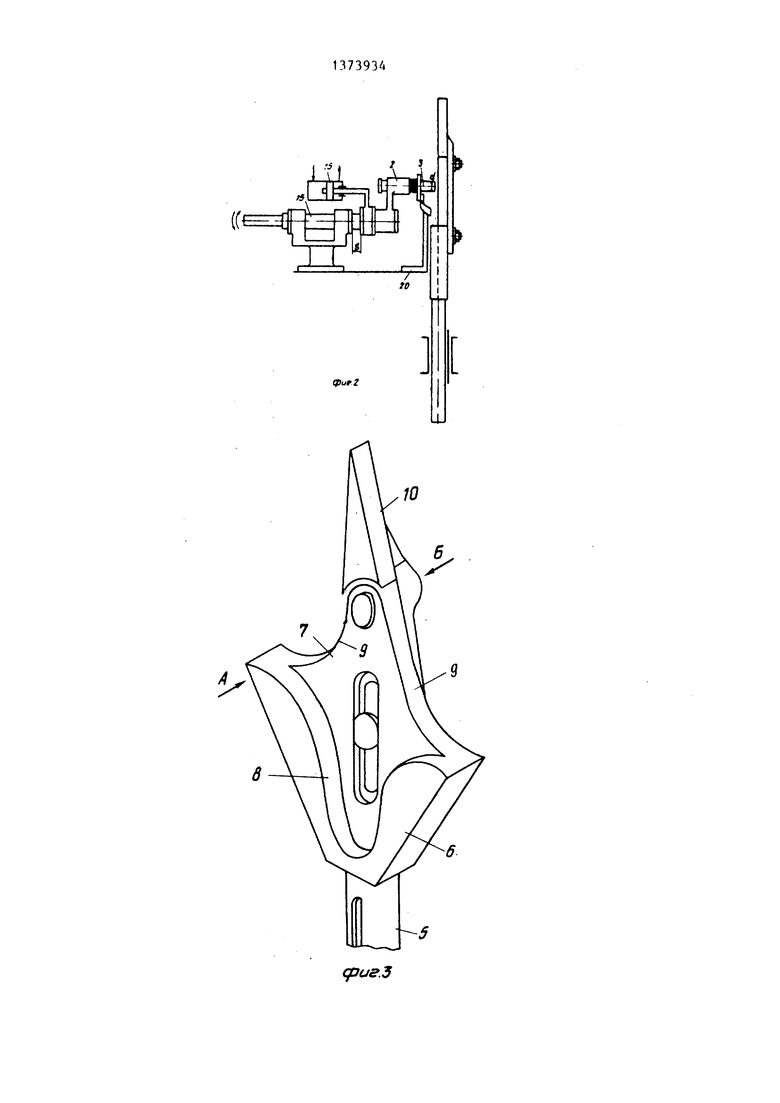
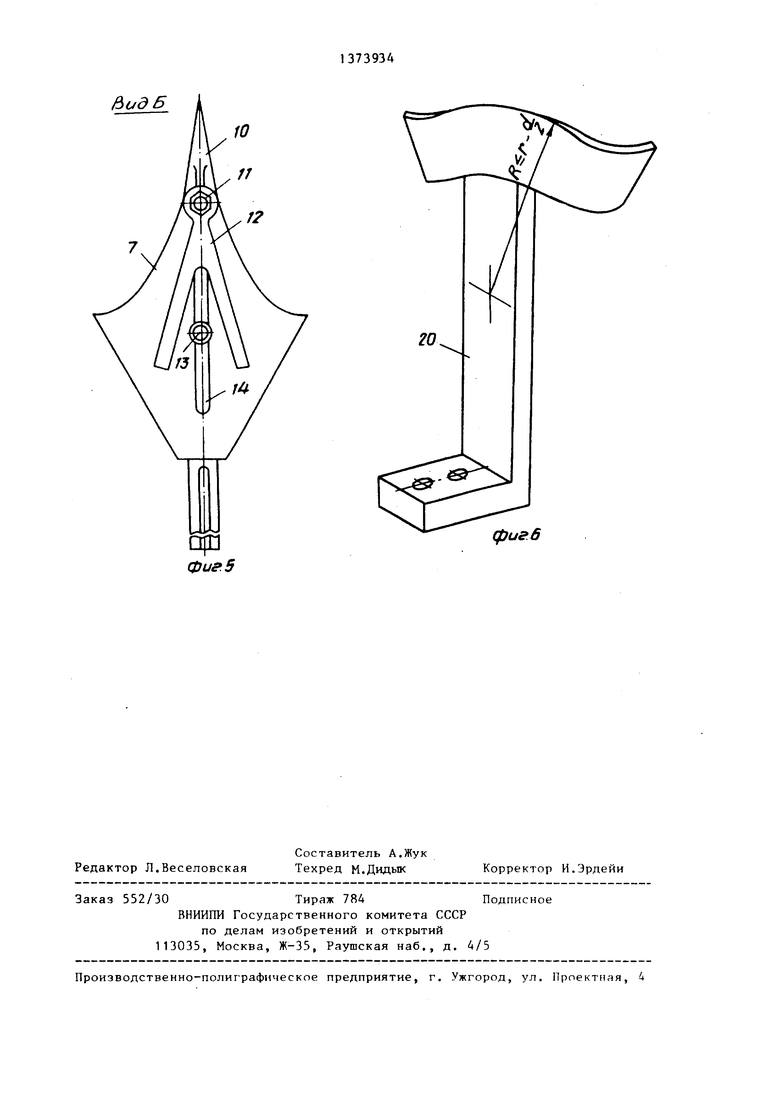
На фиг.1 изображен механизм при углах поворота кривошипа от О до 180 ; на фиг.2 - то же, при углах поворота кривошипа от 180 до 360 ; на фиг.З - регулируемый упор, аксонометрия; на фиг . 4 - вид по стрелке А на фиг.З со схемой изменения углов поворота; на фиг.З - вид по стрелке Б на фиг.З; на фиг.6 - фасонный кулачок механизма.
Кривошипный механизм содержит основание 1, кривошип 2, являющийся поворотным злементом с радиусом качания г, на плече которого установлен с возможностью возвратно-поступательного перемещения цилиндрический упор 3 диаметром d, регулируемый упор 4, установленный на основании 1 с возможностью возвратно-поступатетгь- ного перемещения посредством штока 5. Регулируемьп упор ч выполнен в виде двух частей - основного V-образного упора 6 и сопряженного с ним дополнительного V-образного упора 7, рабочие участки 8 и 9 которых соответственно расположены симметрично линии соединяющей их концы, а профиль рабочих участков выполнен в виде ветвей параболы, сопряженных между собой дугой окружности, имеющей радиус равный радиусу цилиндрического упора
т.е. При этом выпуклости рабочих
участков 8 и вогнутости рабочих участков 9 обращены к цилиндрическому упору 3. Рабочие участки 8 и 9 регу- лиру1емого упора 4 предназначены для ограничения угла качания кривошипа 2. На вершине V-образного упора 7 размещен симметрично оси штока 5 клинообразный элемент 10, который с возможностью качания установлен на оси 11. Для регулирования амплитуды движений клинообразного элемента 10 механизм имеет ограничитель 12 качания, выполненный в виде вилки, кото
рый периодически взаимодействует с ограничительным упором 13, установленным в пазу 14 регулируемого упора 4 с возможностью возвратно-поступательного перемещения в направлении, совпадающем с направлением движения штока 5. Амплитуда качания клинообразного элемента 10 зависит от диаметра цилиндрического упора 3. Ма(- симальной амплитуды качание клинообразного элемента 10 лах поворота (фиг.4),
Кривошип 2 установлен на приводном валу 15 с возможностью возвратно-поступательного перемещения вдоль его оси посредством привода 16, например пневмоцилиндра, и скользящей шпонки 17 на величину
достигает при уг- кривошипа 2 равных 360
S S
t.
5
0
5
0
где
t величина хода кривошипа 2;
гарантированный зазор между
торцом цилиндрического упора
3 и торцовой поверхностью
V-образного упора 7;
толщина V-образного упора
(фиг. 1.).
Приводной вал 15 посредством опор установлен на основании 1 и связан с приводом движения (не показан). Цилиндрический упор 3 размещен на плече кривошипа 2 с возможностью осевого возвратно-поступательного перемещения посредством пружины 18 и выполнен с толкателем 19, предназначенным для взаимодействия с фасонным кулачком 20 при поворотах кривошипа 2 на углы, превышающие 180 . Радиус фасонного кулачка 20 выбирается из условия
45
2
Механизм работает следующим образом.
В исходном положении регулируемый упор 4 находится в крайнем нижнем положении (см. фиг.1), а кривошип 2 в крайнем положении, при котором цилиндрический упор 3 находится на расстоянии S от торцовой плоскости до- полнительного V-образного упора 7, которое меньше ширины рабочих участков 8 основного упора 6.
Для работы механизма в пределах углов поворота от О до 180 регулируемый упор 4 поднимается посредством штока 5 вертикально вверх до тех пор, пока цилиндрический упор 3 не займет положение О (см. фиг.4). При
рование углов поворота
от О до 180 осуществляется
этом цилиндрический упор 3 взаимодействует с рабочими участками 8 основного V-образного упора 6. Регулив пределах
перемещением регулируемого упора 4 по вертикали вниз. Перемещение цилиндрического упора 3 при качании кривошипа 2 на приводном валу 15 от привода движения ограничивается рабочими участками 8. При контакте с ними происходит остановка всех подвижных частей механизма и смена направления движения. При этом за счет ортоконтакт- ного взаимодействия обеспечивает точ ность позиционирования кривошипа 2.
Для работы механизма в пределах регулирования углов поворота от 180 до 360° кривошип 2 под действием привода 16 перемещается на расстояние S (см. фиг.2). В результате толкатель 19 цилиндрического упора 3 взаимодействует с фасонным кулачком 20, а пружина 18 находится в сжатом состоянии. При вращении кривощипа 2 в пределах углов поворота от 180 до 360 толкатель 19 цилиндрического упора 3, обкатываясь по фасонному кулачку 20, обеспечивает обвод цилиндрическим упором 3 передней торцовой части дополнительного V-образного упора 7, В крайних положениях толкателя 19 на кулачке 20 пружина 18 раз
жимается, обеспечивая взаимодействие цилиндрического упора 3 с внешними параболическими рабочими участками 9 упора 7 при остановках. При этом также обеспечивается ортоконтактное взаимодействие рабочих участков 9 упора 7 с цилиндрическим упором 3, а следовательно, исключается тангенциальная составляющая усилия контакта цилиндрического упора 3 с упором 7. Регулирование углов поворота осуществляется дальнейшим перемещением регулируемого упора 4 в вертикальном направлении вниз. Нижнему положению упора 4 соответствует угол 360 , среднему - 180 , а верхнему положению - 0°. При углах близких к 360 ,
взаимодействие цилиндрического упора 3 происходит-с клинообразным элементом 10. Отклонение его от центрального положения на величину, равную радиусу цилиндрического упора 3, позволяет обеспечить работу механизма при угле поворота кривошипа 2 равном 360 . Настройка угла качания элемента 10 в зависимости от диаметра цилиндрического упора 3 производится ограничителем 12 качания (вилкой), а именно перемещением ограничительного упора 13 по вертикали в пазу 14 регу- лируёмого упора,4.
Формула изобретения
0
5
0
5
Кривошипный механизм с остановками, содержащий основание, установленные на нем с возможностью качания кривошип, на плече которого размещен цилиндрический упор и с возможностью возвратно-поступательного перемещения для периодического взаимодействия с цилиндрическим упором V-образ- ный регулируемый упор, профиль рабочих участков которого выполнен в виде обращенных выпуклостями в сторону цилиндрического упора ветвей параболы, сопряженных между собой дугой окружности, радиус которой равен радиусу цилиндрического упора, отличающийся тем, что, с целью расширения кинематических возможностей путем увеличения диапазона регулирования углов поворота кривошипа, механизм снабжен для периодического взаимодействия с цилиндрическим упоQ ром дополнительным V-образным упором с профилем рабочих участков, идентичным профилю рабочих участков основного упора и размещенным зеркально относительно него со смещением на
с ширину рабочих участков в направлении последних, размещенной на вершине дополнительного V-образного упора осью и установленным на оси с возможностью ограниченного качания
Q симметричным клинообразным элементом для периодического взаимодействия с цилиндрическим упором, а последний установлен с возможностью осевого возвратно-поступательного перемещения.
сригЗ
10
L/dA
фигЛ
идБ
фиг 6
