.J
1
Изобретение относится к автоматике и вычислительной технике и может быть использовано на складах,оснащенных кранами-штабелерами.
Цель изобретения - повышение производительности объекта управления за счет изменения скорости его перемещения пропорционально разности заданного и текущего адресов.
На чертеже приведена схема устройства.
Устройство содержит блок 1 задания адреса, датчик 2 текущего адреса, генератор 3 тактовых импульсов, делители 4 и 5 частоты, счетчики 6 и 7, группы 8 и 9 элементов И, элементы ИЛИ 10 и 11, группу 12 элементов ИЛИ, регистр 13, блок 14 включения реле привода, электропривод 15, блок 16 торможения.
Устройство работает следующим образом.
G использованием блока 1 задания адреса устанавливается адрес желаемого положения транспортного объекта, при этом на выходе блока 1 генерируется код желаемого адреса, датчик 2 на выходе генерирует код текущего адреса транспортного средства. Генератор 3 генерирует импульс с постоянной частотой. Под действием кода с выхода блока 1 делителем 4 частота импульса на его выходе понижается пропорционально коду блока 1. Под действием кода с выхода датчика 2 делителем 5 частота импулсов на его выходе понижается пропорционально коду счетчика 2. Счетчико 6 импульсы с выхода делителя 4 суммируются, а счетчиком 7 суммируются импульсы с выхода делителя 5. По достижении содержимого одного из счетчиков 6 или 7, при котором на выходе (п-1)-го разряда устанавливается высокий потенциал, передним фронтом импульса высокого потенциала с выхода (n-l)-ro счетчика 6 или 7 через элемент ИЛИ 10 регистр 13 обнуляется,а по достижении содержимого одного из счетчиков 6 или 7, при котором на выходе п-го разряда устанавливается высокий потенциал, фиксируется по входу ввода знака отклонения в регистре 13 знак Направления перемещения объекта, открывается одна из групп 9 или 8 эле ментов И соответственно и содержимо счетчика 7 или 6, того, содержимое
0
5
0
5
0
которого меньше, через группу 9 или 8 элементов И и через группу 12 элементов ИЛИ поступает на входы ввода модуля отклонения регистра 13.Затем импульсом с выхода п-го разряда через элемент ИЛИ 11 счетчики 6 и 7 обнуляются, в них вновь повторяется процесс подсчета импульсов, поступающих на. счетные входы.
Содержимое регистра 13 поступает на входы блока 14, выполняющего функции преобразователя код-аналог. При неравенстве срдержимого счетчиков в момент появления высокого потенциала на выходе п-го разряда на одном из входов ввода знака отклонения регистра 13 будет высокий потенциал,а на другом - низкий.Ана- , логичная картина наблюдается и на выходах регистра, а на входах ввода модуля отклонения регистра 13 будет код модуля отклонения текущего адреса объекта от желаемого адреса. Этот код, зафиксированный в регистре 13, подается в блок 14. Код знака преобразуется в блоке 14 в полярность выходного напряжения или тока, а код модуля - в его аналоговый эквивалент.
Двигатель 15 в соответствии с полярностью и амплитудой выходного сигнала с блока 14 развивает момент вращения в направлении, определяемом полярностью, и по величине,пропорциональной амплитуде входного сигнала, сигнал на входе блока 16 при этом отсутствует.При уменьшении модуля отклонения, т.е. при уменьшении разницы между заданным адресом и текущим его значением,код модуля уменьшается, а следовательно, и ско- . рость вращения вала двигателя 15 уменьшается.При достижении объектом заданного адреса на выходах п-го разряда счетчиков 6 и 7 одновременно устанавливаются высокие потенциалы, тогда на входе двигателя 15 сигнал по модулю равен нулю, а на входе блока 16 торможения он оказывается высоким.Под действием высокого потенциала блок 16 срабатывает и застопоривает объект в заданном положении в точке с заданным адресом.
5 Формула изобретения
Устройство для управления позиционированием транспортного средства содержащее блок задания адреса, дат5
0
5
0
чик текущего адреса, первый счетчик две группы элементов И, два элемента ИЛИ, блок включения реле привода, выход которого является выходом устройства, от.личающееся тем, что, с целью повышения производительности объекта управления за счет изменения скорости его перемещения пропорционально разности заг данного и текущего адресов, в него введены два делителя частоты,второй счетчик, группа элементов ИЛИ,регистр и генератор тактовых импульсов выход которого соединен с информа- ционными входами первого и второго делителей частоты, выходы блока задания адреса Соединены соответственно с установочными входами первого делителя частоты, выход которого со- единен с счетным входом первого счетчика, выход датчика текуп1его адреса соединен с установочными входами второго делителя частоты, выход которого соединен с счетным входом второго счетчика, первые входы элементов ИЛИ группы соединены с выходами элементов И первой группы,вторые входы элементов ИЛИ группы соединены с выходами элементов И второй группы, выходы элементов ИЛИ группы соединены с информационными входам регистра, выход которого соединен с входом блока включения реле привода, выходы разрядов первого счетчика соединены с первыми входами элементов И первой группы, выхода разрядов второго счетчика соединены с первыми входами элементов И второй группы, выходы предпоследних разрядов первого и второго счетчиков соединены с первым и вторым входами первого элемента ИЛИ соответственно, выход которого соединен с установочным входом регистра, выходы последних разрядов первого и второго счетчиков соединены с входами признаков Больше и Меньше регистра и к входам второго элемента ИЛИ соответственно, выход которого соединен с установочными входами первого и второго счетчиков, выход последнего разряда первого счетчика соединен с вторыми входами элементов И второй группы, выход последнего разряда второго счетчика-соединен с вторыми входами элементов И первой группы.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО КОНТРОЛЯ | 1991 |
|
RU2015523C1 |
| Генератор случайных процессов | 1981 |
|
SU985786A1 |
| Устройство для контроля физического состояния биологических объектов | 1986 |
|
SU1336034A1 |
| Устройство для диагностирования аппаратуры обработки данных | 1985 |
|
SU1390610A1 |
| Устройство для программного регулирования | 1988 |
|
SU1571550A1 |
| Устройство для программного управления шпинделем | 1987 |
|
SU1511735A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РЕАБИЛИТАЦИЕЙ ФУНКЦИЙ МЫШЦ ЧЕЛОВЕКА | 1999 |
|
RU2153363C1 |
| Цифровой генератор | 1986 |
|
SU1347164A1 |
| Устройство для программного контроля | 1987 |
|
SU1464142A1 |
| Преобразователь угла поворота вала в код | 1991 |
|
SU1833966A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано на складах, оснащенных кранами-штабелерами.Цель изобретения - повьппение производительности объекта управления за счет изменения скорости его перемещения пропорционально разности заданного и текущего адресов. С этой целью в устройство, содержащее блок 1 задания адреса, датчик 2 текущего адреса, счетчик 6, группы 8,9 элементов И, элементы ИЛИ 10, 11 и блок 14 включения реле, введены делители 4,5 частоты, счетчик 7, группа 12 элементов ИЛИ, регистр 13 и генератор 3 тактовых импульсов с соответствующими связями.1 ил. (Л С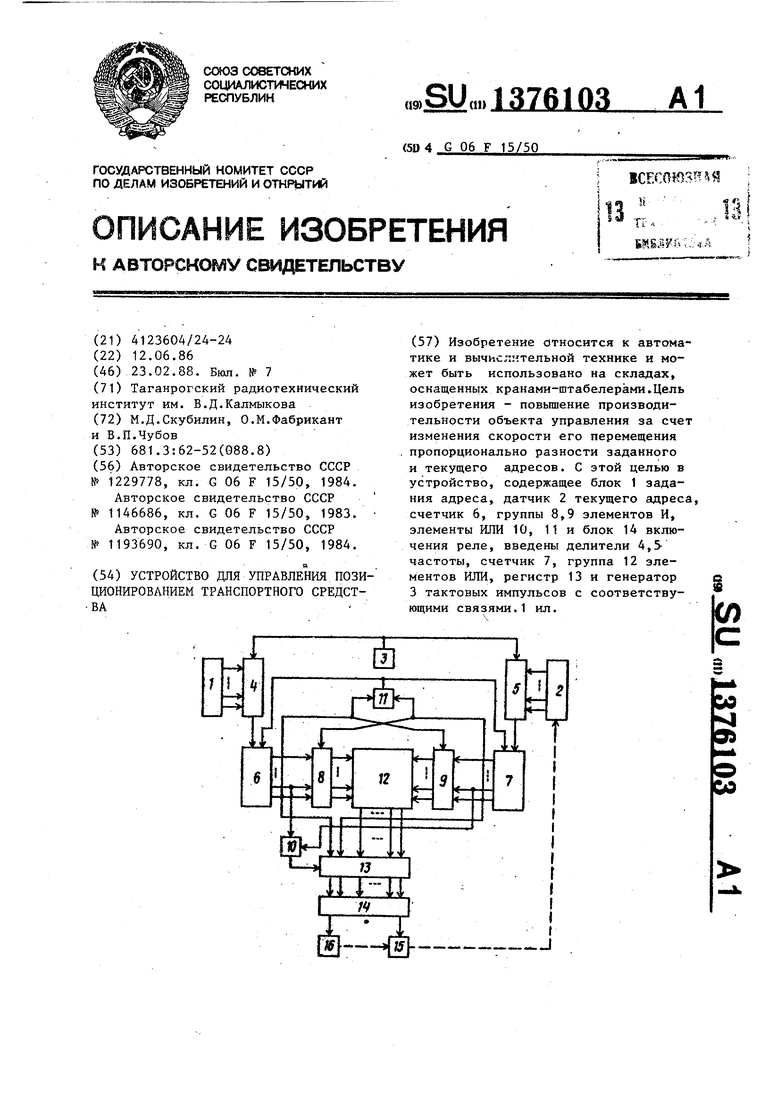
| Устройство для автоматического адресования транспортного средства | 1984 |
|
SU1229778A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Авторское свидетельство СССР f 1146686, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для управления приводом кранштабелера | 1984 |
|
SU1193690A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
