Изобретение относится к области автоматики и вычислительной техники .и может найти применение в системах числового программного управления станками, в которых требуется управлять скоростью вращения шпинделя, а также поддерживать заданную в программе скорость резания при переменном радиусе обработки
Цель изобретения - повьшение быстродействия и упрощение устройства о
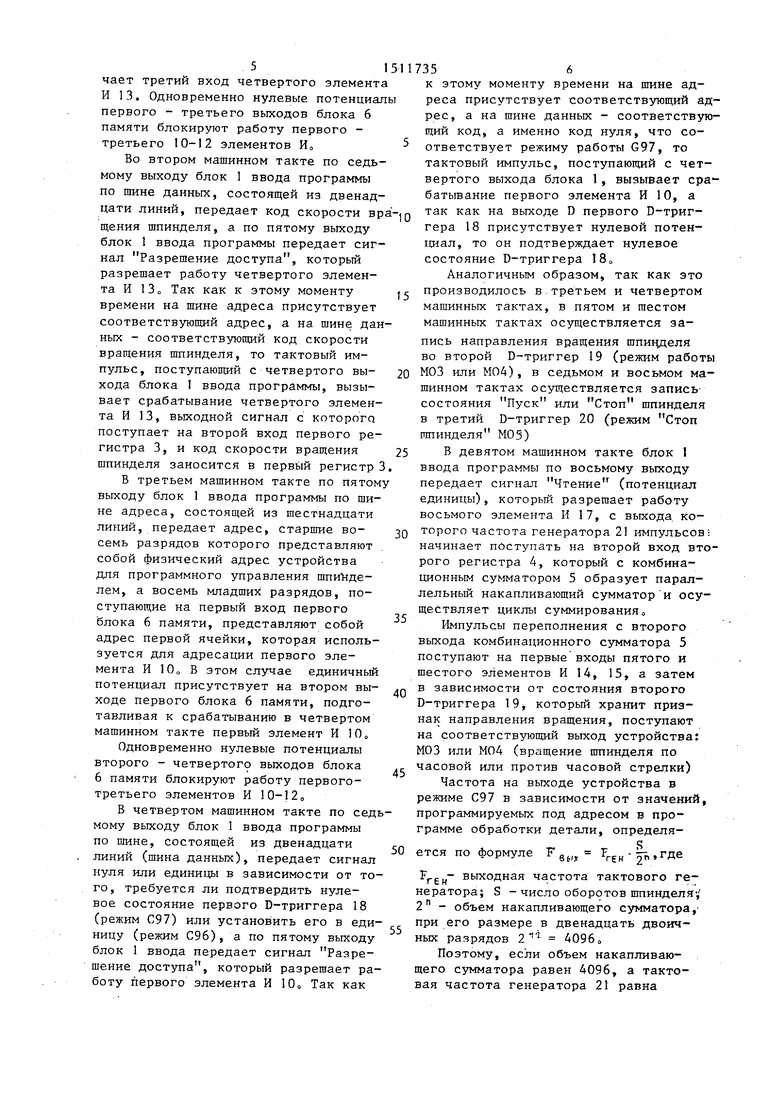
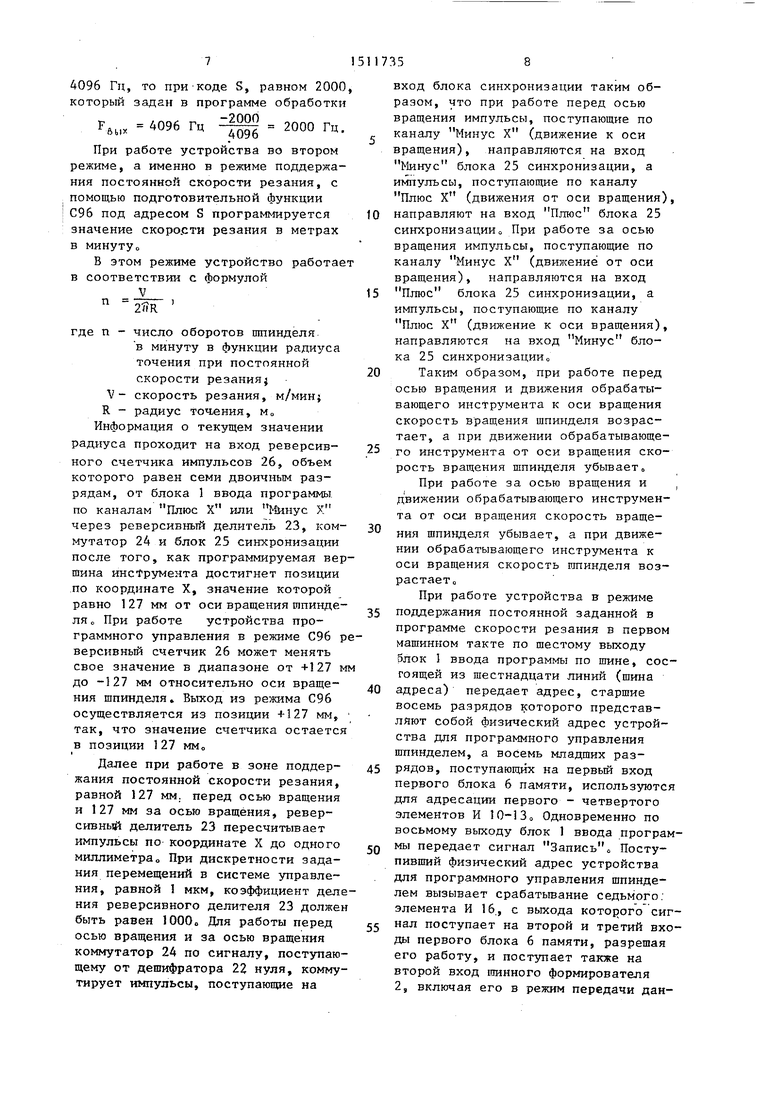
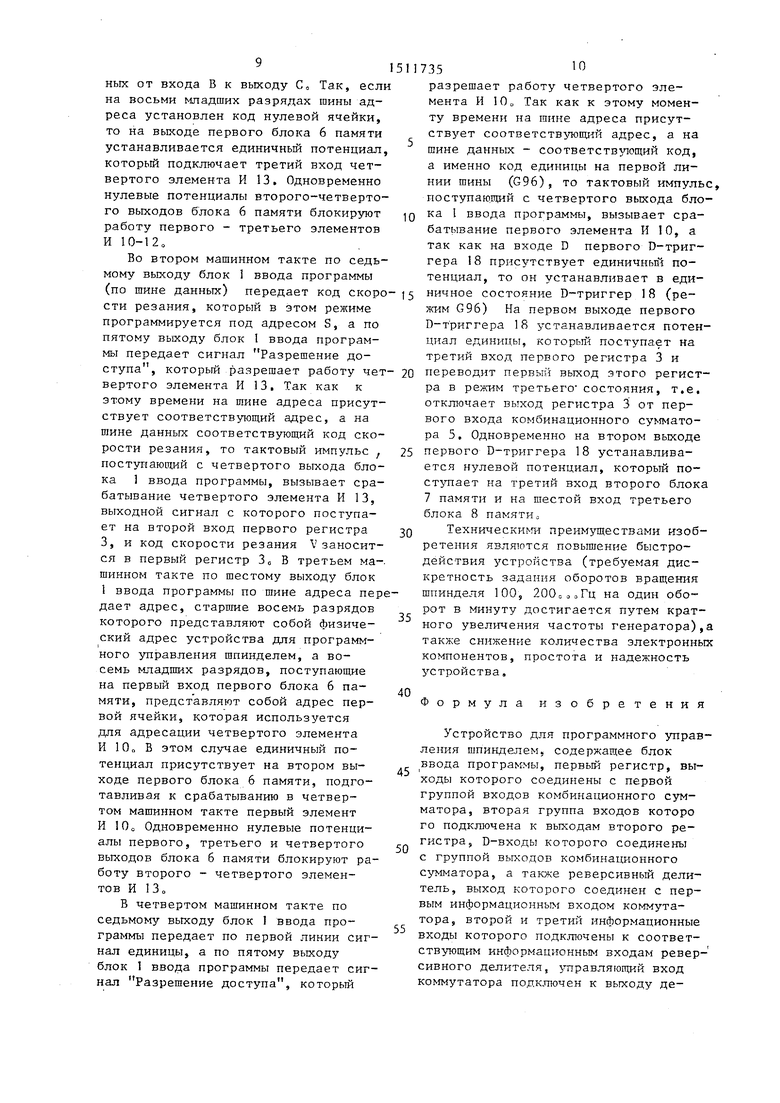
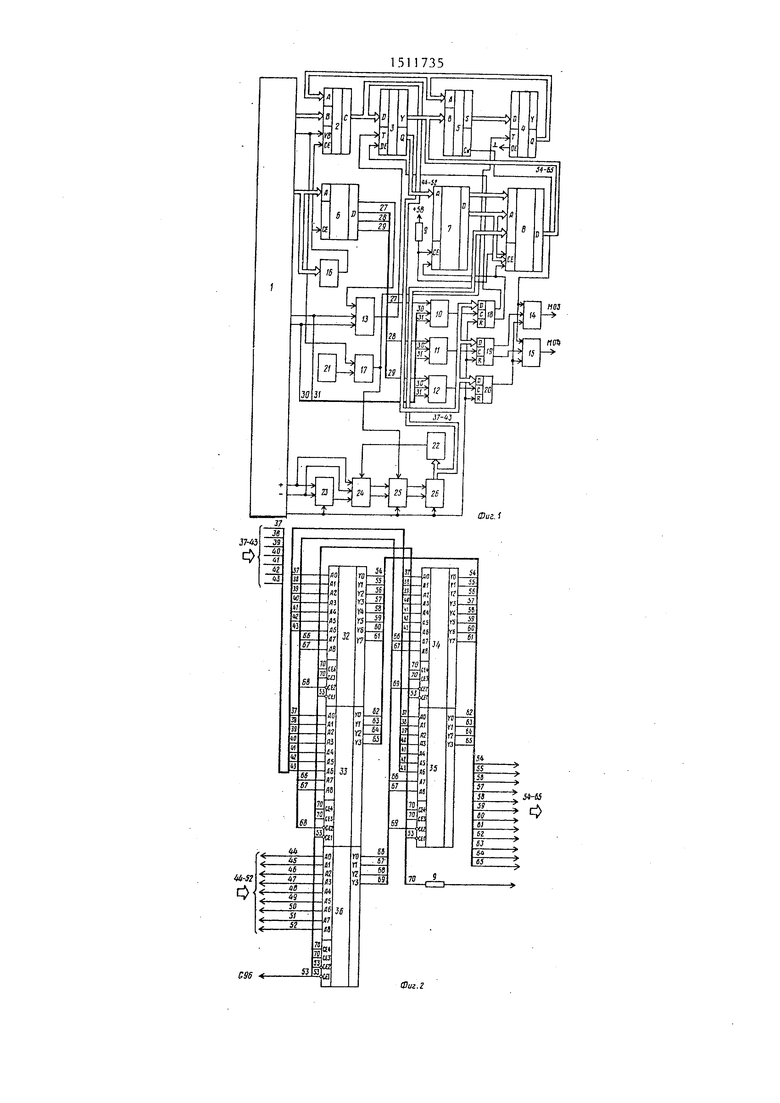
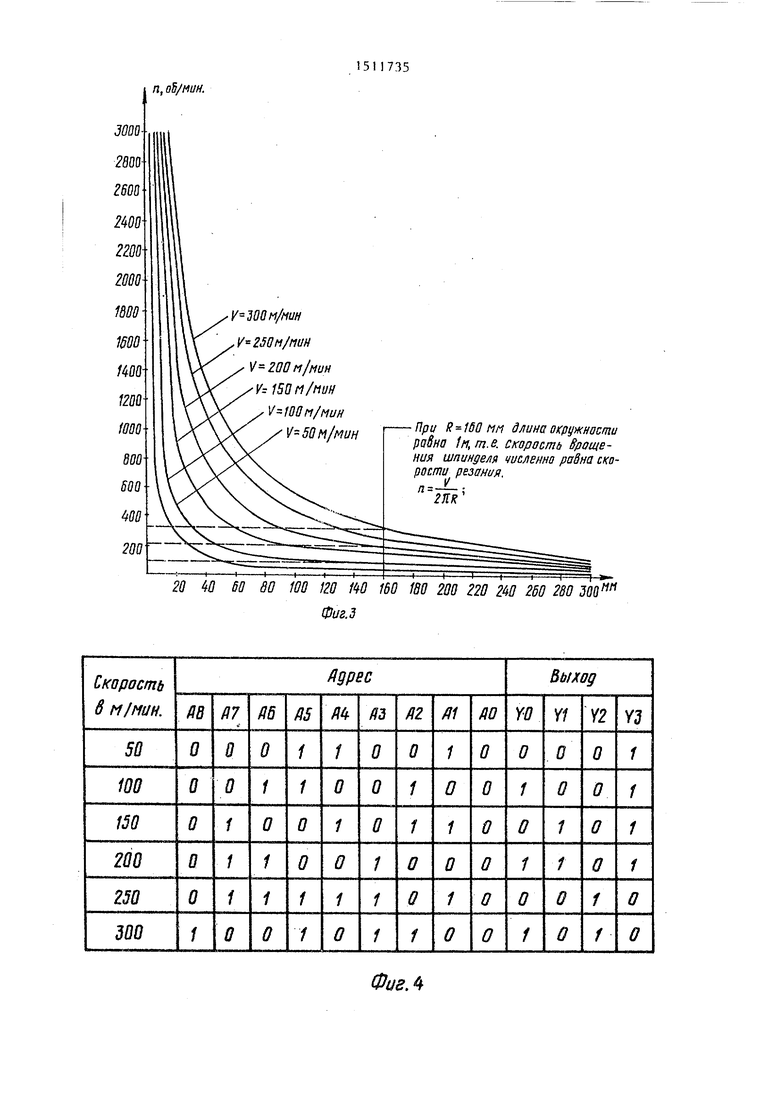
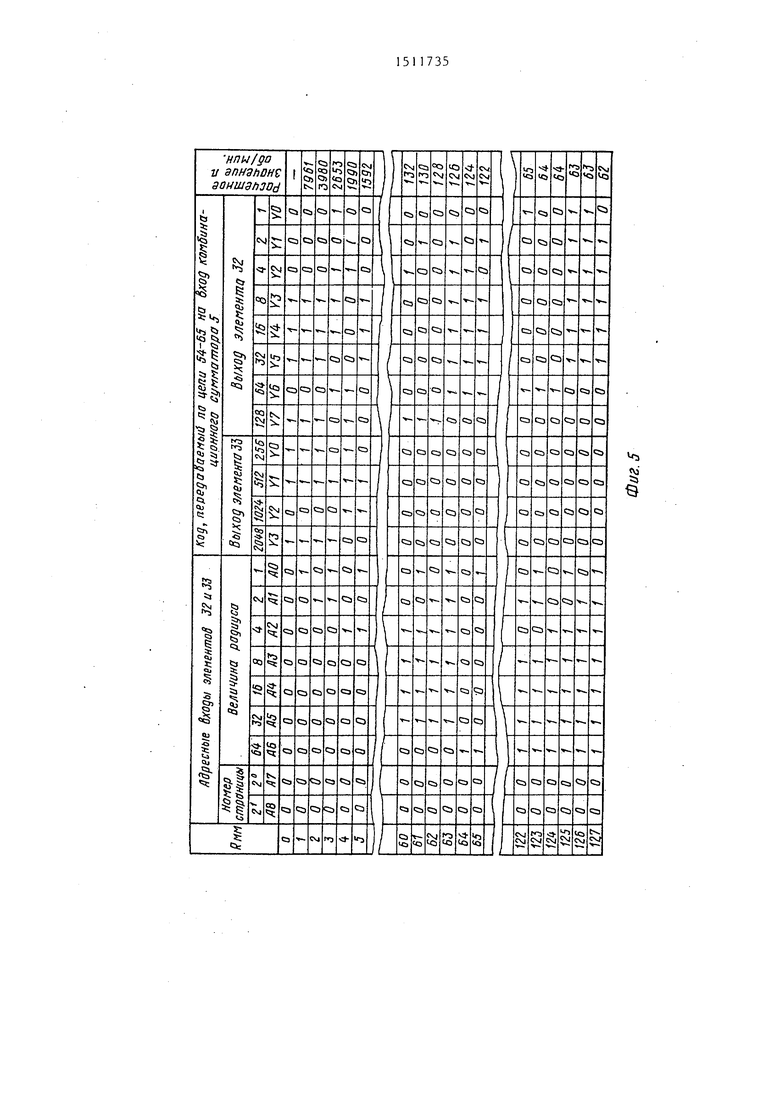
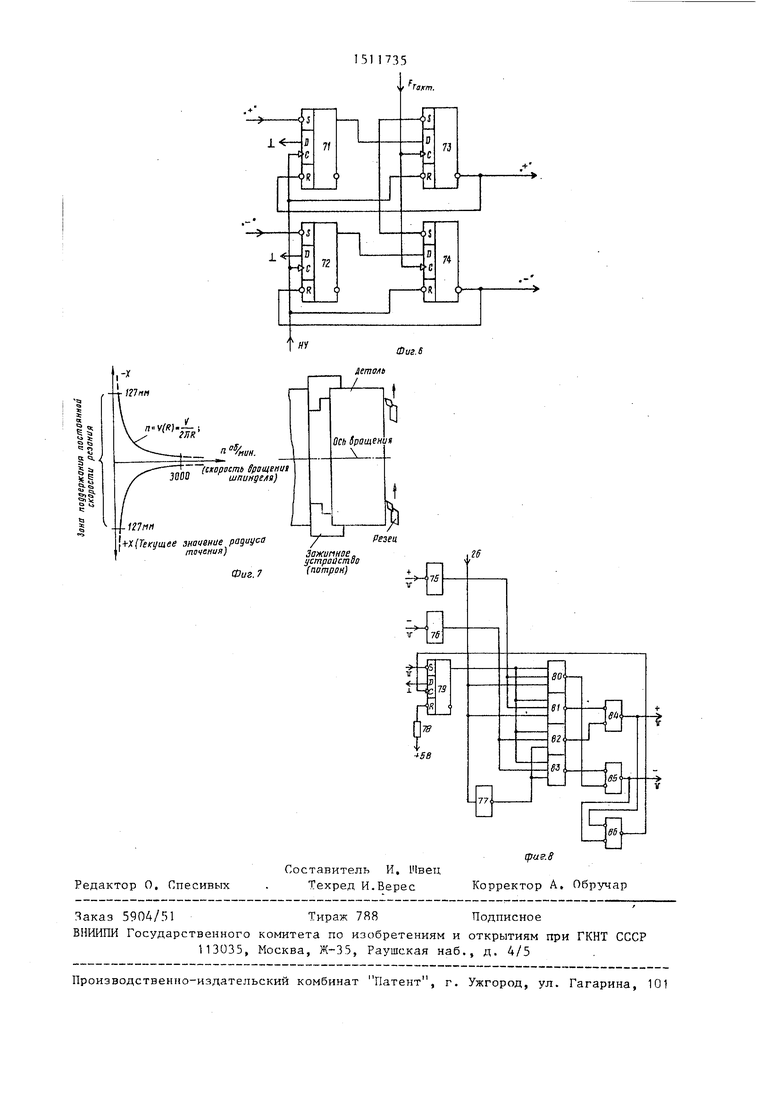
На фиг о 1 приведена блок-схема устройстваi на фиг. 2 - схема блока 7(8) памяти на фиг. 3 - график функциональной зависимости скорости вращения шпинделя от радиуса точения при постоянной скорости резания } на фиго 4 - таблица зависимо сти выходного кода элемента 34 памяти от входного кода скорости резания; на фиг о 5 - таблица зависи-. мости кода на выходах элементов 32, 33 памяти от величины радиуса точ е- ния (при соответствующем расчетном значении скорости вращения шпинделя); на фиг. 6 - схема блока 25 синхронизации j на фиг. 7 - график функциональной зависимости скорости вращения шпинделя в об/мин от радиуса точения и местоположения инструмен- та (за осью враг;ения или перед осью вращения); на фиг. 8 - схема коммутатора.
Устройство (фиг.1) содержит блок 1 ввода программы, шинньп формирователь 2, первый 3 и второй 4 регистры, комбинационный сумматор 5, перСП
00 СП
вьм - третий 6-8 блоки памяти, резистор 9, с первого по восьмой элементы И 10-17, первый - третий 18-20 D-триггеры, генератор 21 импульсов дешифратор 22 нуля, реверсивный делитель 23, коммутатор 24, блок 25 синхронизации, реверсивный счетчик 26 импульсов, входы-выходы 27-31.
Блок 7(8) памяти (фиг,2) состо- ит из первого - четвертого программируемых постоянных запоминающих элементов 32-35; блок 8 памяти (фиг о 2) состоит из программируемого постоянного запоминающего элемента Збо Позициями 37-70 обозначены вхо- ды-вьгхоДы блоков памяти.
Блок 25 синхронизации (фиг.6) состоит из четырех D-триггеров 71-74: триггеры 71 и 73 - канал Плюс, триггеры 72 и 74,- канал Минус
Коммутатор 2.4 (фиго8) состоит из инверторов 75-77, резистора 78, D- триггера 79, элементов И 80-83 и элементов ИЛИ 84-86,
Устройство работает следующим образом.
При задании в программе оборотов шпинделя с помощью подготовительной функции С97 под адресом S програмлш- руется число оборотов шпинделя в минуту
В этом режиме работы на соответствующем выходе устройства в зависимости от направления вращения шпинде ля (функции МОЗ или М04) должна быть обеспечена частота, соответствующая заданным в программе оборотам шпинделя . Это является первым режимом работы устройства
При задании в программе скорости резания с помощью подготовительной функции G96 под адресом S программируется величина скорости резания в м/миНо В этом режиме часто- та на выходе устройства, а следовательно, и обороты шпинделя должны изменяться по гиперболической зави- симос 2 и (сМофиГоЗ) Это является втрым режимом работы устройства,,
Рассмотрим работу устройства в первом режиме По сигналу Начальный установ, поступающему от блока ввода программы, первый - третий D- триггеры 18-20 устанавливаются в нулевое состояние, при этом на единичном выходе первого D-триггёра 18 устанавливается нулевой потенциал, который обеспечивает включение первого регистра 3 .в режим вывода информации на выходы Y, на нулевом выходе первого D-триггера 18 устанавливается потенциал единицы, который обеспечивает третье состояние на выходах второго и третьего блоков 7,8 памяти, т„е. отключение, третьего блока 8 памяти от шины, состоящей из двенадцати линий 54-65,На единичном выходе второго П-триггера 19 устанавливается нулевой потенциал, который блокирует работу пятого элемента И I4j на нулевом выходе второго D-триггера 19 устанавливается потенциал единицы, который разрешает работу шестого элемента И 15о На единичном выходе третьего D-триггера 20 устанавливается нулевой потенциал, которьй блокирует работу пятого и шестого элементов И 14, 15, Кроме того, по начальному установу в исходное состояние устанавливаются реверсивный делитель 23, блок 25 синхронизации, реверсивный счетчик 26 импульсов Блок 1 ввода программы далее работает в соответствии с мащин- ными тактами системы управления, которые вырабатываются при обращении к устройству для программного управления шпинделем в процессе работы
В первом машинном такте по шестому выходу блок 1 ввода программы по шине адреса, .состоящей из шестнадцати линий, передает адрес, старшие восемь разрядов которого представляют, собой физический адрес устройства для программного управления шпинделем, а восемь младших разрядов, поступающих на первый вход первого блока 6 памяти, используются для адресации пер- во.го - четвертого- элементов И 13 Одновременного по восьмому выходу блок 1 ввода программы передает сигнал Запись.
Поступивший физический адрес устройства для программного управления шпинделем вызьшает срабатывание седьмого элемента И 16, выход которого поступает на второй вход первого блока 6 памяти, разрешая его работу, и поступает также на второй вход шинного формирователя 2, включая его в режим передачи данных от входа В к выходу Со Так, если на восьми младших разрядах шины адреса установлен код нулевой ячейки, то на выходе первого блока 6 памяти устанавливается единичный потенциал, который подклю5
чает третий вход четвертого элемент И 13. Одновременно нулевые потенциал первого - третьего выходов блока 6 памяти блокируют работу первого - третьего 10-12 элементов И
Во втором машинном такте по седьмому выходу блок 1 ввода программы по шине данных, состоящей из двенадцати линий, передает код скорости вр щения шпинделя, а по пятому выходу блок 1 ввода программы передает сигнал Разрешение доступа, который разрешает работу четвертого элемента И 13„ Так как к этому моменту времени на шине адреса присутствует соответствующий адрес, а на шине данных - соответствуюшлй код скорости вращения шпинделя, то тактовый импульс, поступающий с четвертого вы- хода блока 1 ввода программы, вызывает срабатывание четвертого элемента И 13, выходной сигнал с которого поступает на второй вход первого регистра 3, и код скорости вращения шпинделя заносится в первый регистр
В третьем машинном такте по пятом выходу блок 1 ввода программы по шине адреса, состоящей из шестнадцати линий, передает адрес, старшие во- семь разрядов которого представляют собой физический адрес устройства для программного управления шпиЗДе- лем, а восемь младших разрядов, поступающие на первый вход первого блока 6 памяти, представляют собой адрес первой ячейки, которая используется для адресации первого элемента И 10„ В этом случае единичньй потенциал присутствует на втором вы- ходе первого блока 6 памяти, подготавливая к срабатыванию в четвертом машинном такте первый элемент И 10
Одновременно нулевые потенциалы второго - четвертого выходов блока 6 памяти блокируют работу первого- третьего элементов И 10-12о
В четвертом машинном такте по седмому выходу блок 1 ввода программы по шине, состоящей из двенадцати линий (шина данных), передает сигнал нуля или единицы в зависимости от того, требуется ли подтвердить нулевое состояние первого D-триггера 18 (режим С97) или установить его в единицу (режим С96), а по пятому выходу блок 1 ввода передает сигнал Разрешение доступа, который разрешает работу первого элемента И 10 Так как
1
д 0 5
о л
5
5
7356
к этому моменту времени на шине адреса присутствует соответствующий адрес, а на шине данных - соответствующий код, а именно код нуля, что соответствует режиму работы G97, то тактовый импульс, поступающий с четвертого выхода блока 1, вызывает срабатывание первого элемента И 10, а так как на выходе D первого D-триггера 18 присутствует нулевой потенциал, то он подтверждает нулевое состояние D-триггера 18о
Аналогичным образом, так как это производилось в третьем и четвертом машинных тактах, в пятом и шестом машинных тактах осуществляется запись направления вращения шпиццеля во второй D-триггер 19 (режим работы МОЗ или М04), в седьмом и восьмом машинном тактах осуществляется запись- состояния Пуск или Стоп шпинделя в третий D-триггер 20 (режим Стоп шпинделя MOS)
В девятом машинном такте блок 1 ввода программы по восьмому выходу передает сигнал Чтение (потенциал единицы), который разрешает работу восьмого элемента И 17, с выхода, которого частота генератора 21 импульсов- начинает поступать на второй вход второго регистра 4, который с комбинационным сумматором 5 образует параллельный накапливающий сумматор и осуществляет циклы суммирования с
Импульсы переполнения с второго выхода комбинационного сумматора 5 поступают на первые входы пятого и шестого элементов И 14, 15, а затем в зависимости от состояния второго D-триггера 19, который хранит признак направления вращения, поступают на соответствующий выход устройства: МОЗ или М04 (вращение шпинделя по часовой или против часовой стрелки)
Частота на выходе устройства в режиме С97 в зависимости от значений, программируемых под адресом в программе обработки детали, определяется по формуле F
вб1Х
S
ГЕН 2
- выходная частота тактового генератора; S - число оборотов шпинделя-, 2 - объем накапливающего сумматора, при его размере в двенадцать двоичных разрядов 2 4096о
Поэтому, если объем накапливающего сумматора равен 4096, а тактовая частота генератора 21 равна
Д096 Гц, то при-коде S, равном 2000 который задан в программе обработки
F6HX 096 Гц Щ 2000 Гц.
При работе устройства во втором режиме, а именно в режиме поддержания постоянной скорюсти резания, с помощью подготовительной функции С96 под адресом S программируется значение скоро.сти резания в метрах в минуту
В этом режиме устройство работае в соответствии с формулой
V
2М
где п - число оборотов шпинделя
в минуту в функции радиуса точения при постоянной скорости резанияJ V- скорость резания, м/мин} R - радиус точения, Мо Информация о текущем значении радиуса проходит на вход реверсивного счетчика импульсов 26, объем которого равен семи двоичным разрядам, от блока 1 ввода программы по каналам Плюс X или X. через реверсивньш делитель 23, коммутатор 24 и блок 25 синхронизации после того, как программируемая вершина инс-Грумента достигнет позиции по координате X, значение которой равно 1 27 мм от оси вращения шпинделя При работе устройства программного управления в режиме С96 рверсивный счетчик 26 может менять свое значение в диапазона от +127 м до -127 мм относительно оси вращения шпинделя. Выход из режима С96 осуществляется из позиции 4-127 мм, так, что значение счетчика остается в позиции 127 мМо
Далее при работе в зоне поддержания постоянной скорости резания, равной 127 мм. перед осью вращения и 127 мм за осью вращения, реверсивный делитель 23 пересчитывает импульсы по координате X до одного миллиметрао При дискретности задания перемещений в системе управления, равной 1 мкм, коэффициент делния реверсивного делителя 23 долже быть равен ЮООо Для работы перед осью вращения и за осью вращения коммутатор 24 по сигналу, поступающему от дешифратора 22 нуля, коммутирует импульсы, поступающие на
вход блока синхронизации таким об- раэом, что при работе перед осью вращения импульсы, поступающие по каналу Минус X (движение к оси вращения), направляются на вход Минус блока 25 синхронизации, а импульсы, поступающие по каналу Плюс X (движения от оси вращения), направляют на вход Плюс блока 23 синхронизации При работе за осью вращения импульсы, поступающие по каналу Минус X (двилсениё от оси вращения), направляются на вход Плюс блока 25 синхронизации, а импульсы, поступающие по каналу Плюс X (движение к оси вращения), направляются на вход Минус блока 25 синхронизации
Таким образом, при работе перед осью враш,ения и движения обрабатывающего инструмента к оси вращения скорость вращения шпинделя возрастает, а при движении обрабатывающе- го инструмента от оси вращения скорость вращения шпинделя убывает
При работе за осью вращения и , движении обрабатывающего инструмента от оси вращения скорость враще- ния шпинделя убывает, а при движении обрабатывающего инструмента к оси вращения скорость шпинделя возрастает „
При работе устройства в режиме поддержания постоянной заданной в программе скорости резания в первом машинном такте по шестому выходу блок I ввода программы по шине, состоящей из шестнадцати линий (шина адреса) передает адрес, старшие восемь разрядов которого представляют собой физический адрес устройства для программного управления шпинделем, а восемь младших раз- рядов, поступающих на первый вход первого блока 6 памяти, используются для адресации первого - четвертого элементов И Одновременно по восьмому выходу блок 1 ввода програм- мы передает сигнал Запись о Поступивший физический адрес устройства для программного управления шпинделем вызывает срабатьгоание седьмого: элемента И 16., с выхода которого сиг- нал поступает на второй и третий входы первого блока 6 памяти, разрешая его работу, и поступает также на второй вход шинного формирователя 2, включая его в режим передачи дан9
ных от входа В к выходу С, Так, есл на восьми младших разрядах шины адреса установлен код нулевой ячейки, то на выходе первого блока 6 памяти устанавливается единичный потенциал который подключает третий вход четвертого элемента И 13, Одновременно нулевые потенциалы второго-четверто го выходов блока 6 памяти блокируют работу первого - третьего элементов И 10-12„
Во втором машинном такте по седьмому выходу блок i ввода программы (по шине данных) передает код скор сти резания, который в этом режиме программируется под адресом S, а по пятому выходу блок 1 ввода программы передает сигнал Разрешение доступа, который разрешает работу че вертого элемента И 13, Так как к этому времени на шине адреса присутствует соответствующий адрес, а на шине данных соответствующий код скорости резания, то тактовый импульс поступающий с четвертого выхода блока ввода программы, вызывает срабатывание четвертого элемента И 13, выходной сигнал с которого поступает на второй вход первого регистра 3, и код скорости резания V заносится в первый регистр 3„ В третьем машинном такте по шестому выходу блок 1 ввода программы по шине адреса пердает адрес, старшие восемь разрядов которого представляют собой физический адрес устройства для программного управления шпинделем, а восемь младших разрядов, поступающие на первый вход первого блока 6 па- мяти, представляют собой адрес первой ячейки, которая используется для адресации четвертого элемента И Юо В этом случае единичный потенциал присутствует на втором вы- ходе первого блока 6 памяти, подготавливая к срабатыванию в четвертом машинном такте первый элемент И 10о Одновременно нулевые потенциалы первого, третьего и четвертого выходов блока б памяти блокируют работу второго - четвертого элементов И 13с,
В четвертом машинном такте по седьмоьгу выходу блок 1 ввода программы передает по первой линии сигнал единицы, а по пятому выходу блок 1 ввода программы передает сигнал Разрешение доступа, который
735
10
разрешает работу четвертого элемента И Юо Так как к этому моменту времени на шине адреса присутствует соответствуюпц-тй адрес, а на шине данных - соответствующий код, а именно код единицы на первой линии шины (G96) , то тактовый импульс поступаю.щий с четвертого выхода блока 1 ввода программы, вызывает срабатывание первого элемента И 10, а так как на входе D первого D-триг- гера 18 присутствует единичньш потенциал, то он устанавливает в единичное состояние D-триггер 18 (режим G96) На первом выходе первого D-т риггера 18 устанавливается потенциал единицы, которьш поступает на третий вход первого регистра 3 и переводит первый выход этого регистра в режим третьего состояния, т,е, отключает выход регистра 3 от первого входа комбинационного cyNJMaTO- ра 5, Одновременно на втором выходе первого D-триггера 18 устанавливается нулевой потенциал, который по- ст пает на третий вход второго блока 7 памяти и на шестой вход третьего блока 8 памяти о
Texничecки и преимуществами изобретения являются повышение быстродействия устройства (требуемая дискретность задания оборотов вращения шпинделя 100, 200 о о о Гц на один оборот в минуту достигается путем кратного увеличения частоты генератора), также снижение количества электронны компонентов, простота и надежность устройства.
Формула изобретения
Устройство для программного управления шпинделем, содержащее блок ввода программы, первый регистр, выходы которого соединены с первой группой входов комбинационного сумматора, вторая группа входов которо го подключена к выходам второго регистра, D-входы которого соединены с группой выходов комбинационного сумматора, а также реверсивньш делитель, выход которого соединен с первым информационным входом коммутатора, второй и третий информационные входы которого подключены к соответствующим информационньм входам ревер сивного делителя, управляюш гй вход коммутатора подключен к выходу дешифратора нуля, информационные входы которого подключены к разрядным выходам реверсивного счетчика импульсов, первый и второй входы которого соединены с соответствующими выходами блока синхронизации, установочный вход которого подключен к установочному входу реверсивного делителя, ревер- |сивного счетчика импульсов и уста- :новочному ВЫХОДУ блокв программы, 1о тли чающееся тем, что, с целью повышения быстродействия и упрощения устройства, в него введены шинный формирователь, первый, второй и третий блоки памяти, генератор им- пульсой, восемь элементов И, первый и третий D-триггеры, первый и второй информационные входы реверсивного делителя подключены к первому и второму информационным выходам блока ввода программы, установочный выход которого подключен к R-входам первого, второго и третьего D-тригге- ров, к С-входам которых подключены соответственно выходы первого, второго и третьего элементов И, к первым входам которых подключены третий информационньй выход блока ввода программы и первый вход четвертого элемента И, к вторым входам - четвертый информационный выход блока ввода п1)ограммы и второй.вход четвертого элемента И, первый, второй и третий выходы первого блока памяти подключены к третьим входам первого, второго и третьего элементов И соответственно, четвертый выход первого блока памяти подключен к третьему входу четвертого элемента И, выход которого соединен с тактирующим входом первого регистра, к информационному входу которого подключены через шину D-входы первого, второго и третьего D-триггеррв и выход шинного формирователя, к первому входу которого подсоединены через шину разрядные выходы второго регистра и вторая группа входов комбинационного
сумматора, выход которого подключен к первым входам пятого и шестого элементов И, втбрые входы которых под ключены соответственно к нулевому и единичному выходам второго D- триггера, нулевой выход первого D- триггера подключен к установочному входу первого регистра, а нулевой
выход третьего D-триггера подключен к третьим входам пятого и шестого элементов И, пятый выход блока ввода программы подсоединен к первому входу первого блока памяти и к перво5 му входу седьмого элемента И, выход которого подключен к установочным входам первого блока памяти и шинного формирователя, к третьему входу шинного формирователя подключен0 шестой выход блока ввода программы, а к четвертому входу - седьмой выход блока ввода программы и первый-вход восьмого элемента И, к второму входу которого подключен выход генератора
5 импульсов, а выход восьмого элемента И соединен с входом второго регистра и с третьим входом блока синхронизации, выход первого регистра соединен с первым входом второго
0 блока памяти, первая группа выходов которого подключена к первым адрес- HbBsi входам третьего блока памяти, вторая группа выходов - к второму и третьему адресным входам третьего бло ка памяти, к четвертому адресному входу которого подключен выход реверсивного счетчика импульсов, к первому управляющему входу третьего блока памяти и к первому управляюQ щему входу второго блока памяти подключен через резиртор положительный потенциал, а к второму управляющему входу третьего блока памяти подключены единичный выход первого D-тригс гера и второй управляющий вход второго блока памяти, а выход третьего блока памяти подключен посредством монтажного ИЛИ к второй группе входов комбинационного сумматора.
нт
Фиг.
п, oS/MUH.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1981 |
|
SU976428A1 |
| Система числового программного управления с постоянной скоростью резания для токарно-винторезных станков | 1981 |
|
SU978102A1 |
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
| Устройство для программного управления позиционного типа | 1983 |
|
SU1158976A1 |
| Мажоритарное декодирующее устройство | 1986 |
|
SU1372627A1 |
| Многокоординатный цифровой интерполятор | 1984 |
|
SU1200246A1 |
| Устройство для проверки выполнения последовательности команд микропроцессора | 1984 |
|
SU1247874A1 |
| Контурная система программного управления | 1989 |
|
SU1681298A1 |
| Устройство для адаптивного программного управления металлорежущими станками | 1980 |
|
SU964581A1 |
| Устройство автоматизированной подготовки программ для станков с ЧПУ | 1986 |
|
SU1354160A1 |
Изобретение относится к автоматике и вычислительной технике и может найти применение в системах ЧПУ станками, в которых требуется управлять скоростью вращения шпинделя, а также поддерживать заданную в программе скорость резания при переменном радиусе обработки. Цель изобретения - повышение быстродействия и упрощения устройства. Устройство для программного управления шпинделем содержит блок ввода программы, регистры, комбинационный сумматор, три блока памяти, три D-триггера, элементы И, реверсивный счетчик импульсов, генератор импульсов, блок синхронизации, дешифратор нуля, реверсивный делитель. Данное устройство имеет повышенное быстродействие при простоте и надежности схемы. 8 ил.
V -ZSQM/nuH
V ZaOti/tiuH V l50f1/nuH V lOOn/MUH V 5QM/MUH
2Q 0 SO 80 ЮО т по т Ш ж 220 ж 260 280 308
Фиг.З
При мм djiuHa окружности раднй in, т.е. скорость Вращения шпинделя численно раВнй скорости резания.
Ш
Фиг Л
i
,-х
глк
/г
пин.
,„пг, (сюраапб Уращеми ЗиВишпинделя)
п1Текащее значение радиуса точения)
Фиг. 7
Леталб
Резец
| Устройство для программного управления | 1981 |
|
SU960736A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
