11
00
со
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ИНСТРУМЕНТА В КООРДИНАТНОЙ СИСТЕМЕ ОТСЧЕТА СТАНКА АВТОМАТИЗИРОВАННОГО ГРАВИРОВАЛЬНОГО КОМПЛЕКСА | 2005 |
|
RU2279964C1 |
| ИСПОЛНИТЕЛЬНАЯ СИСТЕМА ПРОГРАММНО-АППАРАТНОГО КОМПЛЕКСА ДЛЯ ФОРМИРОВАНИЯ РЕЗАНИЕМ ДИСКРЕТНЫХ ПРОФИЛЬНЫХ СТРУКТУР РИСУНКА ГРАВЮРЫ В ФУНКЦИОНАЛЬНОМ СЛОЕ ПЕЧАТНОЙ ФОРМЫ | 2007 |
|
RU2360771C2 |
| СПОСОБ ФОРМИРОВАНИЯ ДИСКРЕТНЫХ ПРОФИЛЬНЫХ СТРУКТУР РИСУНКА ГРАВЮРЫ В ФУНКЦИОНАЛЬНОМ СЛОЕ ПЕЧАТНОЙ ФОРМЫ НА МЕТАЛЛОРЕЖУЩЕМ СТАНКЕ | 2007 |
|
RU2356704C2 |
| ФРЕЗЕРНЫЙ СТАНОК С ЧПУ | 2013 |
|
RU2572111C2 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ДЕТАЛЕЙ НА ФРЕЗЕРНОМ СТАНКЕ С ЧПУ | 2013 |
|
RU2571553C2 |
| СПОСОБ ОБРАБОТКИ ИЗДЕЛИЯ С ПОВЕРХНОСТЬЮ СЛОЖНОГО ПРОФИЛЯ РЕЗАНИЕМ ПОСРЕДСТВОМ МНОГОФУНКЦИОНАЛЬНОГО ПРОГРАММНО-АППАРАТНОГО АГРЕГАТА | 2010 |
|
RU2446034C1 |
| Металлорежущий станок с ЧПУ | 1979 |
|
SU967007A2 |
| Вертикальный шлифовальный станок с числовым программным управлением | 1975 |
|
SU656813A1 |
| СПОСОБ КОМПЕНСАЦИИ ТЕПЛОВЫХ ДЕФОРМАЦИЙ МЕТАЛЛОРЕЖУЩИХ СТАНКОВ С ЧПУ | 2014 |
|
RU2573854C1 |
| Устройство для определения геометрических погрешностей траектории движения стола фрезерных станков с ЧПУ | 2016 |
|
RU2641939C2 |
Изобретение относится к контрольно-измерительной технике. Целью изобретения является повьшение точности за счет учета погрешностей во всем рабочем пространстве станка. Устройство содержит источник I, устанавливаемый непосредственно в шпинделе 2 станка, и платформу 5 с группой фотоприемников 6, устанавливаемую на столе 7 станка. Устройство позволяет перед обработкой отследить отклонения в перемещении подвижных частей станка во всем рабочем пространстве и ввести поправки дпя компен- .сации погрешностей при обработке деталей на станке. 2 ил.;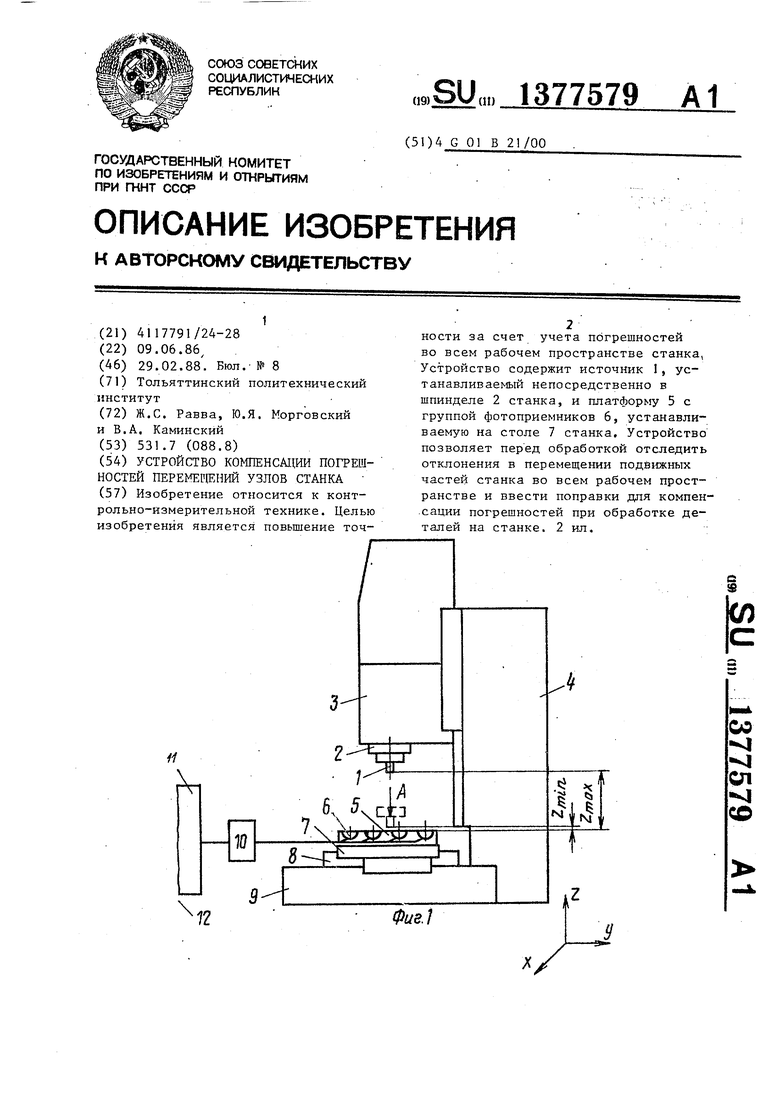
Изобретение относится к контрольно-измерительной технике и может быть использовано в машиностроении, преимущественно в стан состроении, на станках с числовым программным управлением (ЧПУ).
Целью изобретения является повышение точности за счет учета погрешностей во всем рабочем пространстве станка.
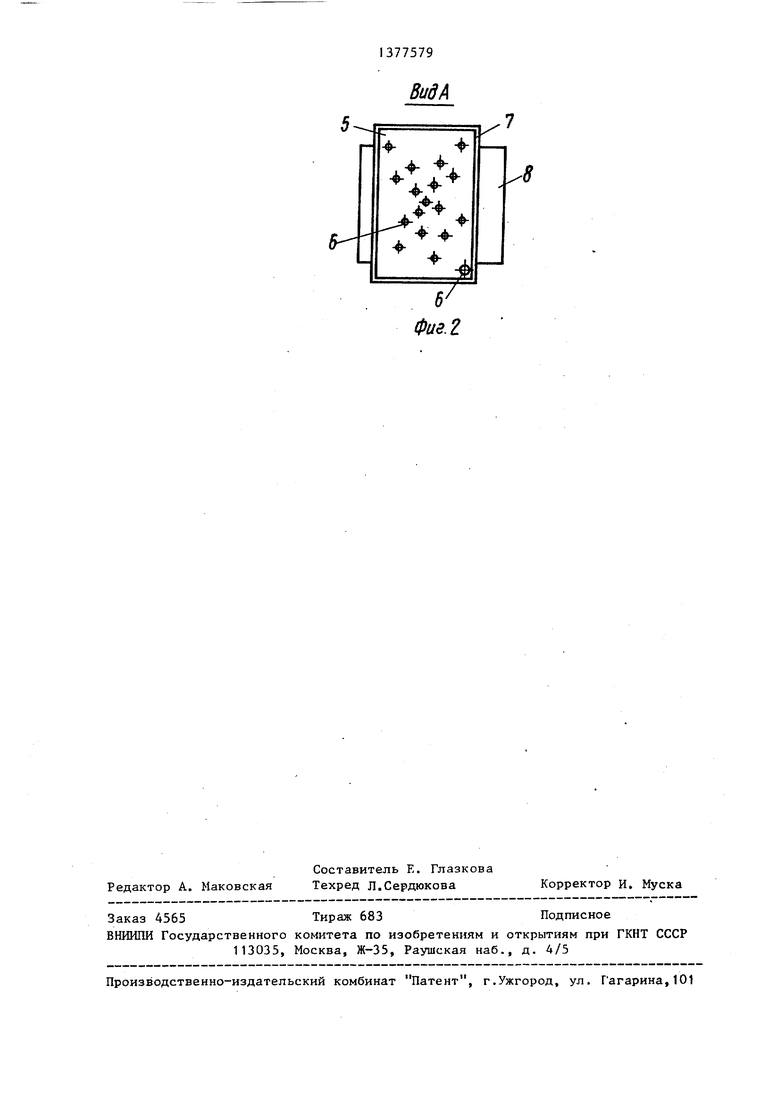
На фиг.1 показано устройство компенсации погрешностей перемещений узлов станка; на фиг.2 - вид А на фиг. 1 .
Устройство состоит из источника 1 когерентного света, устанавливаемого в шпинделе 2 станка соосно ему с возможностью перемещения вместе со шпиндельной бабкой 3 по стойке 4; платформы 5 с двухкоординатными позиционными фотоприемниками 6, устанавливаемой на верхнем столе 7.станка с возможностью перемещения по двум координатам вместе с верхним 7 и нижним 8 столами по станине 9, блока 10 обработки информации, системы числового программного управления (ЧПУ) 11 с блоком 12 хранения и вывода поправок координат. Один из двухкоординатных позиционных фотоприемников 6 является базовым, а координаты всех остальных двухкоординатных позиционных фотоприемников 6 предварительно измерены относительно базового 6 с высокой точностью.
Устройство работает следующим образом.
Шпиндель 2 с источником 1 когерентного света устанавливается в крайнее нижнее положение по вертикальной оси Z. На верхний слой 7 устанавливается платформа 5 с двухкоординатными позиционными фотоприемни- ками 6. Перемещением верхнего 7 и нижнего 8 столов платформа 5 с двухкоординатными позиционными фотоприемниками 6 перемещается до совмещения луча источника 1 когерентного света с перекрестием базового двухкоординатного позиционного фотоприемника 6 . В этом положении устанавливается плавающий нуль системы П ЧПУ.
Шпинделю 2 (шпиндельной бабке 3) системой ЧПУ 1 1 задается перемещение по оси Z. Через определенные интервалы перемещения шпинделя 2 по оси Z отклонения луча источника 1 когерентного света от перекрестия базового двухкоординатного позиционного фотоприемника б измеряются, преобразуются в циф5эовую форму отклонений координат X и Y в блоке 10 обработки информации и заносятся в блок 12 хранения и вывода поправок координат. Таким образом формируются поправки
координат до перемещения в верхнее крайнее положение шпинделя 2.
Затем шпиндель 2 с источником 1 когерентного света устанавливается в крайнее нижнее положение по оси Z,
и луч источника 1 когерентного света совмещается- с перекрестием каждого следующего из двухкоординатных фотоприемников 6. При движении по оси Z производится запись отклонений координат так же, как и для базового двухкоординатного позиционного фотоприемника 6.
Таким образом снимаются отклонения координат при движении по оси Z
для сетки координат X и Y, определяемой расположением фотоприемников 6. Вычисленные поправки используются затем при обработке детали.
Формула изобретения
0
0
Устройство компенсации погрешностей перемещений узлов станка, содержащее блок обработки информации, систему числового программного управления и оптический блок измерения перемещений, устанавливаемый на станке, ,о т л и ч. а ю щ е е с я тем, что, с целью повышения точности , оптический блок выполнен съемным и содержит источник когерентного света, закрепляемый соосно шпинделю станка, и платформу с двухкоординатными позиционными фотоприемниками, устанавливаемую на столе станка, а двухкоординатные позиционные фотоприемники подключены к блокам хранения и вывода поправок координат системы числового программного управления.
