О
6-i
(Л
со
00
со со
со
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для отделения листовых заготовок от стопы | 1980 |
|
SU978987A1 |
| Штамповочный комплекс | 1981 |
|
SU1015991A1 |
| Устройство для отделения плоской заготовки от стопы | 1986 |
|
SU1324727A1 |
| Устройство для отделения листовой заготовки от стопы и подачи ее в зону захвата | 1988 |
|
SU1680417A1 |
| Устройство для поштучного отделения верхнего листа от стопы | 1986 |
|
SU1382548A1 |
| Устройство для ориентации, базирования и подачи листовой заготовки в рабочую зону пресса | 1991 |
|
SU1784376A1 |
| Устройство для подачи полосового материала в рабочую зону пресса и удаления обработанного материала | 1983 |
|
SU1143499A2 |
| Комплекс для штамповки деталей из полосового и ленточного материала | 1983 |
|
SU1199379A1 |
| Устройство для отделения листовой заготовки от стопы и подачи ее в зону обработки | 1989 |
|
SU1763073A1 |
| Устройство для отделения верхнего листа от стопы и подачи его в зону обработки | 1981 |
|
SU1015992A1 |
Изобретение относится к средствам механизации и автоматизации листовой штамповки и может быть использовано для подачи листового материала в рабочую зону пресса или другого технологического оборудования для обработки листовых заготовок. Пелью изобретения является рас лирение технологических возможностей за счет обеспечения подъема полосового материала различной длины. После захвата полосы захватные ор- гапы поднимаются вверх. Срабатывает пор- 1пень 18, который поворачивает рычаги 20 и 21. Рычаги сближают губки 23. Губки 23 зажимают верхнюю полосу за торцы, так как губки выполнены со скосом под углом а, , 1 листы в стопе не бывают уложены ровно. Ilpn сближении губок 23 происходит захват иерхией полосы и отделение нижней. 8 ил.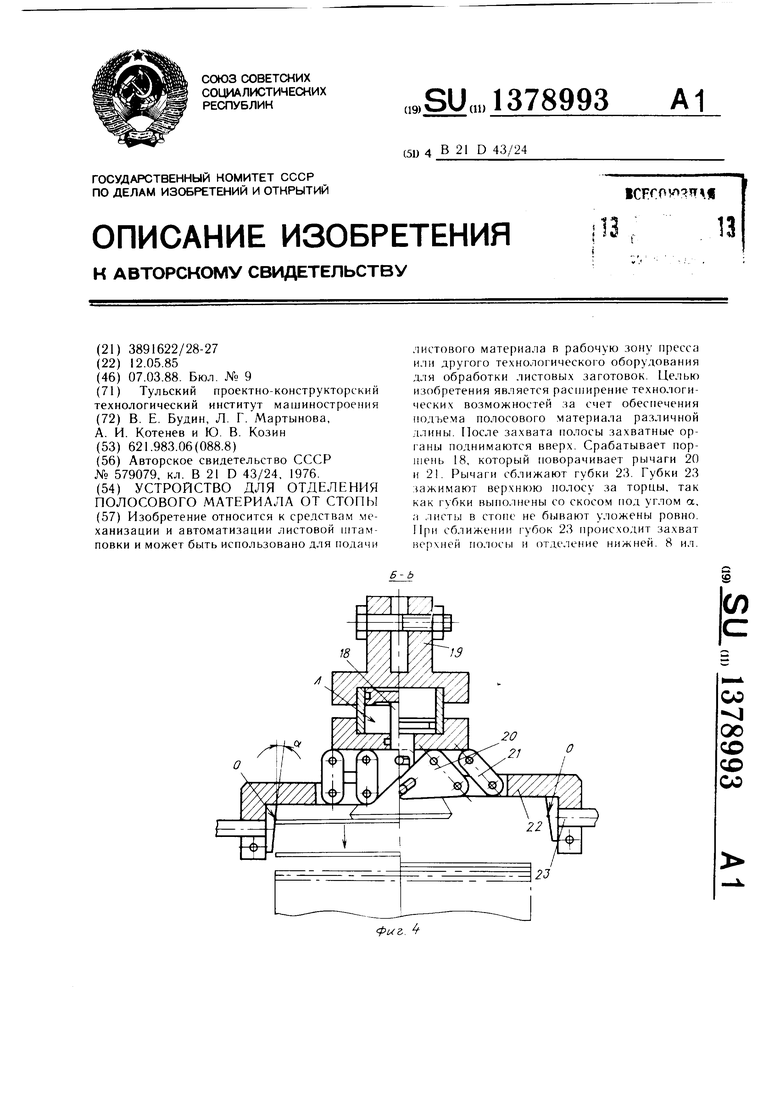
puz.
Изобретение относится к средствам механизации и автоматизации листовой штамповки и может быть использовано для подачи полосового материала в рабочую зону пресса или другого технологического обо- рудования.
Цель изобретения -г pacцJИpeниe технологических возможностей за счет обеспечения подъема полосового материала разной длины.
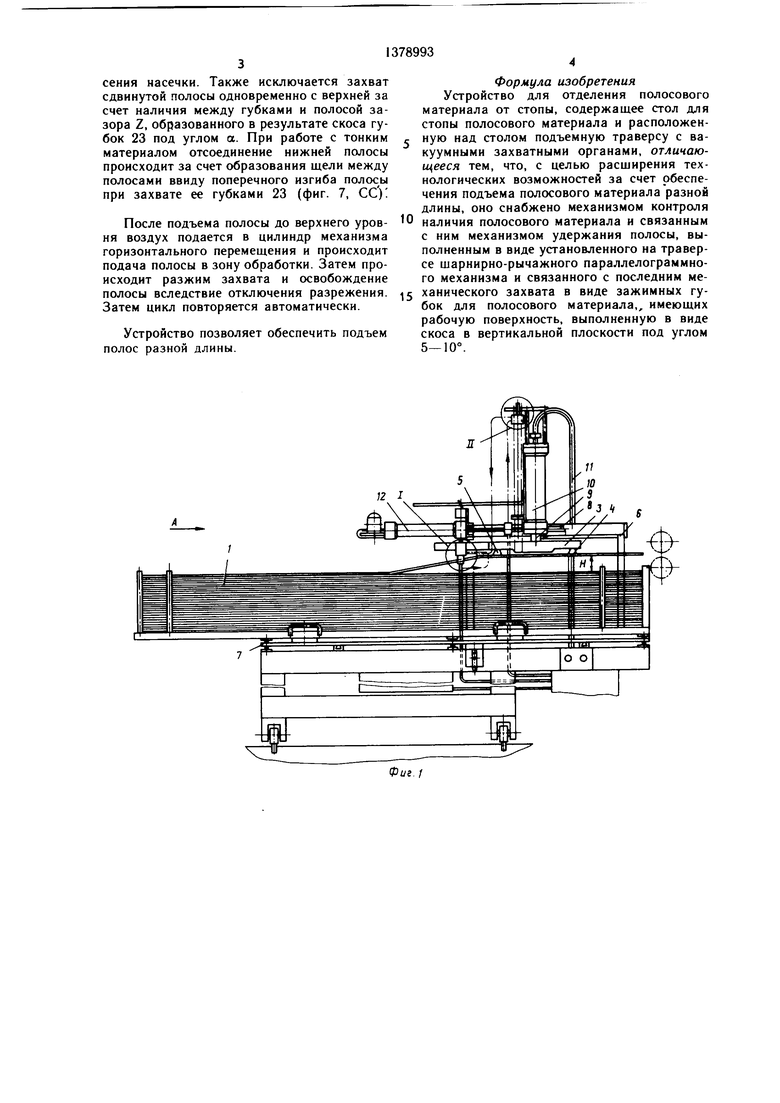
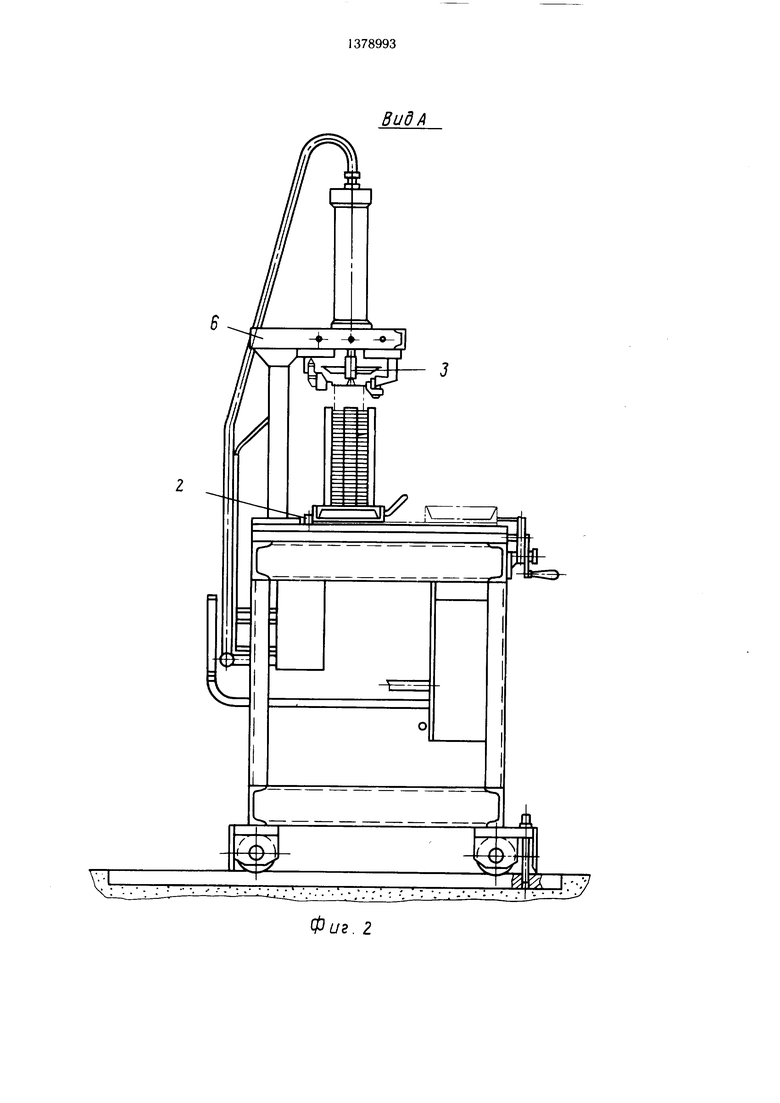
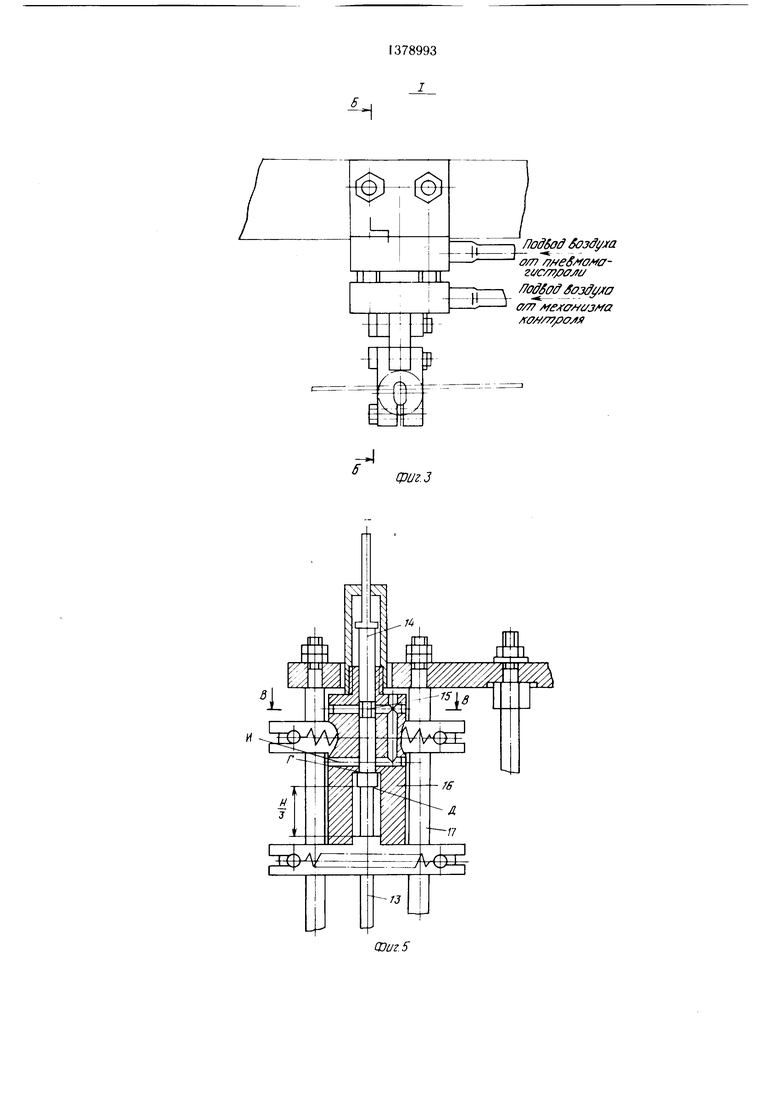
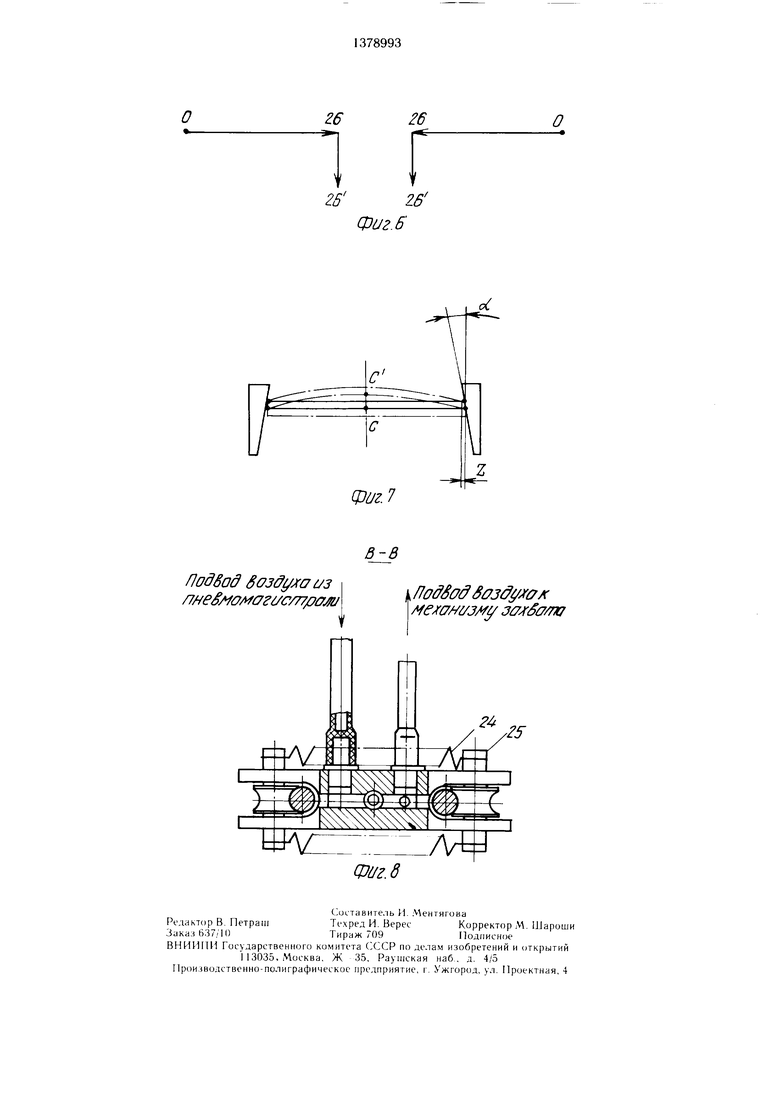
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - вид А на фиг. I; на фиг. 3 - узел I на фиг. 1; на фиг. 4 - разрез Б-Б на фиг. 3; на фиг. 5 - узел II на фиг. 2; на фиг. 6 - траектория движения точек О на фиг. 4; на фиг. 7 - схема образования про- гиба и отсоединения прилипшей полосы; на фиг. 8 - разрез В-В на фиг. 5.
Устройство для отделения полосового .материала от стопы и подачи его в зону обработки имеет стопу полос 1, упор 2, траверсу 3 с вакуумными захватными органами 4 и 5. Траверса 3 установлена на кронштейне 6, смонтированном на столе 7. На кронштейне 6 установлены направляюшие механизма 8 горизонтального перемещения, UJTOK 9 цилиндра 10 механизма вертикального перемещения траверсы, шланг I 1 подвода воздуха и цилиндр 12 механизма горизонтального перемещения.
На верхней крышке цилиндра 10 закреплен механизм контроля наличия полосы, который имеет толкатель 13, шток 14 с проточ- кой 15, верхняя часть которого служит для визуального контроля работы .механизма, каретку 16, перемещающуюся по направляющим 17, закрепленным на крышке цилиндра. Полость И в каретке 16 служит д.чя сброса воздуха из рабочей полости пневмоцилиндра в атмосферу.
На траверсе установлен механизм удержания и разделения слипшихся полос, который имеет поршень 18, основание 19, рычаги 20 и 21, державки 22, в которых закреплены зажимные губки 23, регулируемые под различную ширину полос. На каретке 16 установлены пружины 24 с роликами 25.
Устройство работает следующим образом.
Стопа полос 1 загружается в кассету, устанавливается на стол 7 в зоне загрузки, перемещается вручную в рабочую зону до упора 2 под подъемную траверсу.
В исходном положении траверса 3 находится на кронштейне 6 в верхнем положении справа у валков обрабатывающего уст- ройства. При запуске устройства траверса 3 посредством цилиндра 12 горизонтального перемещения перемещается в левое положение и под действием поршня 9 цилиндра 10 опускается на стопу полос 1 в правой ее части.
При движении механизма вакуумного захвата вниз толкатель 13 перемещает каретку 16, при этом щток 14 с проточкой 15 находится в нижнем положении (плос5
с
r
0
,,
0
кость Д находится в контакте с корпусом каретки), каналы подвода воздуха к механизму захвата полосы 1 перекрыты и механизм удержания находится в разжатом положении. От свободного падения каретки 16 вниз ее предохраняют тормозные пружины 24, которые прижимают ролики 25 к направляющим 17.
В момент касания вакуумными захватными органами 4 и 5 полосы срабатывает датчик (не показан), который дает команду на включение разрежения и на обратный ход штока 9 цилиндра 10 механизма вертикальных перемещений.
При подъеме полосы на величину, боль- иую Н, может произойти отрыв полосы от вакуумных захватных органов 4 и 5 вследствие ограниченной грузоподъемности (случай захвата двух слипшихся полос), а также ввиду образования прогиба длинной полосы, при этом датчик (не показан) подает команду механизму вакуумного захвата вернуться за полосой.
Таким образом высота Н - это расстояние от места захвата полосы захватными органами 4 и 5 до места отрыва ее от захватных органов, т. е. высота гарантированного подъема полосы.
После захвата полосы вакуумными захватными органами 4 и 5 траверса, двигаясь вверх, перемещает толкатель 13, который, нажимая на щток 14, перемещает его вверх на величину Н/3 до контакта плоскости Г с корпусом каретки. При этом проточка 15 совмещается с каналом подвода воздуха к механическому захвату. Воздух попадает в полость Л и поднимает порщень 18 в верхнее положение до упора в основание 19, при этом шток поворачивает рычаги 20 и 21, которые стягивают державки 22 вместе с губками 23. Происходит зажим полосы за торцы. Зажим осуществляется только верхней полосы, так как в губках захвата выполнены скосы под углом а, а листы в стопе никогда не бывают уложены абсолютно ровно и в любой паре смежных листов кромки одного из них выступают за кромки другого. При сближении губок 23 происходит сдвиг нижней полосы в какую-либо сторону, в то время как верхняя остается неподвижной за счет удержания ее вакуумными захватными органами 4 и 5.
Отсоединение нижней полосы происходит также за счет наличия вертикальной составляющей (фиг. 6, точки 26 и 26) во встречном движении губок 23, благодаря этому к моменту сдвига нижней полосы происходит ее перемещение вниз, в результате чего между верхней полосой и нижней образуется щель, которая нарушает вакуум между полосами, являющийся основным из факторов слипания полос, проскальзывание по плоскости губок исключается за счет нанесения насечки. Также исключается захват сдвинутой полосы одновременно с верхней за счет наличия между губками и полосой зазора Z, образованного в результате скоса губок 23 под углом а. При работе с тонким материалом отсоединение нижней полосы происходит за счет образования щели между полосами ввиду поперечного изгиба полосы при захвате ее губками 23 (фиг. 7, СС )
длины, оно снабжено механизмом контроля После подъема полосы до верхнего уров- 0 наличия полосового материала и связанным ня воздух подается в цилиндр механизма с ним механизмом удержания полосы, вы- горизонтального перемещения и происходит полненным в виде установленного на травер- подача полосы в зону обработки. Затем про- се шарнирно-рычажного параллелограммно- исходит разжим захвата и освобождение го механизма и связанного с последним ме- полосы вследствие отключеиия разрежения. 5 ханического захвата в виде зажимных гу- Затем цикл повторяется автоматически.бок для полосового материала,, имеющих
рабочую поверхность, выполненную в виде
Устройство позволяет обеспечить подъем скоса в вертикальной плоскости под углом полос разной длины.510°.
Формула изобретения Устройство для отделения полосового материала от стопы, содержащее стол для стопы полосового материала и расположен- ную над столом подъемную траверсу с вакуумными захватными органами, отличающееся тем, что, с целью расширения технологических возможностей за счет обеспечения подъема полосового материала разной
длины, оно снабжено механизмом контроля наличия полосового материала и связанным с ним механизмом удержания полосы, вы- полненным в виде установленного на травер- се шарнирно-рычажного параллелограммно- го механизма и связанного с последним ме- ханического захвата в виде зажимных гу- бок для полосового материала,, имеющих
Ч-
:
Фиг. 2
В ид А
mLJ
I
Лодбод о/л /7/v ff/w/wZi/C/7 /Off t/
(7/77 /Wxfi7/y J/%7 /((7Л /77/ О Л
r
фиг.З
гб
26 26
Фиг. 6
Подвод So3ffi/ f7L/3
(7 i/C/77/}CfJKJ
Со1. тавитель И. Ментягова
Ч лактор В. ПетрашТехред И. ВересКорректор Л. 1Лароши
Зака;) 637/10Тираж 709Подписное
ВНИИГ1И Государственного комитета ( по делам изобретений и открытий
I 13035, Москва, Ж 35, Рау1пская наб,, д. 4/5 Производствопно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
26
О
(Риг. 7
If, ( JC Sff/Tv
Фиг. 5
| Устройство для отделения листовой заготовки от стопы | 1976 |
|
SU579079A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
