7Й
18
ш
ел
S
00
со
J7
фиг1
Изобретение относится к машиностроению, а именно к манипуляторам для подачи деталей и материалов в зону обработки или сборки.
Цель изобретения - расширение зоны обслуживания за счет уменыиения мертвой зоны пантографа.
На фиг. 1 изображен .манипулятор, общий вил; на фиг. 2 - разрез А-А на фиг. 1.
Устройство состоит из установленного на основании I корпуса 2, двигателя 3, присоединенного к корпусу 2 шарниром 4 входного звена 5 пантографного ме.ханизма. В состав пантографа вместе со звеном 5 в.ходят рычаги 6 и 7 и выходное звено 8. Рычаги 6 и 7 соединены шарниро.м 9, на оси которого установлен ролик 10, разме- ценный в фасонном пазу 11 корпуса 2. На рычаг 7 установлено ведо.мое зубчатое колесо 12 соосно п арниру 9 и прикреплено к рычагу 7 крепежными элементами 13. В зацепление с колесом 12 входит ведусцее колесо 14, приводимое посредством редуктора 15 двигателем 3, корпус которого жестко закреплен на рычаге 6. На конце звена 8 пантографа в шарнире 16 установлен схват 17. Поступательное перемещение c.xBdTy 17 обеспечивает система параллело- граммных механизмов 18. Оси шарниров 4, 9 и К) расположены на одной прямой. Паз 11 в начале и конце имеет два вертикаль- iibix участка для обеспечения подъема и опускания детали. Но паз 11 может иметь и другую конфигурацию в зависи.мости oi требуемой траектории с.хвата 17.
Мапину.чятор работает следующим образом.
В исходном положении (фиг. ) схват 17 сдЕ)кнуг к корпусу 2, а ро.1ик 10 смешен
в нижнюю часть левого вертикального участка фигурного паза 11. При включении двигатель 3 через редуктор 15 вра- шает против часовой стрелки ведущее зуб- чатое колесо 14, которое в свою очередь обкатываясь по колесу 12, вращает его по часовой стрелке. В результате рычаг б вра- шается против часовой стрелки, ролик 10 скользит по пазу 11, а схват 17 удаляется от корпуса 2. При этом шарнир 16 схвата 17 в увеличенном масштабе копирует траекторию перемещения шарнира 9, так как оси шарниров (рабочие точки) 4, 9 и 16 расположены на одной прямой, а одна из рабочих точек пантографа - ось шарнира 4 - остановлена. Таким образом, ролик 10, а следовательно, и шарнир 9 вначале перемешаются вертикально вверх, потом по тереходному участку паза 11 и затем опускаются вертикально вниз до упора в край паза. В обратном перемещении аналогичная картина.
Формула изобретения
Манипулятор, содержащий корпус с кри- волинейным пазом, руку в виде пантографа и двух рычагов, соединенных шар- нирно одними концами с соответствующими звеньями пантографа, а другими концами - между собой и с роликом, расположенным в криволинейном пазу, двигатель, отли- чающийся тем, что, с целью расширения зоны обслуживания за счет уменьшения мертвой зоны пантографа, он снабжен зубчатой передачей, одно из зубчатых колес которой кинематически связано с двигателем и расположено на первом рычаге, а другое зубчатое колесо жестко установлено на втором рычаге соосно ролику.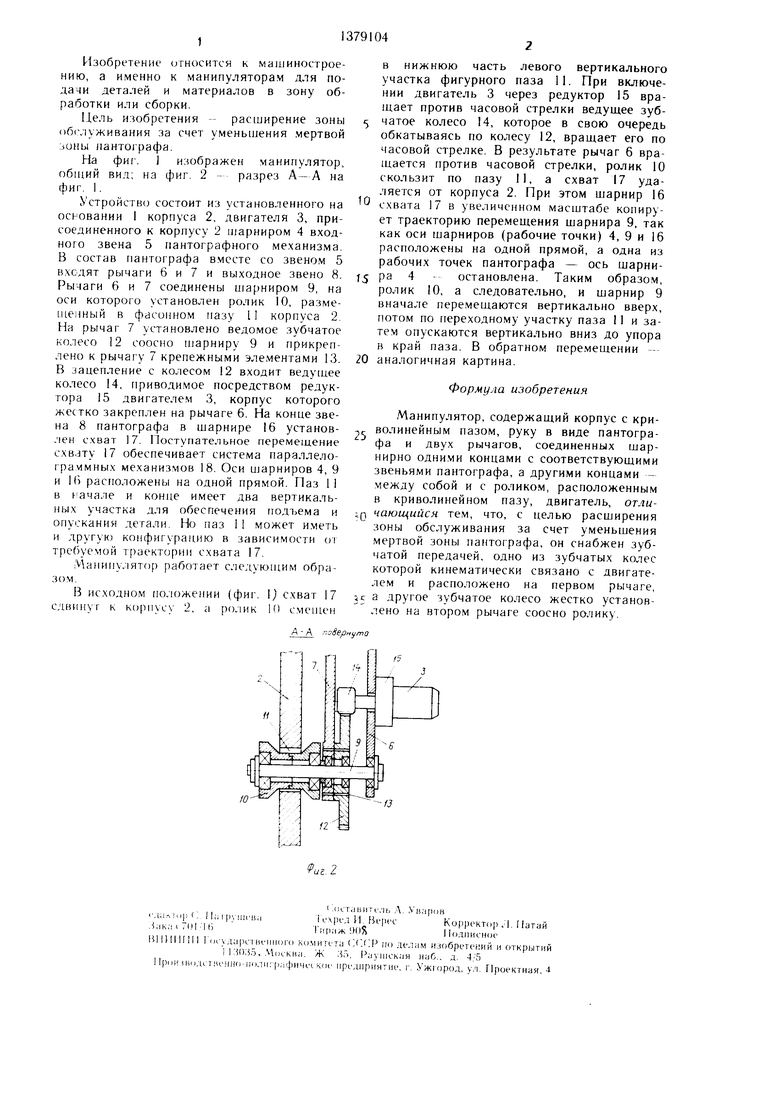
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1364467A1 |
| Стержневой манипулятор | 1989 |
|
SU1641605A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Манипулятор для замены погружного стакана на слябовой машине непрерывного литья заготовок | 2016 |
|
RU2639089C2 |
| Манипулятор | 1984 |
|
SU1194673A1 |
| Манипулятор | 1978 |
|
SU685614A1 |
| Манипулятор | 1988 |
|
SU1636204A1 |
| Рука манипулятора | 1983 |
|
SU1117204A1 |
| Манипулятор к прессу | 1986 |
|
SU1346321A1 |
| Схват манипулятора | 1983 |
|
SU1087327A1 |
Изобретение относится к области машиностроения, а именно к манипуляторам для подачи деталей и материалов в зону обработки или сборки. Целью изобретения является расширение зоны обслуживания за счет уменьшения мертвой зоны пантографа. При включении двигателя 3 через редуктор 15 начинает враш,аться против часовой стрелки ведуш.ее зубчатое колесо 14, которое, в свою очередь обкатываясь по ведомому зубчатому колесу 12, жестко связанному с рычагом 7, приводит во вращение против часовой стрелки рычаг 6 и по часовой стрелке рычаг 7. При этом ролик 10 катится по фасонному пазу 11 корпуса 2, а схват 17 удаляется от корпуса 2. Шарнир 16 схвата 17 в увеличенном масп1та- бе копирует траекторию перемещения шарнира 9. 2 ил.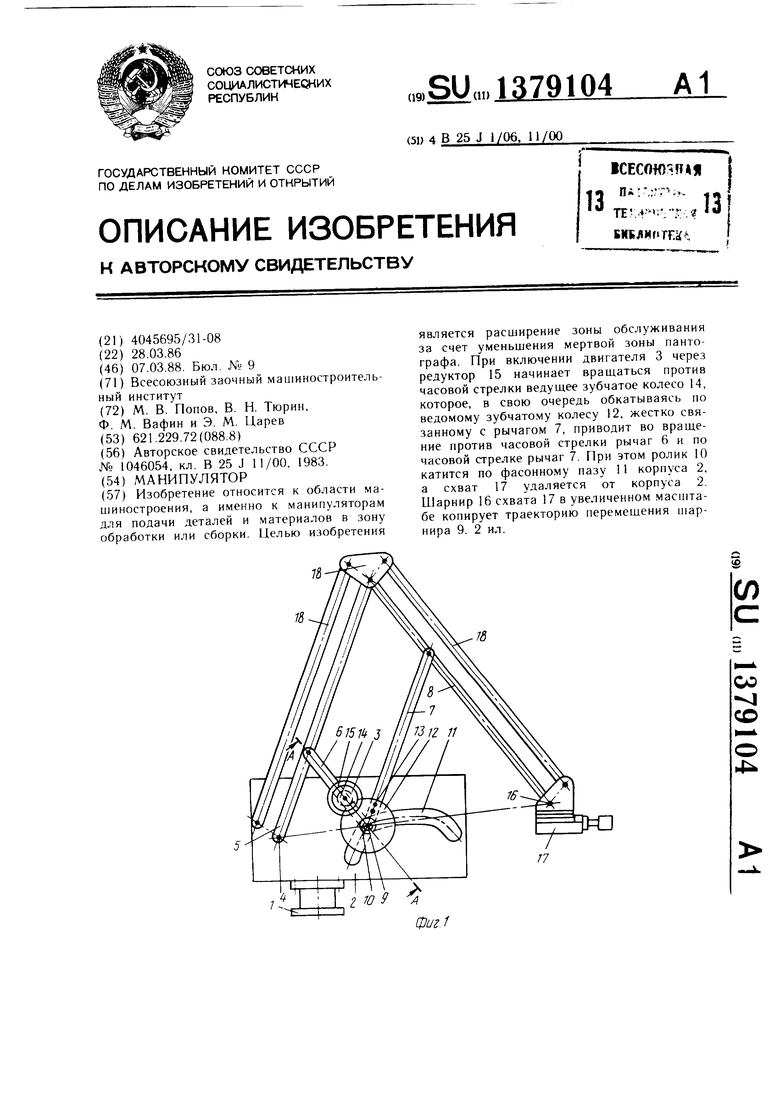
А А noSepntjmo
| Устройство для автоматической сварки угловых замкнутых швов | 1982 |
|
SU1046054A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
