со
ел
Изобретение относится к дорожно-строи- тельным машинам поточного действия и может быть использовано для автоматического управления заданным курсом движения двухгусеничной дорожной машины с рабочим органом, расположенным перед базой машины.
Цель изобретения - повышение надежности.
На чертеже представлена гидравлическая схема системы управления.
Система управления состоит из задат- чика - тросового копира 1, датчика 2 курса, блока 3 управления, гидрораспределителя 4 управления поворотом машины, соединенного гидролиниями с источником питания и сливом, а также с управляюшими полостями гидроцилиндров 5 и 6 одностороннего действия управления регулятора.ми подачи насосов 7 и 8 пере.менной производительности. Штоки гидроцилиндров 5 и 6 шарнирно соединены с регуляторами подачи насосов 7 и 8, а также между собой с помошью поперечной тяги 9, опирающейся на стойку 10. Гидроцилиндры 5 и 6 и стойка 10 закреплены ц арнирно на подвижной поперечной балке 11, связанной с рычагом 12 управления с помошью тяги 13. Стойка 10 имеет регулировочное устройство 14, благодаря которому может изменять скою длину. Напорные и сливные магистрали левого и правого гидромотора привода хода соединены гидролиниями через трехпози- ционный гидрораспределитель 15 с электроуправлением. Гидромоторы 16 и 17 соединены через бортовые редукторы с гусеничными движителями 18 и 19 машины 20.
Система управления работает следуюши.м образом.
Поступательная скорость машины 20 задается перемещением тяги 13, соединенной с ручкой 12 управления в кабине оператора. При движении по прямой золотники гидрораспределителей 4 и 15 находятся в нейтральных позициях. При этом давление рабочей жидкости в управляющих полостях гидроцилиндров 5 и 6 отсутстует и напорные и сливные магистрали левого 17 и правого 16 гидромоторов соответстенно соединены .между собой, тем самым .между гидромоторами осуществляется гидравлическая связь, а два гидронасоса соединены параллельно.
При отклонении машины от курса, заданного тросовым копиром 1 (как при изменении направления самого тросовою копира), датчик 2 курса формирует сигнал отклонения и передает его на блок 3 управления, откуда поступает сигнал управления одновременно на управляющие электромагниты гидрораспределителя 4 управления поворотом MaujHHbi и гидрораспределителя 15. При этом золотник гидрораспределите;1я 15 перекрывает гидролинии, соединяющие напорные и сливные магистрали гидромоторов 16 и 17 привода хода, а золотник гидрораспределителя 4 занимает одну из рабочих позиций, открывая доступ рабочей
жидкости в полость управления гидроцилиндра 5 или 6. Рабочая жидкость, поступая в управляющую полость, перемешает Fiopnienb и связанный с ним шток, тем самым изменяет положение регуляторов насосов 7 и 8 переменной производительности. При этом усилие, возникающее на штоке одного гидроцилиндра (например, 5), передается через поперечную тягу на шток другого гидроцилиндра (например, 6), вызывая его противоположное перемещение.
Таким образом, увеличение подачи одного
гидронасоса вызывает уменьц ение подачи другог о гидронасоса, в результате чего гусеничные движители врашаются с различными скоростями, что вызывает поворот машины в сторону уменьшения курсовой ошибки.
Как только сигнал курсовой ошибки с датчика 2 исчезает, исчезает и управляющий сигнал на электромагнитах управления гид- рораспределителя.ми 4 и 15, при этом их
золотники снова занимают нейтральное положение. Пружины в полостях гидроцилиндров 5 и 6 возвращают поршни в исходное положение, подачи идронасосов 7 и 8 выравниваются и машина движется прямо. Установка нулевого положения регуляторов подачи насосов 7 и 8 пере.менной производительности осуществляется путем изменения длины опорной стойки 10 с помошью регу.чировочног о устройства 14.
35
Формула изобретения
(Система управ, 1ения движением по курс двум усеничпой машины, содержащая задат- чик курсагросовь1Й копир, шуповыИ
датчик курса, трехпозиционный гидрорасQ нределител(, управления поворотом мап1ины с управляющими электромагнитами, гидроцилиндры, соединенные с тягами управления регуляторами подачи насосов, насосы переменной производительности, сообщенные с левым и правым гидромоторами привода
5 ;ола и связанные с последними левый и правый гусеничные движители, отличающаяся гем, что, с целью повышения надежности, она снабжена блоко.м управления, трехпозиционным четырехлинейным гидро- распределите;1ем с э. 1ектромагнитным управ0 лением, причем б. юк управления входом подключен к датчику курса, а двумя выходами соответственно к электромагнитам упомянутых гидрораспределителей, причем напорные и сливные магистрали левого и правого г идромоторов привода хода соединены
- соответственно между собой посредством трехпозиционного г идрораспределителя с электром агн итным упра вление.м.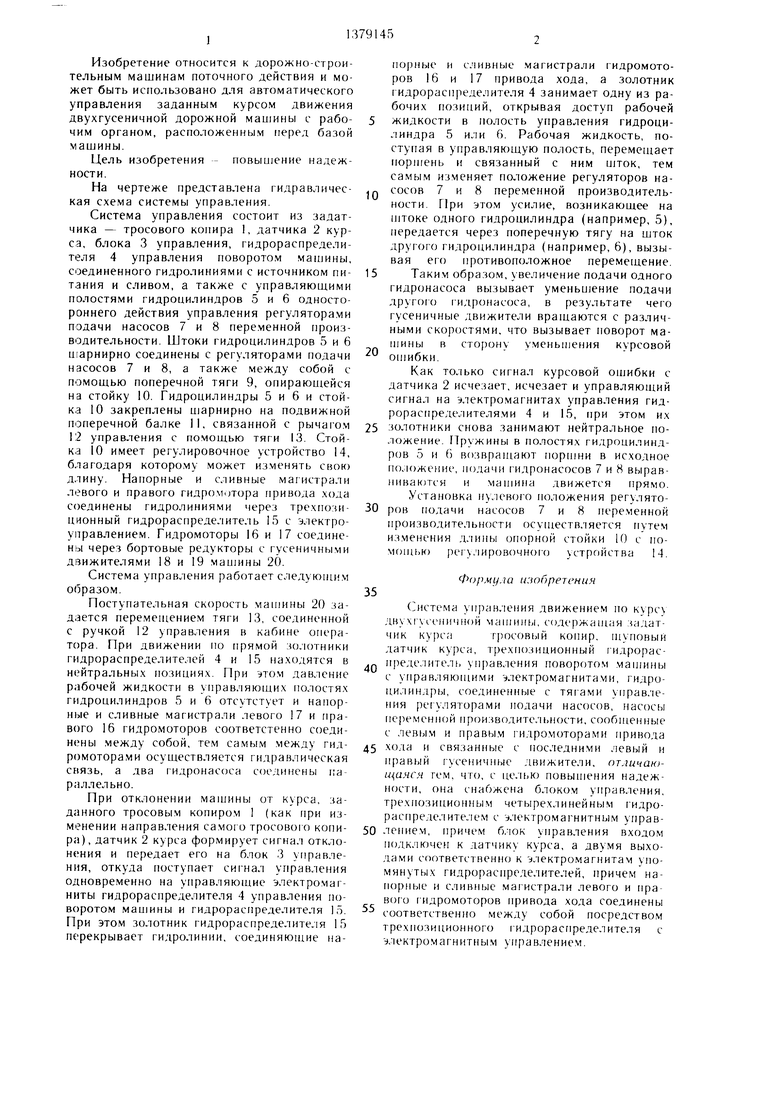
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления рабочим органом в горизонтальной плоскости двухгусеничной землеройной машины | 1985 |
|
SU1265266A1 |
| Система поворота шарнирно сочлененных гусеничных тракторов | 1987 |
|
SU1495191A1 |
| Гидропривод грузовой лебедки | 1985 |
|
SU1268507A1 |
| Гусеничная машина | 1985 |
|
SU1306796A1 |
| Гидравлическая система управления поворотом гусеничной машины | 1983 |
|
SU1134455A1 |
| Система автоматической подачи кабеля в рабочий орган самоходного кабелеукладчика | 1988 |
|
SU1717743A1 |
| Гусеничная машина | 1987 |
|
SU1437293A2 |
| ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1990 |
|
RU2013275C1 |
| Гидростатический привод прицепа | 1986 |
|
SU1395530A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНО-ПУСКОВЫМ КОНТЕЙНЕРОМ МИННОГО ЗАГРАДИТЕЛЯ | 2010 |
|
RU2442944C1 |
Изобретение относится к дорожностроительным ман1инам поточного действия и может исно. 1ь:ювано для автг)матичес- ког() управления :)аданным курсом движения дву.хгусеничной дорожной машины с рабочим органом, расположенным перед базой машины. Целью изобретения является повышение надежности. Система управления содержит ладатчик курса -- тросовый копир 1, шуповый датчик 2 курса, гидрораспределитель 4 управления поворотом машины с управляющими электромагнитами, гидроцн- линдры 5 и 6 и тяги 9 управления регуляторами подачи насосов, насосы 7 и 8 переменной производительности, левый 17 и правый 16 гидромоторы привода .хода н связанные с ними левый 19 и правый 18 гусеничный двигатели. Напорные и сливные магистрали левого и правого гидромоторов привода .хода соединены соответственно между собой посредством тре.хпозиционного гидрораспределителя 15 с электроуправлением, управляющие электромагниты которого включены парал,1ельно в электрические цепи электромагнитов гидрораспределителя 4 управления поворотом машины. 1 ил. (Л
| Патент США ЛУ 3454121, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
