Изобретение относится к механизации 11огруэочно-разгрузоч}11.гх работ, а именно к устройствам для 1акопле- иия изделий в стопу.
Цель изобретения - упрощение KOfi- струкции.
На фиг. 1 изображено устройстпо для накопления изделий в стопу, вид cCoicy; на фш-. 2 - шщ А на Лиг. i; на фиг. 3 -- расчетная схема де)ствия сил.
Устройство для накопления изделий в стопу состоит из со CToi iKoA 1 , н KOTOjioii установлена ось 2 с блоками 3 и 1, Площадка 5 гибким тяговым 6 связана с блоком 4. Усилие, создаваемое весом стопы из- ; ел111, установленных на площадке 5 передается герез ось 2 и блок 4 на гибкуп тяговый орган 7. Тяговыг орган 7 и тяговый орган 8 противовеса 9 имеют общую точку 10 крепления.Орган 8 креп ггся также к крайней верк- Hei i точке вертикаль Юй профилированной направляющей 11, которая установлена на стойке 1, Стопа изделий помещается в накопитель 12. Стойка 1 закреплена на несушем кронштейне 13.
Гибкие тягов 11е органы 6 и 7 гзы- полняют функцию органа, связыва1оо1его площадку 5 с противовесом 9.
YcTpoiicTBO работает следую1чим образом.
В исходном положении плогиадка 5 полностью разгружена, а противовес 9 находится в своем крайнем нижнем по- ложе)нп1-. Ря О вес уравновешен натяже- Hiiei-i органа В, которое воснр Н{имает направляющая 11.
При ггоступлен1Н изделий в накопитель 12 их сила веса посредством гшо- 1Чадки 5 через орган 6 вызывает поворот оси 2 с блоками 3 и 4. При повороте блока 4 орган 7, наматы1 аясь на fie го, приводит в движение орган 8 с противовесом 9, поскольку днамет- ры блоков равны, то уменьшение длины орг ана 7 рапно смещению площадки 5. Во время движения органа 8 она огибает направляющую 11 и сходит с нее по касательной. Угол схода органа 8 однозначно определяет величину и на- пт)авла1 11е равнодействующей F веса груза 0 и натяжения его тяги R. При определенной велич}Н1е смещения площадки 5 равнодействующая этих сил уравновешивает вес стопы изделий и
п)иводит данную cHCTeNry в состояние устойчивого равновесия.
Для того, чтобы при смещепии площадки 5 уровень стопы изделий поддерживался постоянным, профиль направляющих рассчитан так, чтобы величина равнодействующей была пропор- пиональна изменению длины органов Q 6 и 7, а ее направление противоположно длины органа 7, через которую передается вес стопы изделий Р, т.е.
,- F -су,
5 где с - козффициент жесткости;
у - величина смещения площадки. Если из точки захода органа 7 на блок 4 провести вертикальную по- лярнуто ось, расстояние от точки за0 хода до точки 10 крепления по направлению органа 7 обозначить /3 , а угол между ней и полярной осью 9, то условие равновесия системы под действием веса стопы изделий Р и
5 равнодействурзщей Т имеет следующий вид:
+Я--,
т п (.
где Р j nZ проекции соответству- дюи1их сил на касательную к траектории перемещения точки 10 крепления органов 7 и b под действием веса стопы изделий. Уравнение равновесия можно переписать следующим образом:
г- COS (ci-flj-Oj/coso.
5
40
Преобразуя разность углов, получаем
P(cosoicos9+sirWsin9)G cose/, 0 P(cosS+tg ;- sin9).
N
В прямоугольных координатах с центром в точке захода органа 8
dx dy
где X - горизонтальная координата 0 точки;
у - вертикальная координата.
В полярных координатах, когда x-DsinQ, y |3cos9
tF esii; t 22
dy rtcopd-p,ir.9
где Р - первая производная Р ( 0) по 0 .
Подставляя значения тангенса исходное уравнение, получаем
1-,/ л. (isinQ+pcosQ . ,,
G..P(cos0+ r-S-- -3 Sinfl),
pcos9-nsin9
откуда
. (L
l- d-cffe P(l-p); .„ dcos9 I Q Gn(-p- ) P
Обозначив , преобразуем лученное уравнение к виду
(-)
Р
Р
или
t+P(p)(P)
Известно, что при сматывании кривой с эволюты ее незакрепленный конец описывает траекторию эвольвенты, При этом эволюта есть геометрическое место радиусов кривизны, который равен
R(pUp)/(),
где Р - вторая производная р(6) по 6
Подставляя в уравнениер 2l(1- -COS0), получаем
R 1 1-л|2(1-со89) .
Угол CJ между радиусом-вектором точки и касательной к ней Г можно определить по формуле
20 , откуда (l-cos9)/ /21 I ,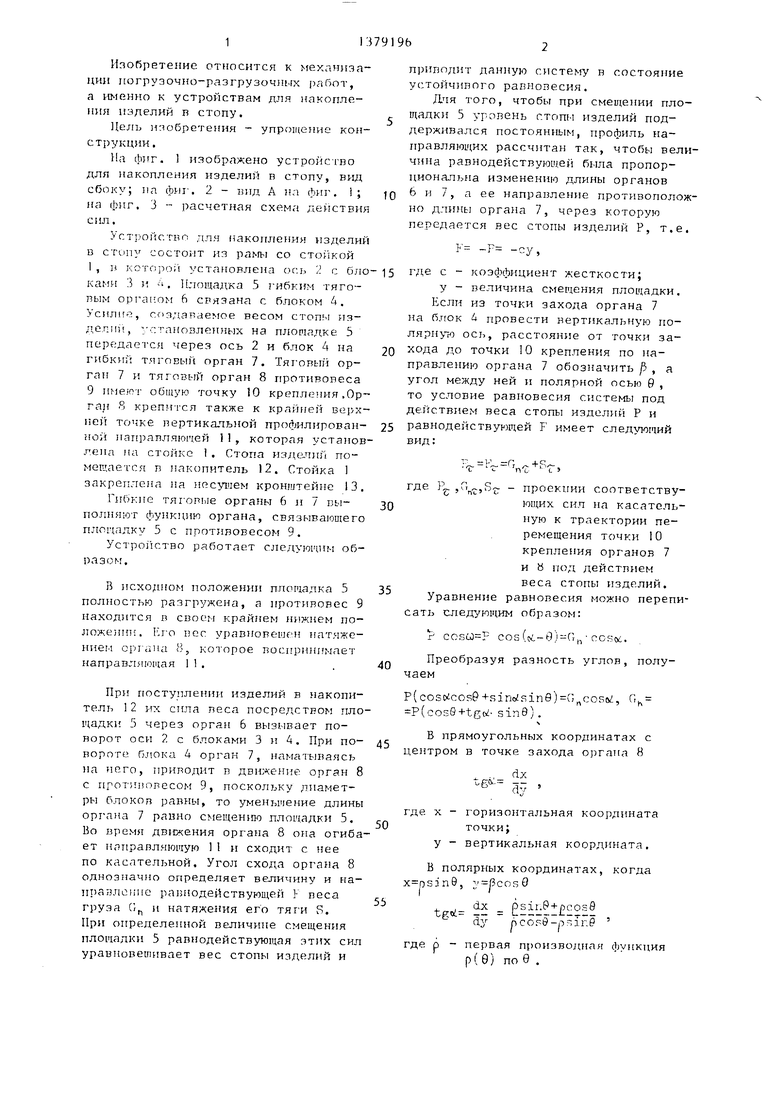


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для укладки изделий в стопу в накопителе | 1986 |
|
SU1348275A1 |
| Устройство для поштучной выдачи длинномерных цилиндрических изделий | 1983 |
|
SU1247335A1 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 2012 |
|
RU2513887C1 |
| Устройство для торможения цилиндрических изделий на наклонных направляющих | 1987 |
|
SU1527102A1 |
| Фокусирующий коллектор солнечной энергии | 1990 |
|
SU1793170A1 |
| Устройство для подбора стеблей сельскохозяйственных культур | 1985 |
|
SU1301340A1 |
| Подъемный механизм | 1989 |
|
SU1684217A1 |
| Кантователь | 1985 |
|
SU1335519A1 |
| УСТРОЙСТВО ДЛЯ КАНТОВАНИЯ ИЗДЕЛИЙ | 1988 |
|
RU2034759C1 |
| Устройство для передачи пачки длинномерных изделий от транспортного средства к питателю | 1989 |
|
SU1684198A1 |

Изобретение относится к механизации погрузочно-разгрузочных работ, а именно к устройствам для укладки изделий в стопу. Цель-- упрощение конструкции. Устройство содержит установленные на стойке 1 блоки 3 и 4, один из которых огибается гибким тяговым органом 6 с подвешенной площадкой 5 для стопы изделий, а другой - гибким тяговым органом 7 М rz с закрепленным на ее конце противовесом 9. Гибкий тяговый орган 8 огибает вертикальную криволинейную направляющую 11. Нижний конец этого органа соединен с противове.ом в точке крепления гибкого тягового органа 7 к органу 8. В исходном состоянии площадка 5 находится в верхнем положении, а при подаче в него изделий для укладки в стопу опускается на одинаковую величину. При этом гибкий тяговый орган 6 наматывается на блок 4 и одноврейенно орган 7 наматывается на блок 3, обеспечивая подъем противовеса 9 и огибание органом 8 направляющей 11, поверхность которой выполнена в соответствии с линейной зависимостью между перемещением площадки и величиной равнодействующей силы веса противовеса и натяжения дополнительной тягн. 1.табл. 3 ил. I 5 сл 00 со CD Од
с /1
,деР(р)1, Q(p). (i,).
Общим решением этого дифференциального уравнения является следующее выражение:
sd,,Rp),,
так как Sp(p) ,
1 р, е - , то
(l-,.)dp.C,(|-.lp)
-Л-;.
где С, - производная постоянная.
Вид уравнения со.(р) зависит от выбора граничных условий. Анали показывает, что вывод конечных уравнений упрощается, если принять следующие начальные условия прибр 7/2, РО 0, тогда С,0 и
cose (1-р/2),
Y
где с - коэффициент жесткости; С„ - вес груза;
1 - полярный радиус, определяющий крайнее нижнее положени точки крепления тяг; р|9 - текущие координаты траектории точки крепления тяг.
Когда коэффициент жесткости устройства равен , тогда
cos9(l-p/2l) или (l-cos0).
следовательно
25
. |.
Так как радиус кривизны перпендикулярен касательной, то для его построения достаточно построить траек- торию перемещения точки крепления тяг по уравнениюр 21(I-созб), затем провести касательные под углом
е
Q - , соответствующим радиус-векторам и восстановить перпендикуляры к касательным. На перпендикулярах отложить отрезки, равные Н,и соединить их. Полученная кривая является рабочим профилем направляющей. Приведенная методика полностью соответствует правилам нахождения эвольвенты и эволюты.
Угловое положение радиуса кривизны можно задавать также углом Cf между ним и вертикально.
q 9U°-0°-o° 90- Ь.
В качестве примера рассмотрим построение рабочего профиля направляющей по следующим данным (в относительных единицах), приведенным в таблице.
Принимаем мм. Строим по дан- ным графы 1 и 2 кривуюр 21(l-cos9), проводим через концы радиусов-век - торов вертикали и лучи под углом cf к ним (графа 4) На этих лучах строим отрезки R (графа 3). Соединяя концы отрезков, получаем рабочий профиль направляющей.
Формула изобретения
Устройство для укладки изделий в стопу, содержащее раму, подвижную в вертикальном направлении приемную площадку, связанную с одним концом первого гибкого тягового органа,огибающего смонтированный на раме блок, криволинейную направляюпото, связанную с рамой, и противовес, связанный с первым гибким тяговым органом и поикрепленным к одному концу оги3 7
Q3U1.2
бающего криволинейную направляющую второго гибкого тягового органа, другой конец которого жестко прикреплен к последней, отличающееся тем, что, с целью упрощения конструкции, криволинейная направляющая вьшолнена незамкнутой, жестко закреплена на раме с размещением ее концов на разных уровнях, другой конец второго гибкого тягового органа жестко прикреплен к направляющей в зоне ее верхнего конца, а первый соединен с другим концом первого гибкого тягового органа.
бидА
8
фиг.З
| Авторское свидетельство СССР № 761398, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
