со со o
ел
Изобретение относится к н/а.хтному (юл ь- ему, и именно к управлению рабочим торможением шахтных подъемных ма1нин с пру- жинно-пнеЕшатическим и нружинно-гидрав- .1ически 1 11)иводами тормоза.
le.Th изобретения повышение безонас 11ОГ1И работы юдьемной установки за счет orpaiiMMefiHH величины тормозного момента при скоросги движения гюдт.емной ман1ины по. и.ик й. чем безопасная скорость резкого ;ч)1мож141ия.
На чертеже представлена принципиальная схема устройства для управления рабочим торможением шахтрюй под ьемной машины.
Уст|1ойство состоит из сельсинного коман- .loaniiapaia 1, напряжение с которого вы- п)ям.1иется по; у провод пиковым выпрямите- .м м 2 и подается па обмотку 3 управления peiy;iHTO|)a давлепия. Па)алле;1ьпо обмотке 3 у||рав.1ения подключен блок 4 фор- мл)ов,ч11ия сигна.кч ограничения тормозно1 () момента, нитаппс и управ.тенпе которо.о осу- П1еств.;|яется от чахогенератора 5, кинема- тическа свя(анно1() с органом навивки, злок 4 форми 1(вапия сигна. 1а (пфаничения то|)- Motnoio момеша содержи-т конденсатор Н для С1.1ажнва11ия пу.тьсирующегч) напряжения, IKICTупаюпцчч с по.тупр()водниковог о вьшря- м;1Г(-. 1я 7. и обеспечения но)мал1.ной )або- 11,1 С1абилитрона 8, Н .шсторы 9 и К) д,;1я установки сгабил()НОГ() напряжения на бачс г)апзис 1 ора 11, диод 12 для коммугации | :ап)яж(Ч111Я на обмотке уп)ав, 1епия и |)с- ч.итор 1,4 ;1ля ycranoiiKH зпачения бе.«)пас- ()с-;-и peiKoi o торможения.
NHTpoiic i во )аботаст слсмуюгцим образом.
В случае peiKoi o вк,:|К)чепня мап1И}1ис ЮМ рабочсг о KHiMo ia пап)яж( на выходе ||(JЛ ) uinK(iBoro вь1п;)ямителя 2 надает .ю . 1и. П)и ск11 1ости движения под1,емкой MaiiiiiHi.i .|ей, чем бе.чопасная ско- , рсчк(|-о торможения пап яжсния с та огенерато|)а Г) преобра.чустся в Плокс 4 форми 1()вания , 1а о|)апнче- пия тор озно1() момента и нодаетея на об- моткч 3 управ.к ния. Так как нап)яжснне fia б,ч;н гран. ии т ())а 1 иостспппю и опре- . К . 1Я1 ;ч-я параметрами рс.зисторов 9 и К) и стабилитрона 8, падение папряж(М1Ия на т()по-к(1. i. ieKTOpHOM т)ан.чист()ра i 1 оГк.ч пе мп ает стаби. значение нанряже- ния на обмотке 3 , 1еппя и соот- ве ic i тормозп;)го момента. скорости 1В11Ж1Ч1ия мо.чг.смиой ман1ин1.1 MCHi nieii.
0
5
0
0
i
0
5
чем безопасная скорость резкого торможения, напряжение с выхода тахогенератора 5 уменьн1ается и вызывает соответствующее уменьшение напряжения на обмотке 3 управления и плавное увеличение тормозного момента до максимального значения, необ- ходи.мого при стопорении.
Ре1Л лировка предела ограничения тор- .мозно о момента осуп1еетвляетея резистором 10 и для каждой конкретной подъемной установки определяется из условий выполне- пия необходимой характеристики замедления нри нод ьеме груза. При этом в зоне допустимых .значений тормазно1 о момента оперативность управления рабочи.м тор.мозо.м не у.удп1ается.
1;1е.чо11асная скорость ре.зкого торможения зависит от параметров под ьемпой устан(жки и находится в пределах 0,3 1,2 м/с, а ее соответствие допустимому тормозному моменту устанавливается резистором 13.
Так как напряжение fta обмотке 3 управления ре1 у,:|ятора давления определяет значение тормозно|-о момента, то значение тормозного момента при скорости движе}И1Я нод|,емной мап1ины бо,, ч( М безопасная скорость резко1 О торможения, ограничивается чначение.м, не вызываюп им появле- пия замедл(Ч1ИЙ, нревьппак)П1.их допустимые.
11спо.1ьз() нредлагаем(лч) уетройст- fia но сравнению с известным позволяет иск. 1К)чит1 набегание сосуда на канат для барабанн1 1Х подт,емных установок и п()о- ска, 11. канатов по ведун1ему П1киву Д.1Я установок со шкивом трения без уве,1и- чения ипери.ионности тормозной системы и гем сам1)1м новысить безопасность уксн,;|уа- тации 11од 1 емных установок при рабоче.м торможении.
Формул а изобретения
Ус1)ойсгво д, 1я yпpaвлelп я рабочим тор- можение.м шахтной под 1 емной мапжны, со- дсржа1пее сельсинный командоанпарат и ремлмятор давлепия с обмоткой управ,, подключенной к выходу блока формирования сигна.та (Л раничения тормозного момента, и тахо енератор, кинематически связа}1пый с o|)ian(.)M навивки под ьемной мапшны, от- личакпцесся тем, что, с целью повышения безопасности, вход блока формирования сиг- на, 1а ограничения тормозного мо.мента соединен с тахогенератором, а об.мотка хправ- . 1епия регу, 1ятора давления связана с вьгхо- И)м коман.тоаппарата.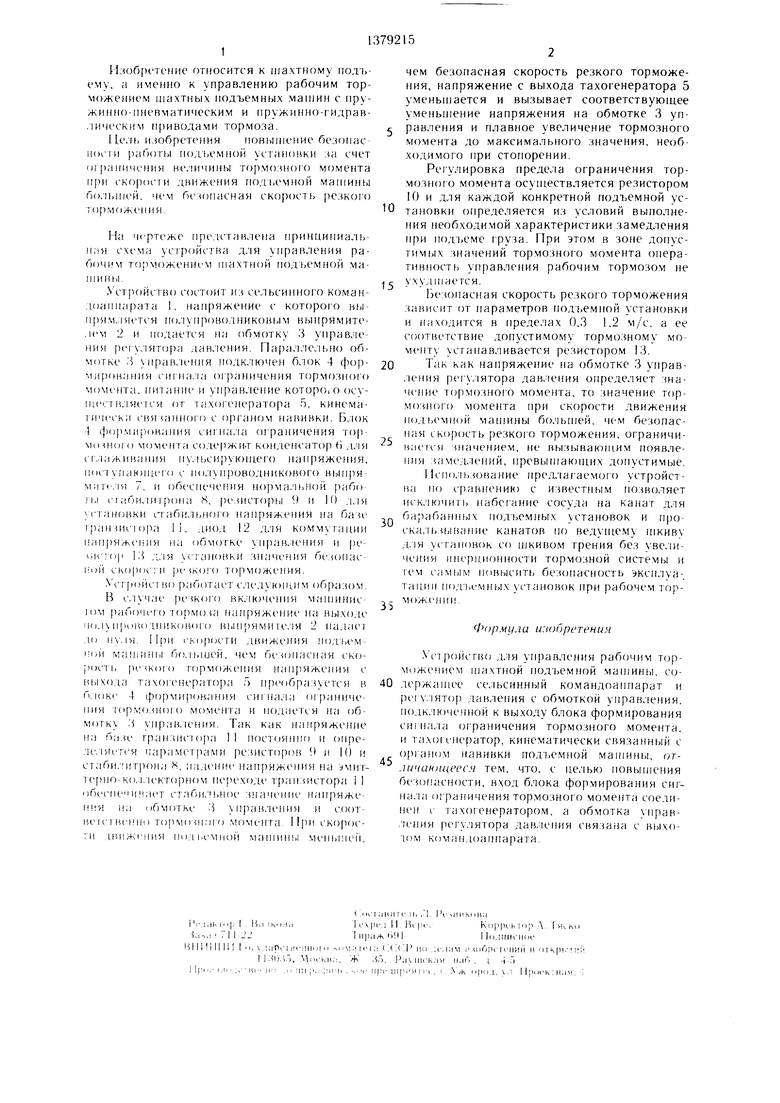
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрический ограничитель скорости подъемной машины | 1981 |
|
SU1237595A1 |
| Устройство для управления рабочим торможением подъемной машины | 1980 |
|
SU962169A1 |
| Устройство для управления электроприводом шахтной подъемной машины | 1985 |
|
SU1237593A2 |
| Система автоматического управления шахтной подъемной машиной с асинхронным электроприводом | 1979 |
|
SU893778A1 |
| Устройство для управления тормозом шахтной подъемной машины | 1985 |
|
SU1379216A1 |
| Устройство для точной остановки подъемного сосуда | 1960 |
|
SU136021A1 |
| Устройство для управления предохранительным торможением подъемной установки | 1975 |
|
SU753761A1 |
| Система управления тормозом шахтной подъемной машины | 1981 |
|
SU948869A1 |
| Устройство управления наклонной шахтной подъемной установкой | 1980 |
|
SU891550A1 |
| Система управления тормозом шахтной подъемной машины | 1983 |
|
SU1180350A2 |
Изобретение относится к устройствам для управления рабочим торможением ша.хт- ной подъемной машины и обеспечивает безопасность работы подъемной установки. Сельсинный командоаппарат 1 через полупроводниковый выпрямитель 2 соединен с обмоткой 3 управления регулятора давления. Параллельно обмотке 3 управления подключен блок 4 формирования сигнала ограничения тормозного момента, питание и управление которого осун1ествляетс-я от та- .хогенератора 5, кинематически связанного с органом навивки. В случае резкого включения мапгипистом рабочего тормоза напряжение на выходе полупроводникового вьп1ря- мителя 2 падает до нуля. При скорости движения подъемной мап1ины болыпей, чем безопасная скорость резкого торможения, напряжение с выхода тахогеператора 5 пре образуется в блоке 4 формирования сигнала ограничения тор.мозпого момента и подается на обмотку 3 управления. Так как напряжение на базе транзистора 1 1 постоянно и определяется параметрами резисторов 9 и 10 и стабилитрона 8, падение напряжения на эмиттерно-колллекторном переходе транзистора 11 обеспечивает стабильное значение напряжения на обмотке 3 ynpaB.ie- ния и соответственно тормозного момента. I ил. (О (Л
| Устройство для управления рабочим торможением подъемной машины | 1980 |
|
SU962169A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
