. п
00
.//
CAJ Х N3 N3
N:)
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1985 |
|
SU1379230A1 |
| Грузозахватное устройство | 1988 |
|
SU1525109A1 |
| Захватное устройство для грузов с фигурной головкой | 1987 |
|
SU1525111A1 |
| Грузозахватное устройство | 1984 |
|
SU1237607A1 |
| Самоотцепляющееся захватное устройство | 1986 |
|
SU1381055A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Самоотцепляющееся захватное устройство | 1986 |
|
SU1379226A1 |
| КРАН-ШТАБЕЛЕР | 1972 |
|
SU419469A1 |
| Грузозахватное устройство | 1977 |
|
SU695943A1 |
| Захватное устройство | 1989 |
|
SU1726351A1 |

07 J
Изобретение относится к пол ьемно-тран- спортной технике, в частности к механизмам фиксации положения захватных органов г рузозахватных устройств.
lU .ibK) изобретения яв,-|яетея повышение належности.
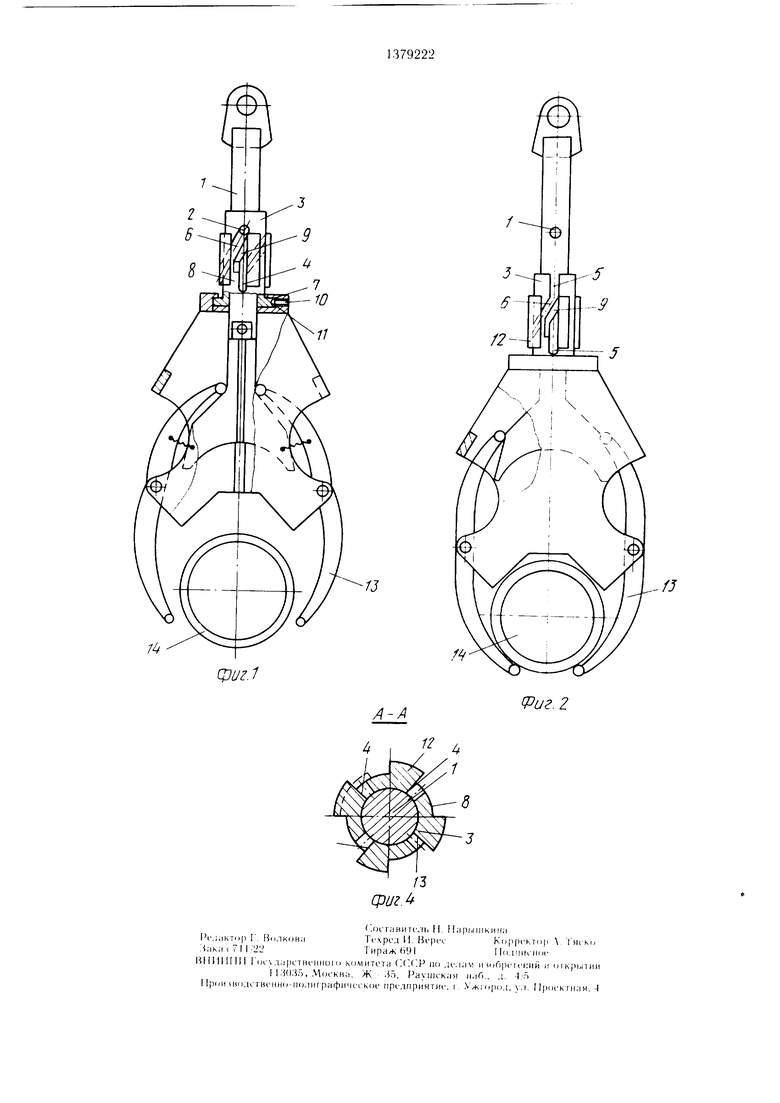
На фиг. I показан механизм ф1Н санин при раскрытом по. южении захватных органов I рузозахватно1Ч) устройсгва; на (})И|. 2 то же, нрн закр1 1том ноложенни захватных органов грузозахватн()1() усг|К)йсгва; на фнг. 3 промежуточное положение механизма ()нксапии при закрытом положении захватных органов грузозахватного уегрой- на фиг. 4 сечение Л Л на фнг. Н.
Л еханизм (f) икса пи и н()ложе1П1я захватных opi-anoB грузозахватного устройства со- .и |)жит ве)тикал1)Нук) 1птан1 у 1, закрен.тен на пей Ha. KMi 2, вертика. Игную вгу.тку ,Ч с ограпнче |ными и верхпнх частях верти- ка. iinifjiMH пазами 4. neoi раниченньгми в верхних частях Р ертика.тьньгми па.игми 5 и сопря- женпыми е ними наклонными пазами fi. Кроме Toi o. па иту.чке 3 вьпю.тнены |-пе.1ла 7 fi нижней части и ертика,1ЫП)1е 1нлип1 | . перекрьп)ак)1пие пижние конпы нак.тонных пазои (). Прн :)том в .местах сс)пряжепня нак.юнных пазов ( с вертнкальными пазами 4 и о с в().1.можност11К) перекр1 1тия наклонн1,г пазов () П1арнирпо закреплены н.танки 9, а механп.ш (})иксапин положения захватр1ых органов голе)жкт также полпружннепный 1 пжиной 10 Н1арик II, 1Н.ТИПЫ 8 вту, 1кн Ч пора (ук)тся выступы 12.
ЛАехапизм |))ИК1 апии положения .(ахваг o iiaiioB 1)узозахнатно|() )йс 1 ва ра- оотае 1.мелук)|цнм образом.
Illrania 1 опускается вниз, (Ч na.ien 2 с Ко.1Ь(иг спача.та по плапке 9, а затем по нак/юппому пазу fi, н noB(j ia4HBaeT при зтом ве)тика,1Ы1ук) нту. 1ку 3 на 9П н попа лает в Н 1)тнка. П) на.) 4. 11)Н оо|1агном холе пгангп 1 па.чеп 2, лвнгаясь ю кальном} неограниченному пазу и, нрипол0
3
0
5
0
FiHMaeT планку 9 и безнрепятственно выходит из него. При это.м захватные органы 13 находятся на грузе 14. Втулка 3 в данном положении фиксируется с помощью шарика 1 I и пружины 10.
При опускании груза 14 происходит аналогичный процесс: Н1танга 1 заставляет па- ец 2 скользить по планке 9, а далее по паклонному пазу 6, проворачивая втулку 3 еще на 90. При этом палец 2 попадает в вертикальн1)1Й ограниченный паз 4. Захватные органы 13 размь1как;1тся. При дальней- П1ем под ьеме Н1танги I палец 2 попадает в ве)хний копен ограниченного вертикал|,погD naia 4. Далее, вместе со н|тангой 1 поднн- мается вертикальная вту,тка 3. Захватпые орга( 13 остаются кгзо.мкпутыми.
Формула и.чобретенця
Mexann.fM (()нксацпи положения захват- Р1ых органов г рузозахват)гого устройства, со- держаншй соединяемую с корпусом грузо- захватпого уст|)ойства вертика.чьную nnani-y, жестко .закрепленный ira ней нерпе(Г и1куляр- 110 ее оси пален, вертика, 1ьную вту.чку с че|)едукинпмнся ог)аниченными и неограпп- чеппыми в ве|)хпих частях ве)тика.1ьпымн на.)ами и сонряже1П1ыми с ними нак, 1онны- ми на.чами, огличинпша а я тем, чю, с цельк) Н()1 1П1епия належности, вт.1ка выпо.шена с гпезламп li нижней части и в( ртпка,1ЫП) П1, 1нпамп, расположепнымп с во Можпост1 К) П(.)(к)ьгг11я пиж11их КО1П10В н, 1К, 1он1Н)Гх па зов, а механизм ((ижсапии спабжеп шар- 1П1)по акр1 П,1енп1,1мп в ;ес1ах сопряжения нак,1онпьгх па JOB (. ие|)тика,1ьньгми назами (. возможностью пг)екры гпя пос.1едпих п в.)аимодейсгвия с BiiicrynaMH, ()Г)ра.и)ва(П1ы.мн п|,1нцами firy.iKH, планками и усганавливае- мым в корпусе I руз().(ахват11()го устройства модпруж1мнчп)ым niapnKOM д, 1я взанмоде - ствия с 1 пездамп н 1.1кн.
74
Сосгавшг. П 11. IhipbiiiiKnii. i
iMiiKTo) I 15(i, iKOHiiТсхрод И. ВергсKo()()i h7(ip Тясм)
-Чпкп i 7 I I/L L Тираж (i9 II (цшкчшс
lUllllinil l (K- .ijipcTiK UHOi (I комитета C((.P no лсмам и (кбрск сий и открытий
I I ЗО.Чо, Москна, Ж 35, Раушская наб., л. -(.о 11рои (ио. К тнснно-полиг рафичсское ирслприятш , i Ужгорол, .i. Проектная. А
/
(Риг. 2
сриг.
