Изобретение относится к подъемно-тран- епоргному ма11 иностроению, а именно к грузозахватным устройствам.
Цель изобретения - повьиненис надежности работы устройства.
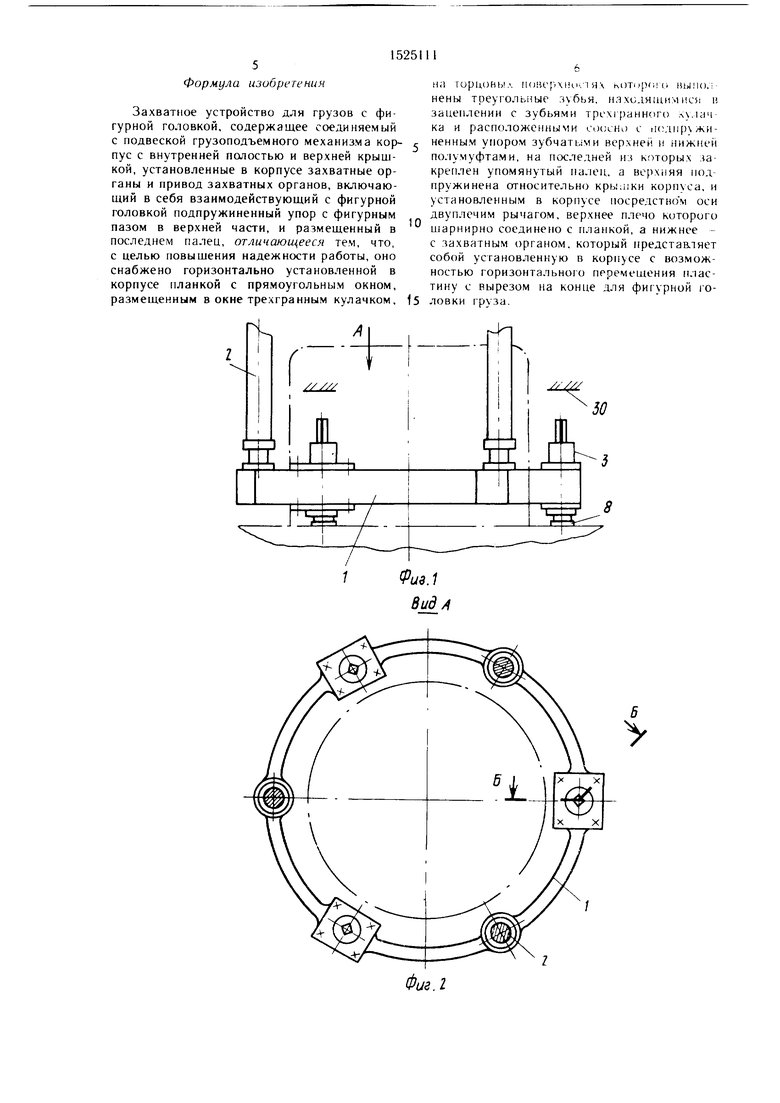
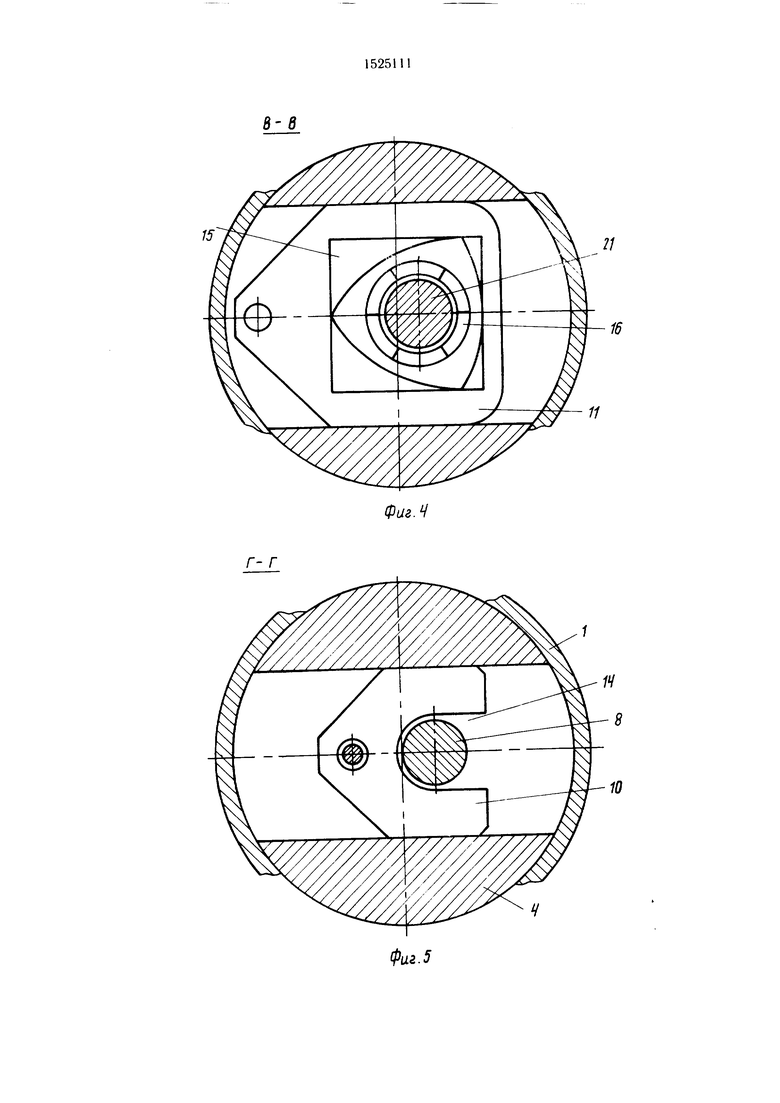
На фиг. 1 изображено захватное устройство, обнп111 вид; на фиг. 2 вид .Л ни (j)iir. I: на ())И. : сечение П Ь на (j)ii: . 2 (aBTt)M а 1ическая за.хватная 1Ч)Л()вка); на фн. 4 сечение В В на фиг. 3; на фиг. о - сечение Г Г на |)иг. 3; на фи|. 6 уст- ройство с упорными рычагами. обн1ий вид.
Захвагнос устройство содержит нодвес- ку 1, нрикренленнук) к нриводным штокам 2, на котором установлены захватные о)ганы - ()матические беснриводныс захватные юловки 3. .Лв юматическая захва1мая го- . 1овк;| со.К ржит K(.)piiyc 4 и крьинки 5 и 6. В .) выно.чнено нанравляюиюе конусное отверстие 7 для захода штырей iS груза. Корпус 4 нмеег два паза 9, в которых )аспо- ложень несуни1Я планка 10 и унравляк)Н1ая нласгина il, связанные между собой двуплечим 1ь,:ча1()м 12, усгановленным на оси 13. 11ссун1ая планка К) содержит вырез 14, а в мравлякмцей пластине 11 выполнено
прямое П). п.ное окно 1Г). в котором )азме1це1
трех )анный кулачок 16, на TopuoBijix п()ве})- носгях K()Topt)ro выполнены зубцы 17 и 18 разною направления. В зацеплении с Kyjia i- ко.м И) находятся две зубчатЬ)1е полумуфгы - нижняя 19 и верхняя 20, распо. юженные со осно с мюром 21. который че)ез п п жипы 22 и стакан 23 упирается в корпус 4, зубчагая полумуфта 19 закреплена на под1нинпике 24 и имеег палец 25, входящий в паз 26, выпол- ненны11 на yiiope 21. Паз 26 выполнен по ви)(- говой линии с прямо.тинейным участком на концг. )чатая |(1,(()та 20. пл / Л ая внутренние н)ямолинейные па;;,; 27. средством птифта 28 связана с уп(:))пм 11, при iTOM она че)ез пружину 29 .пи)ае1ся в стакан 23. Верхняя часть унора 21 выпол1{е на в виде четырехгранника и вых(;дит из а11ал()() отверстия в крышке i l наружу. Над захватными го. кшками 3 расно.тожсны жесткие, регулируемые уиоры 30. выгюлнен- ные в виде двуплечего рычага 31, ус1ановлен- ного на оси 32 на основании. Рычаг 31 на- ходи гея под воздействием пружиш. 33, а его неремен1енис о| раничено огра}1ичите, 34. На нижнем плече рычага 31 ч -танов.сн ро;1ик.
У rrpoiicvBo работает .гvI образом.По.твсску 1 с помощью 11|)ив()Д11Ьгх 1нго ков 2 О11 екают на груз. Го.товкя ( воз.тейсгвуют на сферическую rioBepxHocib упора 21. |)и этом ностунательпое движение упора 21 посредством винтовси о паза 2i) па нем и пальца 25 в зубчато нолумуфтс 19 1реобразуется во врашате.чьнос ..чвиже- пи, Hoc,, которая, находясь в зацеп
Q
0
5
0 5 5
5
лении с трехгранным кулачком 16, поворачивает (Д о в окне 15 управлиюпгей 1. астины 11 и ереме цает ее в пазу 4. Переме- шени(. )авляюц1,ей цл,:1 1инь 11 ос редст- ио.м Д11унлечеп) р зчага 12 передается несушей ц. 1анке 10, Kti;i)(,v перемешается в lui- у Корпуса 4 и ,|.-т )i)b 8. Зубчатая п(.|,муфга 20 на .-(кш -л апе работы прицод- ннмается и п)()ска.-, I saei, .жимая 1 29. Затем цриводными пг.ока.ми гюдни.ма (ОТ 11ОД1и (-к 1 с iii головки ц; П) - i :: I ; ,. ,. -I I О, Niiop 21 :io,i .iciiv i i.iic -. H 22 пере.ме- шаегси вн1,з, a зу()чатая 1и,л муфта 20 npo- В |)с1чи iaci ся, ее зубш Н)оскальз1)1вают io зубцам ку,тачка 16, который держивается от )ворота за счет сце ления его с нолумуф- ой 19. Нодьем подвески I роисходит ,то касания упоро В 21 С упора VUI 30, нос.те чс о груз надежно зафиксирован планкой 10 и упором 21 и с ним производить манипуляции. :сли 30 вы олнены в виде )в iU, то нри О1 ускании юдвески 1 на руз )ычаг 31 первыми 1ираются в ную повер.хность и. поворачиваясь вокруг оси 32. освобождают )ций четырех- конец 21 и таким образо.м соз- даюг ус/ювия для с)абатыва ия захватных Ч)ловок 3. Пос.те iToro 1ривод 1ые штоки 2 | од 1имают подвеску 1 с рузом и упоры 21 (Л1ускак)тся, а рыча1И 31 дейспп см ;j)y жпн 33 возврап1;ч г1 .-v , , .пдное по. южси. и- до (()(м:м 01. -i .11 )анич ггелем 34 и
:О| . ; ;j;iil :
/1ля того, чт(.|б ось()бодить груз достаточно V 10М1)1Ц)К) :1рив ) iiTOKo i 2 оцусТИТи С ,11) упора в ОВе()ХНОС 1 Ь, 1рИ
упо|1 2 : Ncpi Memae i ся вверх п ш.ч редством ВИП-10ВО1Ч) паза 26 на нем и 1ал1,:а 25 в л бчаго полумуфте 19 поворачивает ее и кулачок 16, находя цийся с ней в .. Кулачок 16 еремещает )ляк)дую 1ластину I I в цазу корпуса 4, а она через рыча 12 1ереме- шае .ую 10 в цазу корпуса 4 и в)1водит ее изчюд штыря 8. Зубчагая полумуфта 20 на этом этане работы принодни- .и роскальзываег, сжимая пружину 29. Далее, п()(. штокн 2 поднимают подвеску 1, а угыр 21 1ереме1цается и;д дейст 5 1ем п1)ужи,ны 22 вниз, пр жорачивая ,;убча: 1о ||:/, умуфту 19, при -JTOW ::ол(.1жекпе кулач ча 6, управляющей пластины 11 и iie(-ynu- И) пе меняегся, т.е. зах- . головка 3 оста . огкр1)ГГО11 i OTO- )ой к захвату руза.
Изобрете 1ие ()бесг ечивает надежное удержание груза с фигурной головкой, исключает ) 1рО 13ВОЛЬ уК) ОТСТ liH К .
Формула изобретения
Захватное устройство для грузов с фигурной головкой, содержащее соединяемый с подвеской грузоподъемного механизма кор- пус с внутренней полостью и верхней крышкой, установленные в корпусе захватные органы и привод захватных органов, включающий в себя взаимодействующий с фигурной головкой подпружиненный упор с фигурным пазом в верхней части, и размещенный в последнем палец, отличающееся тем, что, с целью повышения надежности работы, оно снабжено горизонтально установленной в корпусе планкой с прямоугольным окном, размещенным в окне трехгранным кулачком,
на торцоныл ii()Be iXiuii. I Ял котирг.ги luwno.i нены треугольные зубья, нлходящилп .ся и зацеплении с зубьями трем ранного xy.ia t- ка и расположенными COOCHD с ri(;;iiip жи- ненным упором зубчатыми верхней и нижней полумуфтами, на последней ми кг торых ;ia- упомянутый na.ieu, а верхняя нод пружинена относительно крь. корпуса, и установленным в корпусе посредстно м оси двуплечим рычагом, верхнее плечо которого шарнирно соединено с планкой, а нижнее - с захватным органом, который предстаьтяет собой установленную в корпусе с возможностью горизонтального перемещения пластину с вырезом на конце для фигурной j o- ловки груза.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват для кабин | 1984 |
|
SU1221176A1 |
| Захватное устройство для грузов со штырем и фигурной головкой | 1986 |
|
SU1525110A1 |
| Захватное устройство для грузов, снабженных штырем с фигурной головкой | 1973 |
|
SU542709A1 |
| Захватное устройство для грузов сошТыРЕМ и фигуРНОй гОлОВКОй | 1979 |
|
SU816935A1 |
| ТЕЛЕСКОПИЧЕСКОЕ ПЕРЕГРУЗОЧНОЕ УСТРОЙСТВО | 1990 |
|
SU1837550A1 |
| Захватное устройство для грузов с фигурной головкой | 1977 |
|
SU727553A1 |
| Захватное устройство для грузов с головкой | 1987 |
|
SU1519996A1 |
| Грузозахватное устройство | 1990 |
|
SU1773846A1 |
| Подвеска подвесного толкающего конвейера | 1977 |
|
SU673549A1 |
| Захватное устройство для грузов | 1980 |
|
SU965949A1 |

Изобретение относится к подъемно-транспортному машиностроению, а именно к грузозахватным устройствам. Цель изобретения - повышение надежности работы устройства. Захватное устройство для грузов с фигурной головкой содержит корпус 4, в котором установлены несущая планка 10 и управляющая пластина 11, соединенные между собой двуплечим рычагом 12. В окне управляющей пластины 11 расположен треугольный кулачок 16 с зубцами 17 и 18, в зацеплении с которыми находятся верхняя 20 и нижняя 19 зубчатые полумуфты, расположенные соосно с подпружиненным упором 21. При захвате груза упор 21 взаимодействует с головкой штыря 8 и через фигурный паз 26 и палец 25 вращает муфту 19, которая через кулачок 16, управляющую пластину 11 и рычаг 12 перемещает несущую планку 10, которая входит под нижнюю поверхность с головкой штыря 8, фиксируя ее положение. Освобождение груза происходит в обратной последовательности. Принудительное срабатывание несущей планки исключает неправильный захват груза и его произвольное освобождение. 6 ил.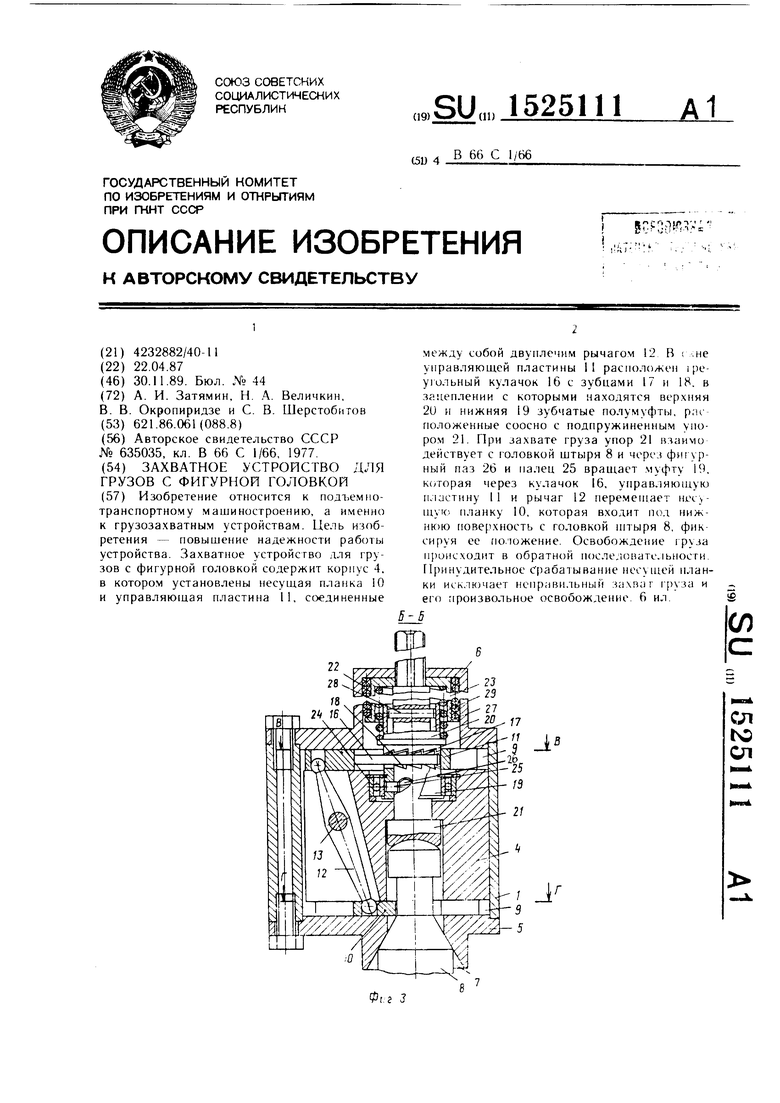
11
Фиг.ч
10
Фиг. 5
V Ч 4 4 4
Фиг.6
| Автоматический захват для грузов с захватным штырем и фигурной головкой | 1977 |
|
SU635035A2 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
