короткозамкнутым ротором) подключен через нормально разомкнутые контакты 14 магнитного пускателя 12 к сети переменного тока (трехфазное напряжение, 380/220 В), Причем контакт 10.1, в свою очередь, включен последовательно с одним из контактов магнитного пускателя 12. Электродвигатель 13 через датчик 8 механически связан с крановой тележкой 5, к которой на гибком подвесе 16 подвешен груз 17.
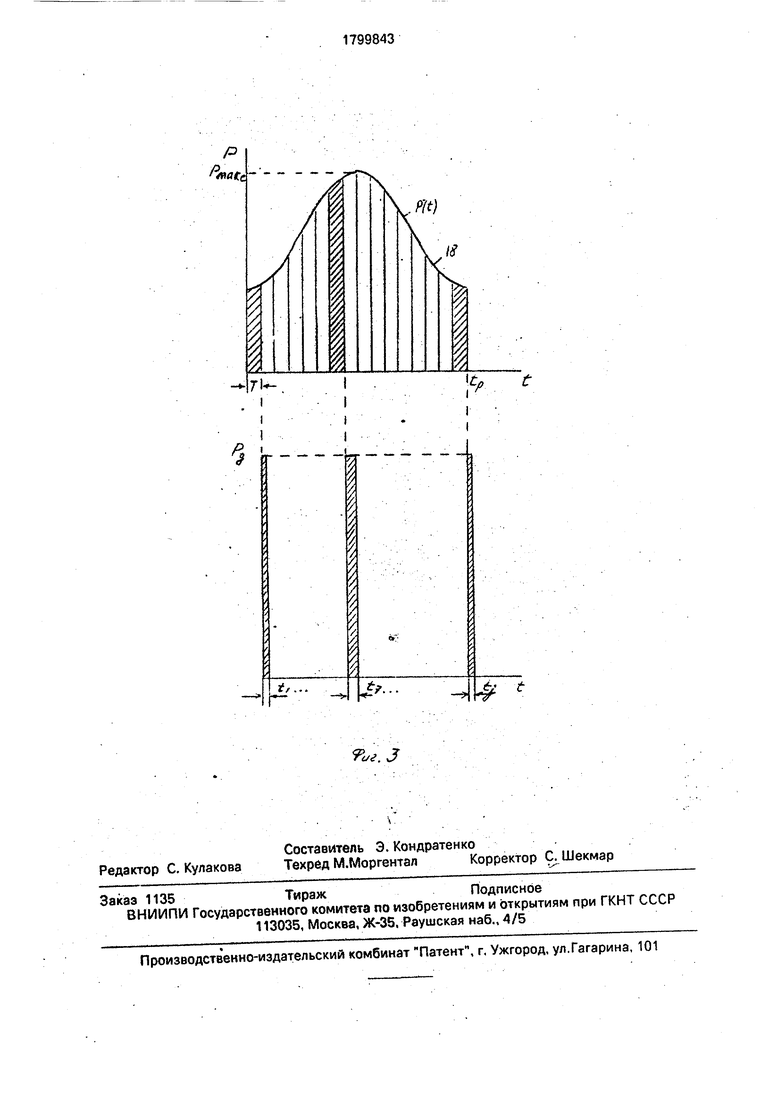
На фиг. 3 зависимость изменения внешнего избыточного усилия P(t) изображена в виде кривой 18, его максимальное значение - Рмакс и усилие, создаваемое электродвигателем 13, Рд.
Временные интервалы, в течение которых действует усилие Рд обозначены t 1..., t.... ti, время разгона to.
Устройство .работает следующим образом. .: . .
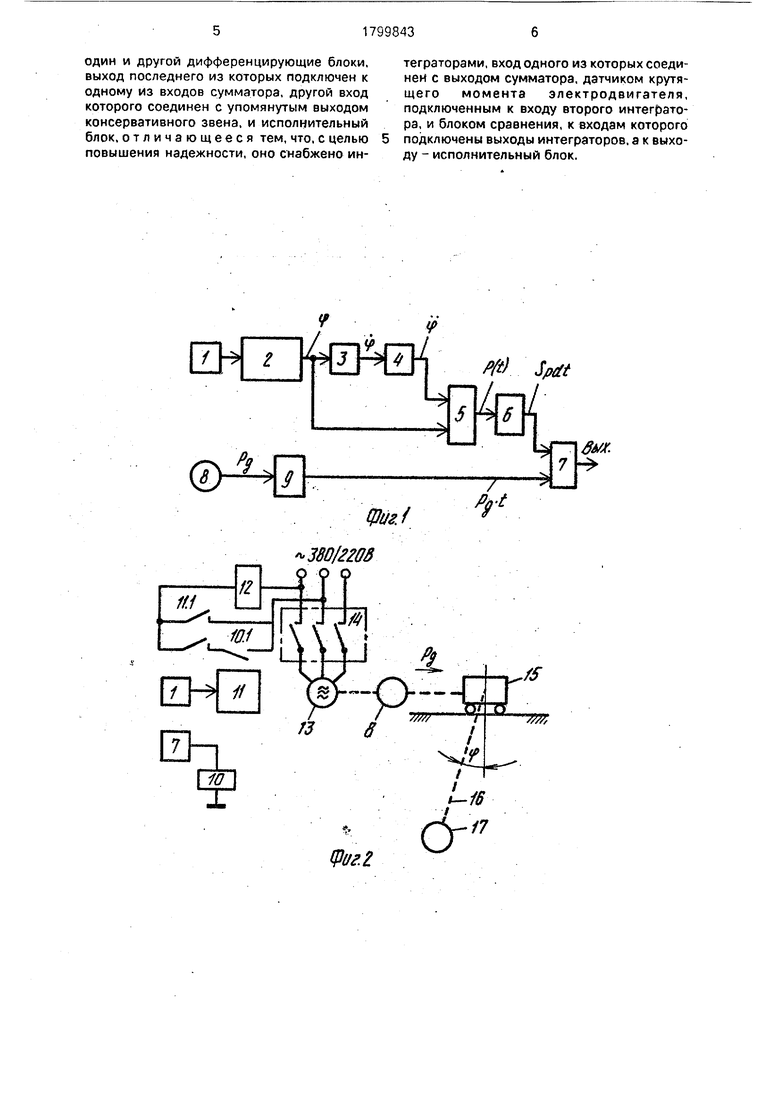
В момент начала разгонз(определяется по циклограмме грузоподъемной машины) крановой тележки от командоаппарата 1 на вход консервативного звена 2 поступает управляющий сигнал, представляющий собой . импульс напряжения постоянного тока прямоугольной формы. Для формирования такого импульса-достаточно иметь источник напряжения постоянного тока и любое из известных программно-временных устройств (например, реле времени программное).
Управляющий сигнал поступает на вход консервативного 2.
При помощи дифференцирующих блоков 3 и 4, а также сумматора формируется сигнал, соответствующий внешнему избыточному усилию P(t) 18, изображенному на фиг. 3. Необходимость введения в устройство блоков 2-5 можно довольно просто объяснить, если найти усилие Р.
Сигнал с выхода сумматора 5 интегрируется в первом интегрирующем блоке бис его выхода поступает на один из входов блока 7. Сигнал от датчика 8 крутящего момента интегрируется при помощи второго интегратора 9 и поступает на другой вход блока 7. При равенстве указанных сигналов на выходе блока 7 появляется сигнал, предназначенный для управления (при помощи соответствующих устройств) электродвигателем 13.
Таким образом, устройство автоматически формирует величину времени tj. При этом усилие Рд (момент), создаваемое электродвигателем 13, может иметь любой закон изменения. Это обстоятельство позволяет не принимать во внимание особенности реальной механической характеристики электродвигателя, не учитывать переходные процессы в его электрических цепях и т.д.
Для этого выход блока 7 сравнения подключен к реле 10, нормально замкнутый контакт 10.1 которого включен в цепь обмотки управления магнитного пускателя 12 (МП). Тот же или другой выход от командоаппарата используется для запуска таймера 11, в функции которого входит формирование ин0 тервалов времени Т (см.фиг. 3). Релейный контакт 11,1 таймера также включен в цепь .МП.
Итак, в момент ачала работы устройства от командоаппарата / на входы устройст5 ва и таймера 11 поступает управляющий сигнал. При помощи таймера через промежуток времени Т срабатывает магнитный пускатель 12 и подключает (при помощи контактов 14) к сети питающего напряжения
0 электродвигатель 13 (например, асинхронный с короткозамкнутым ротором, на валу которого создается крутящий момент, измеряемый датчиком 8 крутящего момента. Как только интеграл по времени крутящего мо5 мента (работа усилия Рд, действующего на крановую тележку 15) станет равным интегралу усилия P(t), срабатывает реле 10 и обесточивает обмотку управления Мп 12. Заметим, что нормально замкнутый контакт
0 10.1 включается последовательно с одним из нормально разомкнутых контактов (КМП) магнитного пускателя 12. А время, в течение которого контакт 11.1 таймера находится в замкнутом состоянии, должно быть мало,
5 т.е. по крайней мере меньше самого короткого интервала времени ti.
Кратковременные включения электродвигателя 13 благодаря большим массам крановой тележки 15 и груза 17 обеспечива0 ют плавное изменение скорости v и угла р отклонения гибкого подвеса 16 от вертикали. Тем самым обеспечивается разгон (за время tp) крановой тележки 15 до максимально ВОЗМОЖНОЙ СКОРОСТИ Умакс И ПОЛН06
5 гашение колебаний груза на гибком подвесе. Что же касается величины усилия Рд, создаваемого электродвигателем 13, то оно должно быть равно или больше Рмакс. Это достигается соответствующим выбором его
0 мощности, номинального крутящего момента и др., для чего можно воспользоваться типовыми методиками, приведенными в справочниках и пособиях по проектированию электропривода.
5 Фор м у изобретения
Устройство для управления электродвигателем механизма перемещения груза на гибком подвесе, содержащее командоаппа- рат, к которому через консервативное звено подключены последовательно соединенные
один и другой дифференцирующие блоки, выход последнего из которых подключен к одному из входов сумматора, другой вход которого соединен с упомянутым выходом консервативного звена, и исполнительный блок, отличающееся тем, что, с целью повышения надежности, оно снабжено интеграторами, вход одного из которых соединен с выходом сумматора, датчиком крутящего момента электродвигателя, подключенным к входу второго интегратора, и блоком сравнения, к входам которого подключены выходы интеграторов, а к выходу - исполнительный блок.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом крановой тележки с грузом на гибком подвесе | 1987 |
|
SU1572986A1 |
| Задатчик скорости механизма горизонтального перемещения груза на гибком подвесе | 1988 |
|
SU1646981A1 |
| Устройство для управления электроприводом горизонтального перемещения груза на гибком подвесе | 1987 |
|
SU1528719A1 |
| Устройство для управления электроприводом механизма горизонтального перемещения подвешенного на канате груза | 1988 |
|
SU1527134A1 |
| Устройство для управления приводом передвижения тележки с гибким подвесом груза | 1989 |
|
SU1684239A1 |
| Устройство для управления электроприводом горизонтального перемещения подвешенного на гибком подвесе груза | 1989 |
|
SU1645237A2 |
| Устройство для управления электроприводом горизонтального перемещения подвешенного на канате груза | 1986 |
|
SU1379238A1 |
| Устройство для управления приводом перемещения тележки с гибким подвесом грузозахватного органа | 1988 |
|
SU1558851A1 |
| Устройство для управления приводом передвижения крановой тележки с гибкой подвеской груза | 1991 |
|
SU1799844A1 |
| Устройство для управления электропроводом механизма горизонтального перемещения груза | 1985 |
|
SU1342866A1 |