1
(21)4402644/31-11
(22)04.04.88
(46) 07.12.89. Бюл. 45
(71)Киевский автомобильно-дорожный институт им, 60-летия Великой Октябрьской социалистической революции
(72)А.К.Афанасьев, В.К.Кулешов, Л.А.Крыжановская и М.К.Афанасьев
(53)621.873(088.8)
(56)Заявка Японии № 54-9378. кл. В 66 С 13/06, 1979.
(54)УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ МЕХАНИЗМА ГОРИЗОНТАЛЬНОГО ПЕРЕМЕЩЕНИЯ ПОДВЕПГСННОГО НА КАНАТЕ ГРУЗА
(57)Изобретение относится к подъемно-транспортному оборудованию, а именно к устройствам nnk управления электроприводом механизма горизонтального перемещения. Цель изобретения - повыпение точности демпфирования колебаний груза на гибкой подвеске. Устройство для управления содержит блок 9 перемножения, дифференцирующее звено 4, дополнительный сумматор
11, датчик 13 длины подвески груза и
задающее устройство 12. Поправка к скорости крановой тележки (электродвигателя) формируется путем перемножения сигналов с выхода дифференцирующего звена 4 и с выхода дополнительного сумматора 11, осуществляющего операцию суммирования сигналов с выхода датчика 13 и задающего устройства 12, При этом консервативное звено 2 соединено с входом дифференцирующего звена 4, а выход блока 9 - перемножения - с дополнительным пятым входом сумматора 3, первый, второй, третий и четвертый входы которого подключены соответственно к выходу программно-временного устройства
1,к выходу консервативного звена 2, к датчику 5 скорости электродвигателя 6 и к датчику 7 угла отклонения грузового каната 8, связанным с крановой тележкой 15„ Электродвигатель 6 включен в силовую цепь тиристорного преобразователя 10, вход которого связан с сумматором 3, а второй выход программно-временного устройства подключен к входу консервативного звена.
2.1 ил.
г
kn
СП
го
со
Изобретение относится к подъемно- транспортному оборудованию, а именно к устройствам для управления электроприводом механизма горизонтального перемещения груза.
Цель изобретения - повышение точности демпфирования колебаний груза на гибкой подвеске о
На чертеже изображена блок-схема устройства для управления электроприводом механизма горизонтального перемещения подвешенного на канате груза.
Устройство содержит программно-временное устройство (ПВУ) 1, имеющее два выхода, второй выход соединен с входом консервативного звена 2, а первый - с первым входом сумматора 3, Выход консервативного звена 2 соединен с вторым входом сумматора 3 и с входом дифференцирующего звена 4, . третий и четвертый входы сумматора 3 подключены соответственно к датчику J5 скорости электродвигателя 6 и к дат чику 7 угла f отклонения грузового каната 8, а дополнительный пятый вход - к выходу блока 9 перемножения; выход сумматора 3 соединен с входом тиристорного преобразователя 10, в силовую цепь которого включен электро двигатель 6„ Первый вход дополнительного сумматора 11 соединен с задающим устройством 12, второй - с датчиком 13 длины подвески груза 14, а выход - с вторьм входом блока 9 перемно жения, первый вход которого подключен к выходу дифференцирующего звена 4. Электродвигатель 6 кинематически связан с крановой тележкой 15.
Устройство работает следующим об- разом.
По сигналу от общей системы управления (не показана) грузоподъемной машины ПВУ 1 вырабатывает сигналы, которые поступают соответственно на первый вход сумматора 3 и на вход консервативного звена 2. Продифференцированный с помощью дифференцирующег звена 4 сигнал с выхода консервативного звена 2 умножается в блоке 9 перемножения на сигнал с выхода дополнительного сумматора 11 и подается на дополнительный пятый вход сумматора 3. Сигналы с датчика 5 скорости элек- тродвигйтеля 6 и датчика 7 угла f отклонения грузового каната 8 поступают н.а третий и четвертый входы сумматора Зо
Формула изобретения
Устройство для управления электроприводом механизма горизонтального перемещения подвешенного на канате груза, содержащее сумматор, первый вход которого соединен с первым выходом программно-временного устройства, второй вход - с выходом консервативного звена, третий вход - с датчиком скорости электродвигателя, четвертый вход - с датчиком угла отклонения грузового каната, а выход - с тиристорным преобразователем, в силовую цепь которого включен электродвигатель, кинематически связанный с крановой тележкой, при этом второй выход программно-временного устройства соединен с входом консервативного звена, отличающееся тем, что, с целью повышения точности демпфирования колебаний груза на гибкой подвеске, оно снабжено блоком перемножения, дифференцирующим звеном, задаюгцим устройством, датчиком длины подвески груза и дополнительным сумматором, при этом вход дифференцирующего звена, соединен с выходом консервативного звена, а выход - с первым входом блока перемножения, причем один вход дополнительного сумматора соединен с задающим устройством, другой вход - с датчиком длины подвески груза, а выход - с вторым входом блока перемножения, при этом сумматор снабжен дополнительным пятым входом, подклю- ченным к выходу блока перемножения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом крановой тележки с грузом на гибком подвесе | 1987 |
|
SU1572986A1 |
| Устройство для управления электроприводом горизонтального перемещения груза на гибком подвесе | 1987 |
|
SU1528719A1 |
| Устройство для управления электроприводом горизонтального перемещения подвешенного на канате груза | 1986 |
|
SU1379238A1 |
| Устройство для управления электродвигателем механизма перемещения груза на гибком подвесе | 1990 |
|
SU1799843A1 |
| Устройство для управления электроприводом горизонтального перемещения подвешенного на гибком подвесе груза | 1989 |
|
SU1645237A2 |
| Устройство для управления электропроводом механизма горизонтального перемещения груза | 1985 |
|
SU1342866A1 |
| Задатчик скорости механизма горизонтального перемещения груза на гибком подвесе | 1988 |
|
SU1646981A1 |
| Устройство для управления приводом передвижения крановой тележки с гибкой подвеской груза | 1991 |
|
SU1799844A1 |
| Устройство для управления приводом передвижения тележки с гибким подвесом груза | 1989 |
|
SU1684239A1 |
| Устройство для управления приводом перемещения тележки с гибким подвесом грузозахватного органа | 1988 |
|
SU1558851A1 |
Изобретение относится к подъемно-транспортному оборудованию, а именно к устройствам для управления электроприводом механизма горизонтального перемещения. Цель изобретения - повышение точности демпфирования колебаний груза на гибкой подвеске. Устройство для управления содержит блок 9 перемножения, дифференцирующее звено 4, дополнительный сумматор 11, датчик 13 длины подвески груза и задающее устройство 12. Поправка к скорости крановой тележки (электродвигателя) формируется путем перемножения сигналов с выхода дифференцирующего звена 4 и с выхода дополнительного сумматора 11, осуществляющего операцию суммирования сигналов с выхода датчика 13 и задающего устройства 12. При этом консервативное звено 2 соединено с входом дифференцирующего звена 4, а выход блока 9 перемножения - с дополнительным пятым входом сумматора 3, первый, второй, третий и четвертый входы которого подключены соответственно к выходу программно-временного устройства 1, к выходу консервативного звена 2, к датчику 5 скорости электродвигателя 6 и к датчику 7 угла отклонения грузового каната 8, связанным с крановой тележкой 15. Электродвигатель 6 включен в силовую цепь тиристорного преобразователя 10, вход которого связан с сумматором 3, а второй выход программно-временного устройства подключен к входу консервативного звена 2. 1 ил.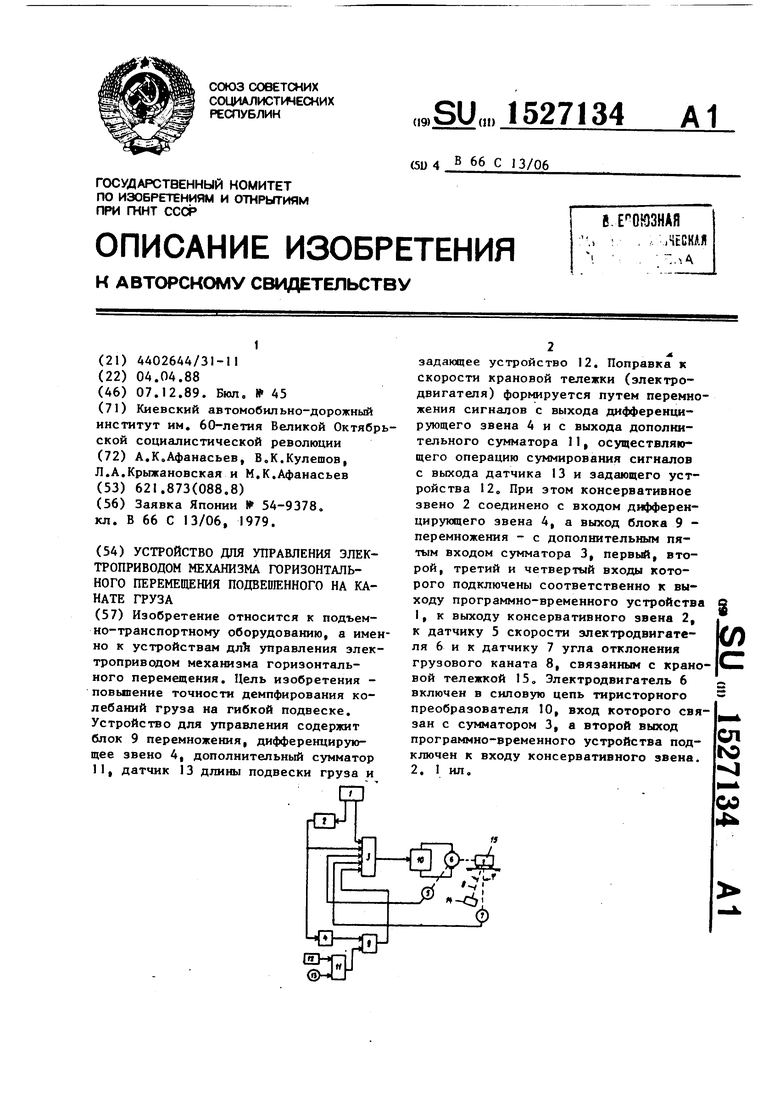
Составитель А.Логачев Редактор Н.Яцола Техред М.Дидык Корректор М.Максимищинец
Заказ 7468/28
Тираж 628
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Подписное
