Изобретение относится к подъемно- транспортному оборудованию, а именно к устройствам для управления электроприводами горизонтального перемещения груза.
ИРПЦ ичоВпртения - повышение точности.
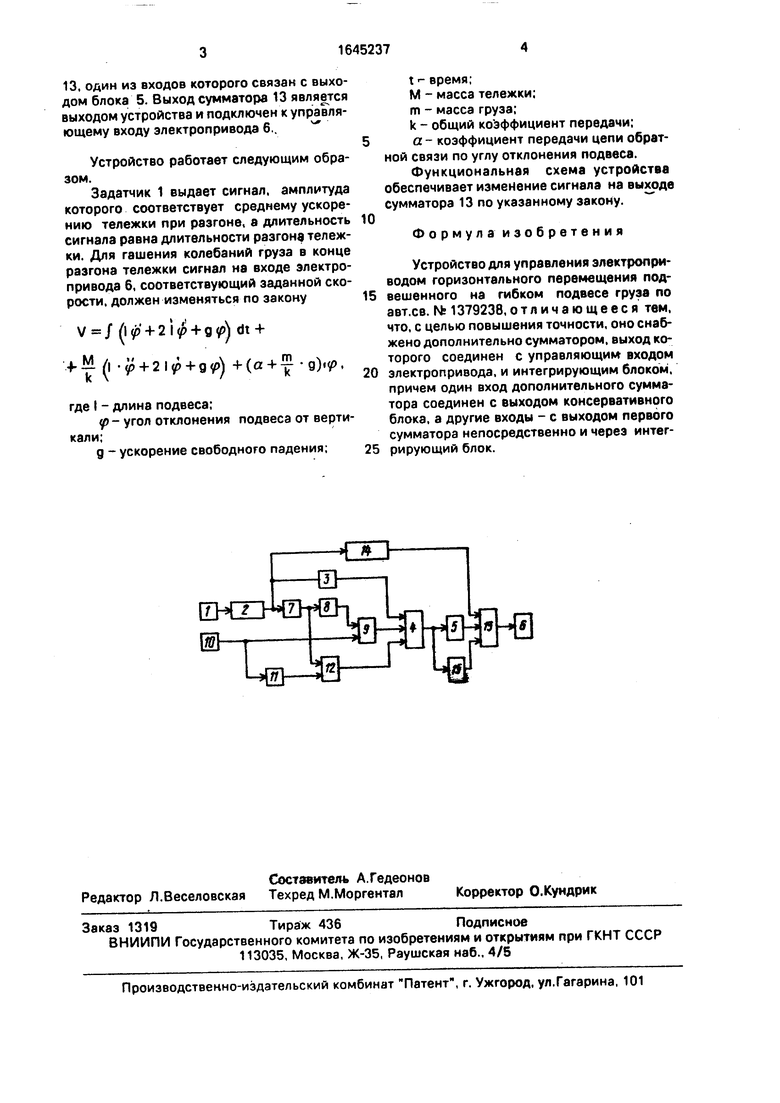
На чертеже приведена функциональная схема устройства.
Устройство для управления электроприводом содержит задатчик 1 управляющего импульса, соединенный с входом консервативного блока 2. выход которого через усилитель 3 соединен с первым входом сумматора 4. Выход сумматора 4 подключен к входу интегрирующего блока 5, связанного с управляющим входом электропривода
6. Выход блока 2 через последовательно соединенные дифференцирующие блоки 7 и 8 подключен к первому входу блока 9 перемножения, к второму входу которого подключен датчик 10 длины подвеса груза. Устройство содержит также дифференцирующий блок 11. вход которого подключен к датчику 10. а выход - к второму входу блока 12 перемножения. Выходы блоков 9 и 12 соединены с вторым и третьим входами сумматора 4. Устройство содержит дополнительный сумматор 13, дополнительные усилители 14 и 15. причем вход первого из них подключен к выходу блока 2, второго - к выходу сумматора 4, а выходы - соответственно к входам дополнительного сумматооа
Ј
СЛ
ю со
VI
го
13, один из входов которого связан с выходом блока 5. Выход сумматора 13 является выходом устройства и подключен к управляющему входу электропривода 6..
Устройство работает следующим образом.
Задатчик 1 выдает сигнал, амплитуда которого соответствует среднему ускорению тележки при разгоне, а длительность сигнала равна длительности разгона тележки. Для гашения колебаний груза в конце разгона тележки сигнал на входе электропривода 6, соответствующий заданной скорости, должен изменяться по закону
V / /I р+ 2 I j + g р dt +
+ Ј(-$ + + ) +(а + Ј-о),р,
где I - длина подвеса;
р - угол отклонения подвеса от вертикали;
g - ускорение свободного падения;
0
г- время;
М - масса тележки;
m - масса груза;
k - общий коэффициент передачи;
а - коэффициент передачи цепи обратной связи по углу отклонения подвеса.
Функциональная схема устройства обеспечивает изменение сигнала на выходе сумматора 13 по указанному закону.
Формула изобретения
Устройство для управления электроприводом горизонтального перемещения подвешенного на гибком подвесе груза по авт.св. № 1379238,отличающееся тем, что, с целью повышения точности, оно снабжено дополнительно сумматором, выход которого соединен с управляющим входом
электропривода, и интегрирующим блоком, причем один вход дополнительного сумматора соединен с выходом консервативного блока, а другие входы - с выходом первого сумматора непосредственно и через интегрирующий блок.
| название | год | авторы | номер документа |
|---|---|---|---|
| Задатчик скорости механизма горизонтального перемещения груза на гибком подвесе | 1988 |
|
SU1646981A1 |
| Устройство для управления электроприводом горизонтального перемещения груза на гибком подвесе | 1987 |
|
SU1528719A1 |
| Устройство для управления электроприводом горизонтального перемещения подвешенного на канате груза | 1986 |
|
SU1379238A1 |
| Устройство для управления электродвигателем механизма перемещения груза на гибком подвесе | 1990 |
|
SU1799843A1 |
| Устройство для управления приводом передвижения тележки с гибким подвесом груза | 1989 |
|
SU1684239A1 |
| Устройство для управления приводом перемещения тележки с гибким подвесом грузозахватного органа | 1988 |
|
SU1558851A1 |
| Устройство для управления электроприводом крановой тележки с грузом на гибком подвесе | 1987 |
|
SU1572986A1 |
| Устройство для управления электропроводом механизма горизонтального перемещения груза | 1985 |
|
SU1342866A1 |
| Устройство для управления электроприводом механизма горизонтального перемещения подвешенного на канате груза | 1988 |
|
SU1527134A1 |
| Устройство для управления приводом передвижения крановой тележки с гибкой подвеской груза | 1991 |
|
SU1799844A1 |
Изобретение относится к подьемно- транспортному оборудованию, а именно к устройствам для управления электроприводами горизонтального перемещения груза. Цель изобретения - повышение точности. Задатчик 1 управляющего импульса через консервативный блок 2 и дифференцирующие блоки 7.8 подключен к входу блока 9 перемножения, выход которого соединен с входом сумматора 4. другие входы которого связаны с выходом консервативного блока 2 и выходом блока 12 перемножения, входы которого соединены с выходом дифференцирующего блока 7 и через дифференцирующий блок 11 -сдатчиком 10 длины гибкого подвеса груза, подключенного к входу блока 9 перемножения. Входы сумматора 13. управляющего электроприводом , соединены с консервативным блоком 2 и с выходом сумматора 4 через блок 5 интегрирования и непосредственно. Задатчик 1 при разгоне электропривода 6 выдает сигнал, амплитуда которого соответствует среднему ускорению, а функциональная схема в целом формирует на выходе сумматора 13 сигнал, соответствующий скорости электропривода и обеспечивающий гашение колебаний груза в конце разгона. 1 ил. (А С
| Устройство для управления электроприводом горизонтального перемещения подвешенного на канате груза | 1986 |
|
SU1379238A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
