Изобретение относится к механизации загрузки прессов и может быть использовано для поштучной загрузки заготовок в рабочую зону горячештамповочного пресса.
Цель изобретения - расширение техно- логических возможностей за счет обеспечения загрузки прессов с малым ходом ползуна.
На фиг. I изображен манипулятор, общий вид; на фиг. 2 - то же, вид в плане; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - развертка фигурного паза колонны.
Манипулятор содержит закрепленную на основании, например столе пресса, колонну 1, выполненную вертикальной с замкнутым фигурным пазом 2 (фиг. 4) на боковой поверхности, размещенный внутри колонны вал 3, установленный с возможностью вращения на ползуне пресса н возвратно- поступательного перемещения относительно колонны, подпружиненной пружинами 6 и 7, снабженными толкателями 8 и 9 и захватами 10 на концах. Стрелы 4 и 5 щарнирно установлены на держателе в внде втулки 11 на осях 12. Втулка 11 связана с валом 3 щпонкой 13 и установлена на колонне посредством крыщки 14 и роликов 15.
На колонне 1 установлен копир 16 с копир- ной поверхностью 17.
На валу 3 смонтирован ролик 18, перемещающийся по фигурному пазу 2, имеющему вертикальные 19 и наклонные 20 и 21 участки, причем с целью обеспечения вра- щения вала 3 наклонные участки 20 и 21 смещены относительно вертикальных участков 19 не менее чем на диаметр ролика 18.
Копирная поверхность 17 копира 16 имеет четыре впадины 22, расположенные напротив вертикальных участков фигурного паза ко- лонны.
Устройство работает следующим образом.
При перемещении ползуна пресса вниз ролик 18 вала 3 перемещается по наклон- ному участку 20 фигурного паза 2, вал поворачивается, и посредством щпонки 13 вращает втулку 11 со стрелами 4 и 5 до тех пор, пока ролик 18 не дойдет до нижнего вертикального участка 19 паза 2, который находится против углубления 22 копира 16 (происходит выстой стрел), при этом на позиции II стрелы 3 в захвате проверяется
наличие заготовки, а на позиции IV происходит обдув сжатым воздухом захвата стрелы 5. В то же время на позиции III щтампуется заготовка.
При ходе ползуна пресса вверх ролик 18 выходит из нижнего вертикального участка 19 паза 2 и, попадая в наклонный участок 21, вращает вал 3 и, соответственно, через щпонку 13 вращает втулку II со стрелами 4 н 5 до тех пор, пока ролик 18 не попадет в верхний вертикальный участок 19. При этом происходит выстой стрел, стрела 4 опускается в углубление 22 копира 16 и захват загружается очередной заготовкой, а захват стрелы 5 в это время освобождается от заготовки. В даль- нейщем цикл повторяется.
Изобретение позволяет загружать щтуч- ными заготовками прессы с небольшим ходом ползуна.
Формула изобретения
Манипулятор к прессу, содержащий установленную на основанни вертикальную колонну с замкнутым фигурным пазом, имеющим наклонные и вертикальные участки, установленный внутри колонны с возможностью поворота и вертикального возвратно- поступательного перемещения вал с приводом вертикального перемещения и роликом под фигурный паз, установленный с возможностью поворота держатель, кинематически связанный с валом, кинематическую связь держателя с валом и смонтированные на держателе стрелы с захватными органами на концах, отличающийся тем, что, с целью расширения технологических возможностей за счет обеспечения загрузки прессов с малым ходом ползуна, колонна снабжена торцовым копиром, имеющим впадины, расположенные напротив каждого вертикального участка фигурного паза, каждая стрела установлена на держателе щарнирно с возможностью поворота в вертикальной плоскости, снабжена толкателем, установленным с возможностью взаимодействия с торцовым копиром и подпружинена в направлении последнего, а держатель выполнен в виде охватывающей вал втулки, при этом кинематическая связь держателя с валом выполнена в внде подвижного в вертикальной плоскости шпоночного соединения.
//
Позиция Ж //
L r r 1озицил I
| название | год | авторы | номер документа |
|---|---|---|---|
| Механическая рука | 1981 |
|
SU988438A1 |
| Автооператор | 1983 |
|
SU1144842A2 |
| Устройство для манипулирования заготовками типа труб | 1974 |
|
SU504597A1 |
| Грейферное подающее устройство | 1983 |
|
SU1138213A1 |
| Устройство для перемещения форм | 1971 |
|
SU646902A3 |
| Способ резки тонкостенных труб и устройство для его осуществления | 1985 |
|
SU1382599A1 |
| Подъемно-поворотное устройство для укладки изделий | 1980 |
|
SU963681A1 |
| Манипулятор к ковочным вальцам | 1973 |
|
SU651885A1 |
| Загрузочное устройство | 1978 |
|
SU860994A1 |
| Автооператор | 1982 |
|
SU1060406A1 |


Изобретение относится к области механизации загрузки прессов и может быть использовано для поштучной загрузки заготовок в рабочую зону горячештамловоч- ного пресса. Целью изобретения является расширение технологических возможностей 5 7 ГЗ за счет обеспечения загрузки прессов с малым ходом ползуна. При ходе ползуна пресса вверх связанный с ползуном вал 3 перемещается вверх, ролик 18 вала 3 выходит из нижнего вертикального участка 19 фигурного паза 2 колонны 1 и, попадая на наклонный участок 21, вращает вал 3 и втулку 11 со стрелами 4 и 5 до попадания ролика 18 в верхний вертикальный участок 19. При этом толкатель 8, перемещаясь по поверхности копира 16 и попадая в его углубления, обеспечивает опускание стрел с захватами. Вертикальные участки 19 обеспечивают выстой стрел 4 и 5 с захватными органами. При этом обеспечивается штучная загрузка заготовок в пресс с нанболь- шим .ходом ползуна. 4 ил. 8 г со СХ) о 00 со сригЛ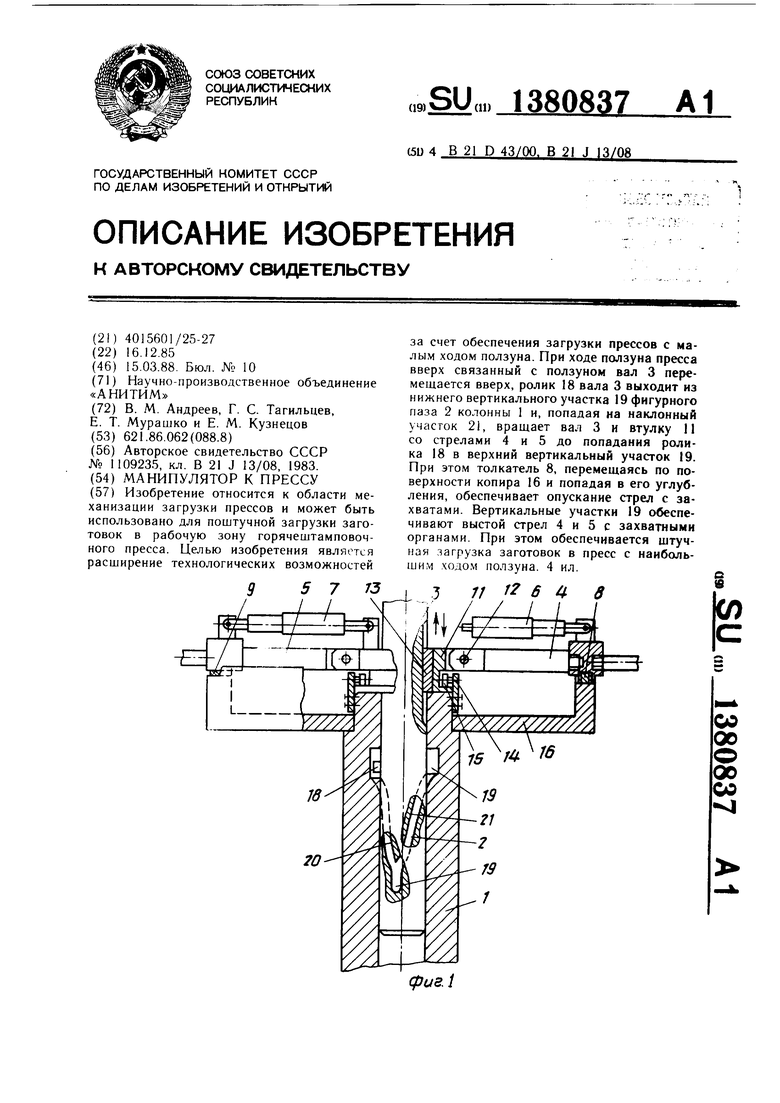
ffu /4 r70 ep/ y/77ff
Фие. 2
cfjtjff.3
7/
19
20
сриг.
| Подъемно-поворотное устройство для укладки изделий | 1983 |
|
SU1109235A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
