1
Изобретение относится к вспомогательному оборудованию кузнечно-прессовых цехов и может быть использовано для механизации загрузки прессов заготовками преимущественно стержневого типа.
Известна механическая рука для-подачи заготовок в штамп пресса, содержащая смонтированный на колонках неподвижйый корпус и поворотную втулку с бойонетным приводом, жестко закрепленную на поворотной втулке стрелу руки с шарнирно-установленным захватом, и привод поворота захвата 1.
Однако известное устройство сложно по конструкции, а также не обеспечивает необходимую ориентацию заготовок при за грузке в штамп в зависимости от хода ползуна пресса, а также переналадку на другую ориентацию заготовок.
Цель изобретений - повышение надежности работы механической руки и увеличение степеней свободы-захвата.
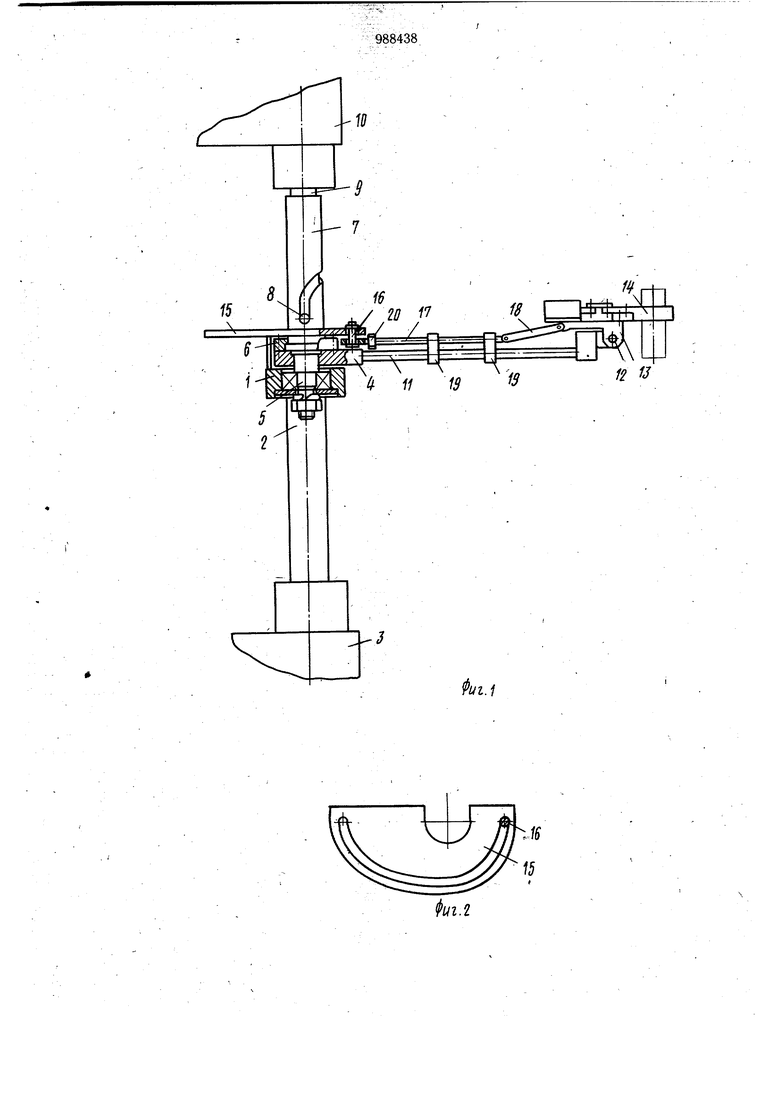
Цель достигается тем, что механическая рука для подачи заготовок в штамп пресса,, содержащая смонтированный на колонка подвижны и корпус и поворотную втулку с бойонетным приводом, жестко закрепленную на поворотной втулке стрелу руки с шарнирно установленным захватом, и привод поворота захвата, снабжена закрепленным на корпусе копиром с фигурным пазом и тягой, установленной на стреле руки с возможностью перемещения вдоль нее, при этом один конец тяги щарнирно связан с захватом, а другой - с копиром посредством закрепленного на ней пальца. На фиг. 1 схематически изображена предлагаемая механическая рука, общий вид; на фиг: 2 - копир руки; на фиг. 3 - положение захвата при его повороте; на фиг. 4 - установка захвата.
Механическая рука состоит из корпуса 1, жестко закрепленного на колонках 2 от15 носительно стола пресса 3. Поворотная плита 4 установлена на оси 5 с возможностью поворота относительно основания. Поворотная плита фланцем 6 жестко связана с поворотной втулкой 7, имеющей фигурлый паз, с которым взаимодействует лец 8 колонны 9, закрепленной на ползуне пресса 10, образуя байонетный механизм поворота. С поворотной плитой 4 жестко соединена стрела 11 руки, на конце которой осью 12 щарнирно закреплено основание 13 захвата. На основании захвата смонтирован захват 14. Механизм поворота захвата состоит из копира 15 с фигурным пазом,жестко закрепленного на корпусе 1, в фигурный паз которого вставлен палец 16, закрепленный на тяге 17, другой конец которой через серьгу 18 шарнирно связан с основанием захвата 13. Тяга 17 поддерживается направляющими 19, крепящимися к стреле И руки. На тяге имеется гайка 20. Механическая рука работает следующим образом. В исходном положении ползун пресса 10 находится в нижнем положении, рука находится на позиции захвата заготовки. При рабочем ходе ползуна Ю вверх колонна 9 с пальцем 8, двигаясь за ползуном, за счет фигурного паза в поворотной втулке 7 заставляет вращаться поворотную плиту 4 со стрелой 11 и захватом 14 относительно корпуса 1. Фигурный паз выполнен таким образом, что в начале хода ползуна стрела руки не поворачивается, что дает время для захвата заготовки, при дальнейщем ходе ползуна вверх рука поворачивается на 180° на позицию загрузки и находится в ней некоторое время для точной укладки заготовки. Для подачи заготовки в щтамп в горизон|гальном положении необходимо повернуть захват 14 на 90° относительно стрелы 11 руки, для чего служит механизм поворота захвата. Одновременно с поворотом плиты 4 палец 16 совёрщает движение по пазу копира 15 и вследствие изменения кривизны паза приводит в движение тягу 17, которая серьгой 18 поворачивает основание 13 захвата 14 вокруг оси 12 на 90° относительно стрелы 11 в вертикальной плоскости (фиг. 3). Для подачи заготовки в штамп в вертикальном положении необходимо отключить механизм поворота. Для этого удаляют палец 16, гайку 20 доворачивают до торца направляющей 19, чем достигается стопорение основания 13 захвата от проворота вокруг оси 12. По сравнению е прототипом предлагаемое устройство обладает высокой надежностью работы и больщим числом степеней свободы захвата. Формула изобретения Механическая рука для подачи заготовок в щтамп пресса, содержащая смонтированный на колонках неподвижный корпус и поворотную втулку с байонетным приводом, жестко закрепленную на поворотной втулке стрелу руки с шарнирно установленным захватом, и привод поворота захвата, отличающаяся тем, что, с целью повышения надежности и увеличения степеней свободы захвата, она снабжена закрепленным на корпусе копиром с фигурным пазом и тягой, установленной на стреле руки с возможностью перемещения вдоль нее, при этом один конец тяги шарнирно связан с захватом, а другой - с копиром посредством закрепленного на ней пальца. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 244282, кл. В 21 D 45/04, 1967 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор для подачи плоских заготовок в обрабатывающую машину | 1988 |
|
SU1539082A1 |
| Манипулятор к прессу | 1985 |
|
SU1380837A1 |
| Устройство В.И.Васильева для штамповки деталей из листового материала | 1986 |
|
SU1388166A1 |
| Устройство для подачи заготовок и удаления изделий из штампа | 1989 |
|
SU1738440A1 |
| Манипулятор к ковочным вальцам | 1973 |
|
SU651885A1 |
| Устройство Кривовязюка для вырубки заготовок из плоского материала | 1980 |
|
SU929284A1 |
| Штамп-автомат для выдавливания полых деталей типа втулок | 1986 |
|
SU1409400A1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Автоматизированный комплекс для многопереходной штамповки | 1986 |
|
SU1349851A1 |
| Установка Кривовязюка для вырубки заготовок из плоского материала | 1981 |
|
SU958083A1 |

11
