О
ее 4;;
Изобретение относится к ма1иин()стр()( - нию, и в частности к роторам и манипуляторам для автоматизации технологических процессов.
Целью изобретения является повышение надежности и упрощение конструкции ii)H цикловом управлении вращением захвати1)го устройства за счет испол1 зования сил инерции.
На фиг. 1 показан захватный орган н одном его крайнем положении, вид сверху; на фиг. 2 - то же, в друг ом крайнем положении.
Устройство состоит из корпуса 1. крепящегося к руке манипулятора, в котором смонтирован вал 2 и на концах этого ва.-ia закреплены захватное устройство 3 и ведомое зубчатое колесо 4, с которым в зацеплении находится зубчатый сектор 5, смонтирпкан- ный с возможностью поворота на оси (, которая закреплена на корпусе 1, и снабженный постоянным ма1Л1итом 7. На нлощад- ке 8 корпуса 1 закреплены регулируем 1е упоры 9 и 10. Центр массы (ИМ) сектора 5 расположен эксцентрично относительно оси 6, при этом нацрав.чение его перемеще 1ия, указанное стрелкой С (фиг. I ) составляете направлением перемещения корпуса 1, указанного стрелкой А, уюл а.
Устройство работает следующим образом. В исходном положении (фиг. 1) зубчаП) сектор 5 с noMonibK) магнига 7 за|{м1К(,-ц- рован на упоре И) и остается на нем EI фале разгона корпуса 1 при перемещении его в направлении стре.лки С.
В фазе торможения корпуса 1 центр массы зубчатого секто|)а 5 под действием сил инерции перемещается относите. 1ьно корпуса но стрелке С.. При этом ве.чичины ма1ни1- ных сил межд .лемепгами 7 и К) ока
зывается не достаточно для удержания зубчатого сектора 5 в исходном положении. Поворот зубчатого сектора 5 продолжается до соприкосновения его хвостовика и магнита 7 с упором 9, при этом сектор 5 поворачивает колесо 4, вал 2 и захватное устройство 3 на заданный угол. Далее корпус I останавливается, а сектор 5 с помощью магнита 7 фиксируется на упоре 9 (фиг. 2). При возвращении корпуса 1 в исходное положение в направлении, противоположном стрелке А, происходит процесс, аналогичный описанному, и захватное устройство 3 возвращается в исходное положение.
15
Формула изобретения
0
5
0
5
Кисть
манипулятора, содержащая корпус, размещенное is нем на валу с возможностью поворота вокруг оси этого вала захватное устройство, и привод, кинематически связанный с этим валом с номощью зубчатой передачи, ведомое зубчатое колесо которой закреплено па валу, отличающаяся 1ем, что, с целью повып1ения надежности и упрощения конструкции при цик.ювом управлении вращением захватного устройства за счет использования сил инерции, привод вы- по;1нен в виде зубчатого сектора, имеющего постоянный магнит, смонтированного с возможностью П()но1)ота на дополнительно внедг нной и жестко связанной с корпусом оси и находящегося в зацеплении с упо- мипутым ведом1,1м зубчаты.м колесом, приче.м центр м;;ссь указанного зубчатого сектора распо.;1ожен эксцентрично относиге.чьно оси его поворота, а корпус снабжен д)умя регулируемыми упорами, размещенными с рюз- можностью взаимодейс ВИЯ с постоянным магнитом сектора.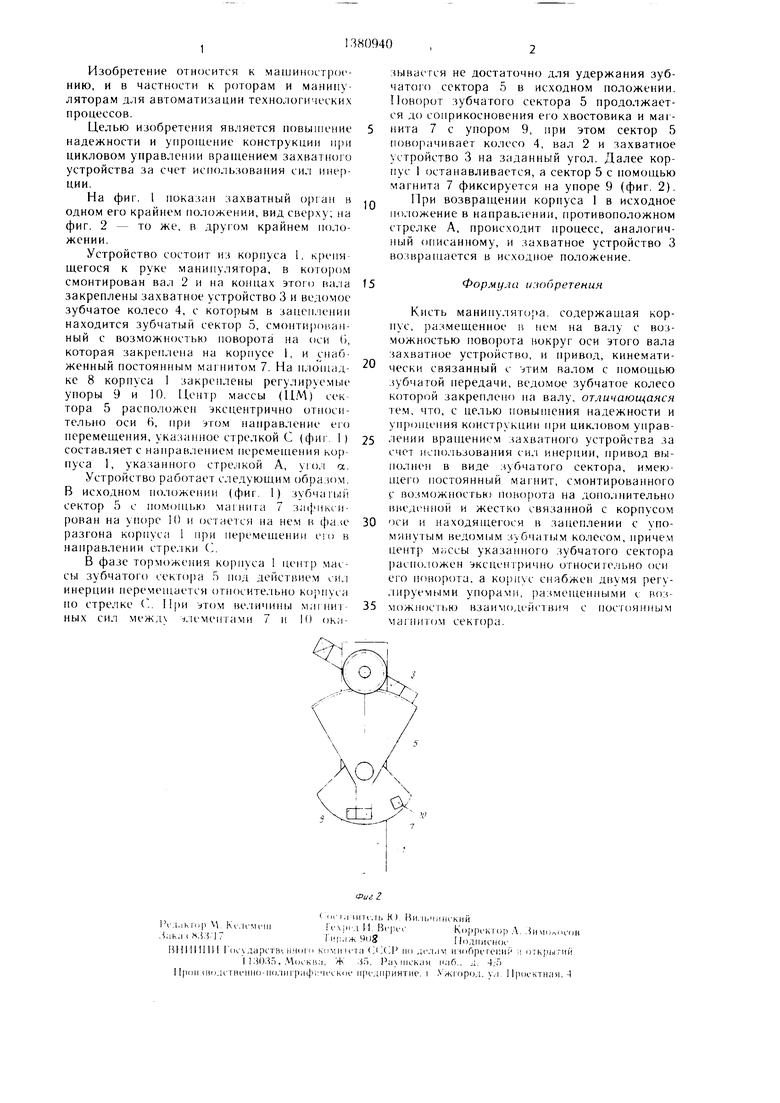
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки изделий | 1989 |
|
SU1668129A1 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2038252C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Захватное устройство манипулятора | 1985 |
|
SU1306711A1 |
| Инерционная муфта | 1976 |
|
SU916804A2 |
| Привод манипулятора | 1985 |
|
SU1293018A1 |
| ДВИЖИТЕЛЬ И СПОСОБ ЕГО ПЕРЕМЕЩЕНИЯ | 2014 |
|
RU2572506C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ РЕКУПЕРАТИВНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2001 |
|
RU2210849C1 |
| Захватное устройство | 1983 |
|
SU1189675A1 |
| ЦЕПНАЯ ПЕРЕДАЧА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА С ИЗМЕНЯЕМЫМ ПЕРЕДАТОЧНЫМ ОТНОШЕНИЕМ, ЗАВИСЯЩИМ ОТ НАГРУЗКИ | 2014 |
|
RU2603292C2 |
Изобретение относится к машиностроению, в частности к роботам и манипуляторам для автоматизации технологических процессов. Целью изобретения является повышение надежности и упрощение конструкции при цикловом управлении врашсн ч Х захватного устройства за счет Hcnivii/i .i .i ния сил инерции. При перемещении ко;): . са 1 в направлении стрелки А п ф ; торможения центр массы зубчатог п гоктсгм под действием сил инерции перемеиыется oi носительно корпуса 1 в направ.К Нии стрел ки С, при этом осуществляется поворс/т зубчатого сектора 5 на оси 6 до соприкосновения его хвостовика с закрепленным н; нем постоянным магнитом 7 с регулируемым упором 9, при этом ЗубчИТЫ) LOKтор 5 поворачивает ведомое зубчатое ко.ю- со 4, вал 2 и захватное устройство 3. 2 и.1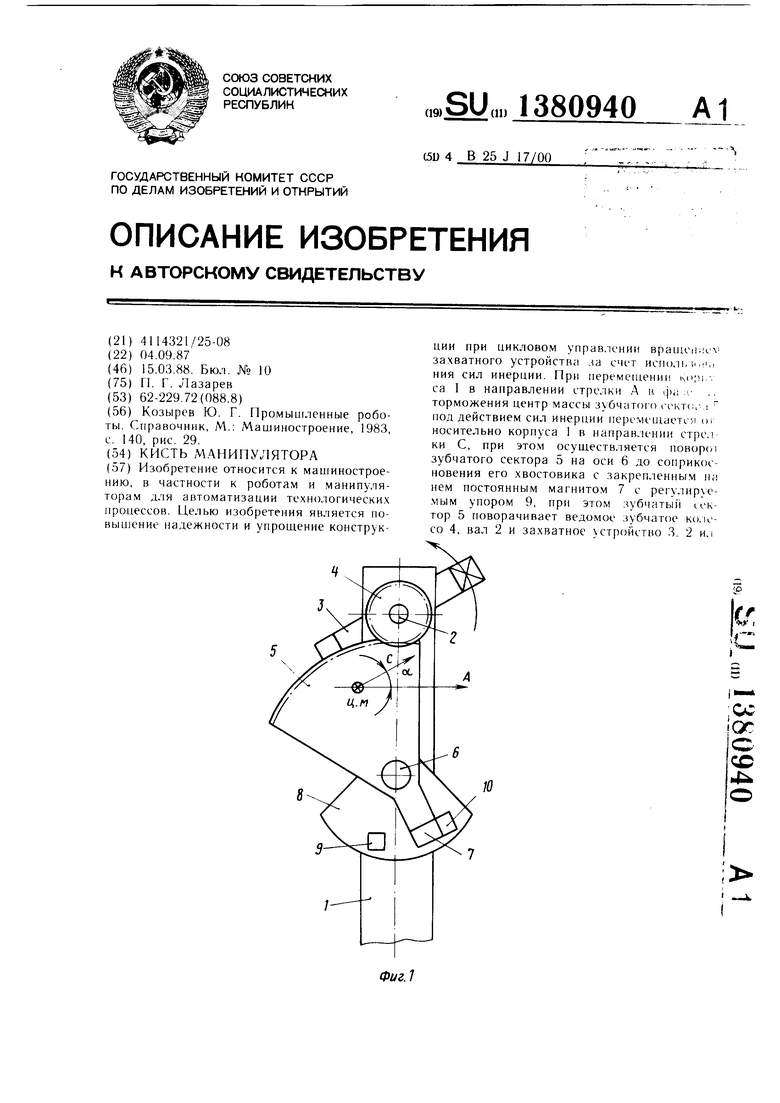
| Козырев Ю | |||
| Г | |||
| Промышленные роботы | |||
| Справочник, М.: Машиностроение, 1983, с | |||
| Способ закалки пил | 1915 |
|
SU140A1 |
| Солесос | 1922 |
|
SU29A1 |
