Изобретение относится к промышленной робототехнике, в частности к средствам захвата и удержания деталей.
Известен захват манипулятора, содержащий силовой цилиндр с двумя штоками, кинематически связанный с рычагами головки захвата, причем штоки силового цилиндра расположены коаксиально с возможностью продольного перемещения друг относительно друга, а внутренний шток шарнирно соединен с рычагами головки захвата, в то время как наружный жестко связан с этой головкой.
Недостаток данной конструкции состоит в низкой надежности, так как в процессе воздействия зажимных элементов, вынесенных манипулятором с погрешностью относительно общей оси, на деталь, также имеющей отклонения от номинальных размеров, возникают перекосы из-за сил зажима, и, как следствие, напряженные состояния в кинематических парах, образованных штоками и поршнями силового цилиндра и заклинивание последних друг относительно друга, что приводит к нарушению работоспособности.
Известно также захватное устройство, содержащее корпус с установленным на нем приводом перемещения захватных губок, состоящим из центрального зубчатого колеса, кинематически связанного с двигателем и входящего в зацепление с зубчатыми колесами, установленными на пальцах с захватными губками, а привод перемещения захватных губок установлен на введенном основании с возможностью его осевого перемещения относительно корпуса захватного устройства и снабжен механизмом освобождения детали на заданной высоте, состоящим из упора, установленного на корпусе с возможностью регулировки его положения относительно корпуса, и предназначенного для взаимодействия с ним пластины, жестко закрепленной на зубчатом колесе, ось которого установлена на основании с возможностью вращения, причем упомянутое зубчатое колесо входит в зацепление с центральным зубчатым колесом привода перемещения захватных губок.
Данная конструкция не может быть применена в тех технологических процессах, у которых не соизмеримы погрешность позиционирования манипулятора и точность захватываемой детали. Это ограничивает технологические возможности захватного устройства.
Целью изобретения является расширение технологических возможностей.
Цель достигается тем, что в устройстве, содержащем корпус, на котором смонтирован привод перемещения зажимных губок, установленных на траверсе, имеющей возможность перемещения относительно корпуса, при этом перемещение траверсы ограничено упором, каждая зажимная губка выполнена в виде эксцентричного диска, шарнирно смонтированного на установленной радиально относительно оси устройства стойке и связанного с траверсой посредством зубчатого колеса, которое смонтировано на диске, а ответная рейка на тяге, смонтированной на траверсе с возможностью перемещения вдоль нее, при этом привод перемещения каждой губки выполнен в виде цилиндра с двумя коаксиально расположенными телескопическими штоками, причем наружный шток жестко связан с траверсой, а внутренний шток со стойкой зажимной губки, посредством дополнительно введенной тяги, установленной в выполненных в корпусе направляющих, при этом в тяге выполнены направляющие, в которых установлена стойка, подпружиненная относительно тяги.
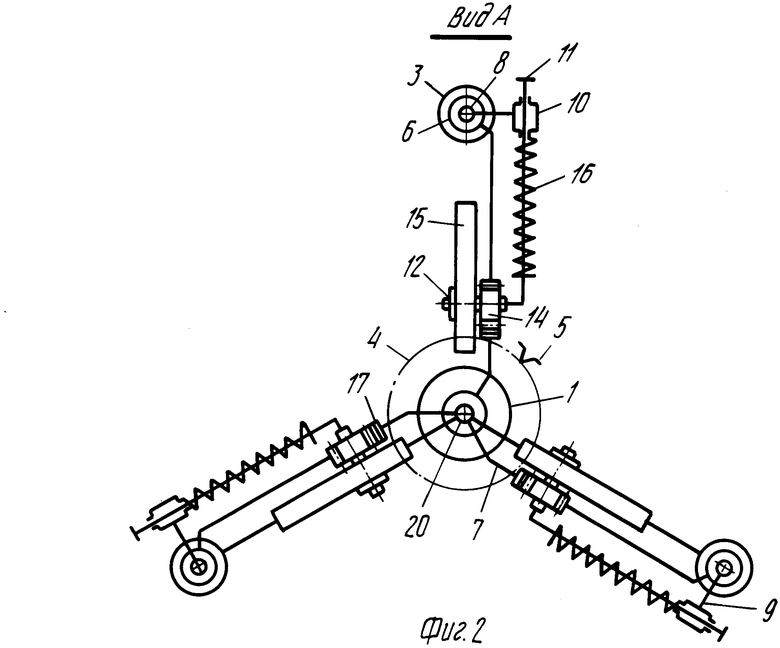
На фиг. 1 показана пневмокинематическая схема захватного устройства; на фиг.2 вид А на фиг.1.
Устройство смонтировано на корпусе 1, посредством которого соединено с рукой манипулятора (не показана). К корпусу 1 присоединены стойки 2 под углом 120о друг к другу. На каждой стойке 2 жестко закреплены цилиндры 3.
Оси цилиндров 3 параллельны оси детали 4, подлежащей захвату и расположенной в приспособлении 5 основного технологического оборудования. Шток-поршни 6 всех цилиндров соединены друг с другом траверсами 7. Шток-поршни 8 каждого цилиндра посредством тяг 9 соединены с опорами 10, в которых размещены стойки 11, несущие валы 12. Причем тяги 9 смонтированы соосно цилиндрам 3 в опорах 13, а последние жестко связаны с корпусами цилиндров 3. На валах 12 установлены зубчатое колесо 14 и цилиндрическая типа диска зажимная губка 15. Ось вала 12 совпадает с осью зубчатого колеса 14 и эксцентрична оси зажимной губки 15, а сам вал 12 подпружинен относительно опоры 10 пружиной сжатия 16. Зубчатое колесо 14 находится в зацеплении с зубчатой рейкой 17, которая кинематически посредством опоры 18 соединена с траверсой 7. Кроме того, опора 18 соединена тягой 19 со стойкой 11 вала 12. На траверсах 7 соосно устройству смонтирован жесткий упор 20.
Захватное устройство работает следующим образом.
Манипулятор выносит устройство соосно детали 4, которая закреплена в приспособлении 5 оборудования таким образом, что зажимные губки 15 оказываются в непосредственной близости от торца детали 4. Затем подается энергия в цилиндры 3. Первоначально в движение приходят шток-поршни 6. Их движением обеспечивается надвиг зажимных губок 15 на деталь 4. Движение шток-поршней 6 всех цилиндров 3 выполняется синхронно, так как они соединены друг с другом траверсами 7. Поступательное перемещение зажимным губкам 15 на деталь 4 обеспечивается жесткой связью ведомого шток-поршня 8 цилиндра 3 с валом 12 через тягу 9, опору 10, стойку 11. Совместно с валом 12 поступательно перемещается и зубчатая рейка 17, зацепленная с зубчатым колесом 14, так как она связана с траверсой 7. Воздействие детали 4 на зажимную губку 15 вызывает ее радиальное перемещение совместно с валом 12 и, следовательно, зубчатым колесом 14 и стойкой 11 относительно опоры 10. При этом деформируется пружина 16. Кинематическая связь между зубчатыми рейкой 17 и колесом 14 не разрывается из-за наличия жесткой тяги 19, связывающей стойку 11 с опорой 18, несущей рейку 17. Деформацией пружины 16 обеспечивается требуемое усилие зажима.
После отработки полной величины рабочего хода шток-поршнем 6 в движение приходит шток-поршень 8 и подается команда на разжим приспособления 5, удерживающего деталь 4. Движением шток-поршня 8, воздействующего через тягу 9, опору 10 на стойку 11, несущую вал 12, обеспечивается линейное перемещение последнего. Рейка 17 при этом остается неподвижной, так как она соединена через опору 18 с траверсой 7, в свою очередь, жестко связанной со шток-поршнем 6, являющимся в данный момент неподвижным. Линейным перемещением на деталь 4 вала 12 относительно неподвижной зубчатой рейки 17 обеспечивается вращение зубчатого колеса 14, а вместе с ним и зажимной губки 15 против часовой стрелки. Вращением же зажимной губки 15 обеспечивается линейное перемещение детали 4 вдоль своей оси на захватное устройство до упора 20. При этом деталь 4 выходит из зоны взаимодействия с приспособлением 5. Эксцентpиситет расположения вала 12 по отношению к центру зажимной губки 15 обеспечивает дальнейший подъем вала 12, стойки 11 в опоре 10, деформацию пружины 16 и увеличение усилия зажима до окончательного. От стойки 11 данный подъем передается через тягу 19 на опору 18, скользящую по траверсе 7, и на зубчатую рейку 17.
После отработки шток-поршнем 8 полной величины рабочего хода движения всех элементов прекращаются. Манипулятор выносит захватное устройство с деталью 4 в заданную координату.
Для разжима детали отработка шток-поршней цилиндров 3 выполняется в обратной последовательности. Движением шток-поршня 8 обеспечивается вращение зажимных губок 15 по часовой стрелке и выдача детали 4 в приемную позицию приспособления 5. При этом вал 12 опускается, что снижает усилие зажима. Движением шток-поршня 6 зажимные губки 15 выводятся из контакта с деталью 4.
Подготовлены условия к автоматическому повторению цикла.
Захватное устройство способно компенсировать погрешности позиционирования и манипулятора, и изготовления детали. Его зажимные губки смещаются относительно общей конструкции, а данное смещение не деформирует кинематические пары из-за возможностей их разгрузки. При этом в приводах не возникает перекосов и напряжений в стыках, что гарантирует их надежное срабатывание.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват | 1980 |
|
SU905061A1 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
| Автооператор | 1982 |
|
SU1057237A1 |
| СХВАТ МАНИПУЛЯТОРА | 2007 |
|
RU2347674C1 |
| Схват | 1987 |
|
SU1440707A2 |
| Захват манипулятора | 1989 |
|
SU1821357A1 |
| Захватное устройство | 1984 |
|
SU1222542A1 |
| Захватное устройство | 1985 |
|
SU1293021A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| МОДУЛЬ РОТАЦИИ | 2000 |
|
RU2176951C1 |
Использование: в системах роботизации производственных процессов. Сущность изобретения: конструкция содержит корпус 1, на котором смонтирован привод 3 перемещения зажимных губок 15, установленных на траверсе 7, имеющей возможность перемещения относительно корпуса 1, при этом перемещение траверсы 7 ограниченно упором 20, смонтированным на корпусе 1. При этом каждая зажимная губка выполнена в виде эксцентричного диска 15, шарнирно смонтированного на установленной радиально относительно оси устройства стойке 11 и связанного с траверсой 7 посредством зубчатого колеса 14, которое смонтировано на диске 15, а ответная рейка 17 на тяге 19, смонтированной на траверсе 7 с возможностью перемещения вдоль нее, при этом привод 3 перемещения каждой губки 15 выполнен в виде цилиндра 3 с двумя коаксиально расположенными телескопическими штоками 6 и 8, причем наружный шток 6 жестко связан с траверсой 7, а внутренний шток 8 со стойкой 11 зажимной губки 15 посредством дополнительно введенной тяги 9, установленной в выполненных в корпусе 1 направляющих 13, при этом в тяге 9 выполнены направляющие 10, в которых установлена стойка 11, подпружиненная относительно тяги 9. 2 ил.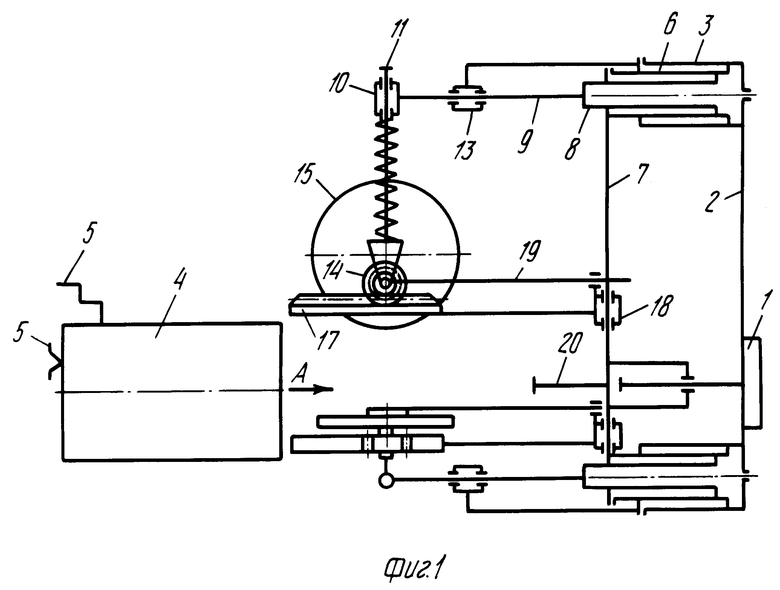
ЗАХВАТНОЕ УСТРОЙСТВО, содержащее корпус, на котором смонтирован привод перемещения зажимных губок, установленных на траверсе, имеющей возможность перемещения относительно корпуса, при этом перемещение траверсы ограничено упором, смонтированным на корпусе, отличающееся тем, что, с целью расширения технологических возможностей, каждая зажимная губка выполнена в виде эксцентричного диска, шарнирно смонтированного на установленной радиально относительно оси устройства стойке и связанного с траверсой посредством зубчатого колеса, которое смонтировано на диске, а ответная рейка на тяге, смонтированной на траверсе с возможностью перемещения вдоль нее, при этом привод перемещения каждой губки выполнен в виде цилиндра с двумя коаксиально расположенными телескопическими штоками, причем наружный шток жестко связан с траверсой, а внутренний шток со стойкой зажимной губки посредством дополнительно введенной тяги, установленной в выполненных в корпусе направляющих, в которых установлена стойка, подпружиненная относительно тяги.
| Захватное устройство | 1987 |
|
SU1465312A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
