можиостью перемещения в стойке 6. Устройство снабжено управляющим механизмом, который имеет фигурный подпружиненный клин 7. Этот клин выполнен зеркально и имеет три зеркальные рабочие поверхности. Клин 7 установлен с возможностью вертикального перемещения в толкателе 2, В пазах толкателя 2 также размещены че- тьфе блокировочных клина 11, подпружиненных пружинами 12 и имеющих контакт со стержнями 13, жестко связанными с планкой 14. Механизм имеет гребенку 15 с штырем 16, контактирующим с фигурным клином 7. Гребенка 15 может поочередно входить в зацепление с шестернями 17 и 19. Шестерни 17 и 19 закреплены на валу 20 барабана 21, На барабане 21 шариир- но закреплен поводок 22, связанный шарнирно с управляющим клином 23 с
внутренней рабочей пружиной 24„ Имеются две направляющие 23, которые установлены в стойке 6 под гребенкой 15 в плоскости, перпендикулярной перемещению гребенки при обкатке шестерен 17 и 18 На ступице шестерни 19 укреплен подпружиненный фрикцион 27,, Имеются рычаги 28 и 29, установленные в стойке 6 под гребенкой 13 и шарнирно связанные с направляющими 25. Автоматизация процесса обслуживания штанговых накатов осуществляется по строгому закону, обусловленному кинематикой управляющего механизма. Это позволяет полностью исключить ручной труд при съеме и установке штанги ил исключить дополнительный механизм, необходимый для подачи штанги в зону захвата рычагов основного манипулятора. 8 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический ключ для свинчивания и развинчивания насосных штанг | 1986 |
|
SU1350325A1 |
| АВТОМАТ ДЛЯ ЗАВЕРТЫВАНИЯ КОНФЕТ «ВПЕРЕКРУТКУ» | 1973 |
|
SU379462A1 |
| Устройство для перегрузки рулонов | 1987 |
|
SU1481169A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Устройство-кривовязюка для отделения листа от стопы и подачи его в рабочую зону пресса | 1980 |
|
SU891197A1 |
| УСТРОЙСТВО ДЛЯ ВЫГРУЗКИ СЛЯБОВ | 1992 |
|
RU2016367C1 |
| Устройство для установки рулонов по оси прокатного стана | 1978 |
|
SU764772A1 |
| Устройство для посадки саженцев | 1990 |
|
SU1748701A1 |
| Устройство для полирования изделий | 1980 |
|
SU867622A1 |
| Устройство для перфорирования бумаги | 1978 |
|
SU859146A1 |

1
Изобретение служит для извлечения штанги из намотанного рулона и установки в гильзу рулона для последующей намотки и найдет применение в целлюлозно-бумажной, полиграфической металлургической, химической и других отраслях промышленности.
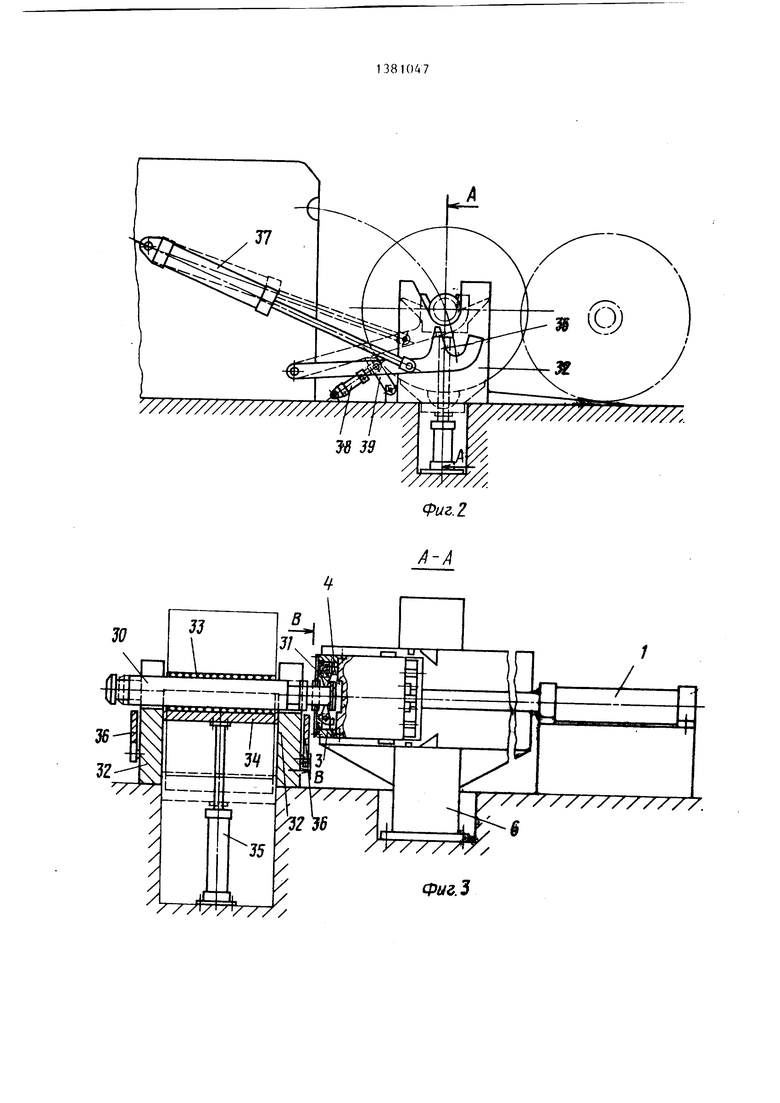
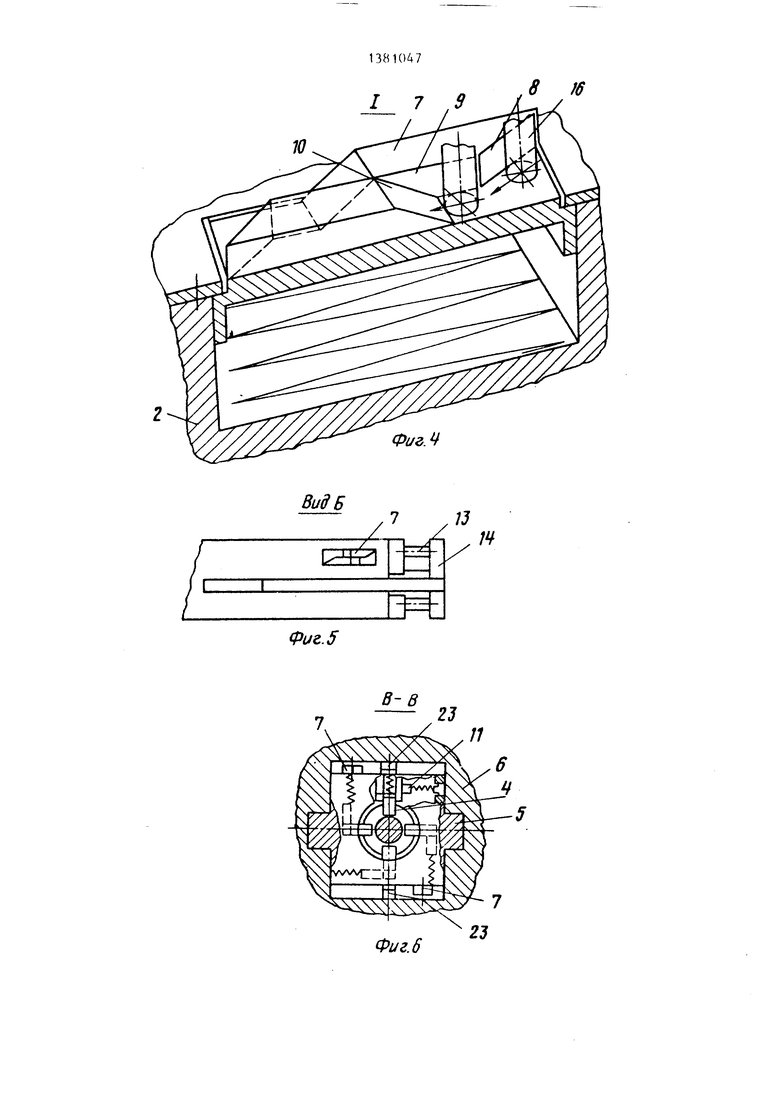
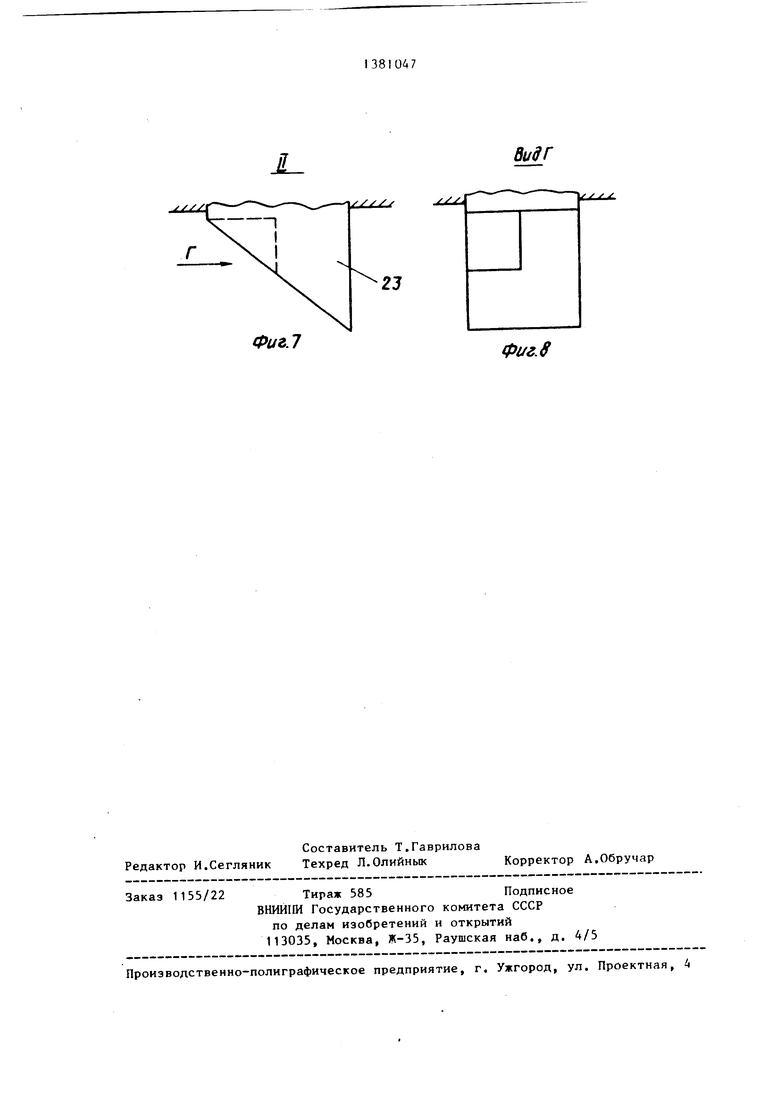
На фиг. 1 изображена кинематическая схема устройства; на фиг. 2 - то же, вид сбоку; на фиг. 3 -разрез А-А на фиг. 2, на фиг. 4 - узел I на фиг. 1; на фиг. 5 - вид Б на фиг. 1, на фиг. 6 - разрез В-В на фиг. 3, на фиг. 7- узел II на фиг. 1; на фиг. 8 - вид Г на фиг. 7.
Устройство содержит привод в виде гидроцилиндра 1 (фиг. 3), толкатель 2, жестко связанный через шток с гидроцилиндром 1, корпус 3 захвата с захватными подпружиненными рычагами 4, жестко укрепленный на толкателе 2, и направляющие злементы 5, выполненные на толкателе 2 по всей его длине и установленные с возмож- костью перемещения в стойке 6.
Устройство содержит управляющий механизм, который имеет фигурный подпружиненный клин 7 (фиг. 4). Этот клин выпол 1ен зеркально и имеет три зеркальные рабочие поверхности 8-10.
Клин 7 установлен с возможностью вертикального перемещения в толкателе 2 . В пазах толкателя 2 также размещены четыре блокировочных клина 11, подпружиненные пружинами 12 и имеющие контакт с четырьмя подпружиненными стержнями 13, жестко связанными с планкой 14.
Механизм имеет гребенку 15 со штырем 16. Через штырь 16 гребенка имеет возможность контакта с фигурным клином 7. Гребенка 15 может поочередно входить в зацеплени е с шестернями 17 и через шестерню 18 с шестерней 19. Шестерни 17 и 19 укреплены на валу 20 барабана 21. На барабане 21 шарнирно закреплен поводок 22. Поводок 22 шарнирно соединен с управляющим клином 23 с внутренней рабочей пружиной 24. Гребенка 15 имеет возможность точного соединения с шестернями 17 и 18 благодаря двум направляющим 25, которые установлены в стойке 6 под гребенкой 15 в плоскости, перпендикулярной перемещению гребенки при обкатке шестерен 17 и 18, и контактируют с уступами 26 гребенки 15. На ступице шестерни 19 укреплен подпружиненный фрикцион
ные
стойке
но связанные
R механизме имеются подпружинен- рычаги 28 и 29, установленные в 6 под гребенкой 15 и шарнир- направляющими 25.
и танга наката 30 имеет проточку 31. Штанга 30 находится в держателях 32, На штангу надета гильза 33, уложенная в желоб 34, связанный с гидроцилиндром 35.
На станке шарнирно укреплены рычаги 36, связанные с гидроцилиндрами станка 37„ Имеются гидроцилиндры 38 и выталкиватель 39, установленные в держателях 32.
Устройство работает следующим образом
Включают гидроцилиндр 1. Его шток
перемещает толкатель
При этом.
фигурный клин 7 плоскостью 8 входит в контакт со штырем 16, /перемещающим гребенку 15 до ее зацепления с шестерне 18 и через нее с шестерней 19 о Одновременно гребенка
15толкает рычаг 28, который воздействует на рычаг 29, а рычаг 29 опускает направляющую 25, выводя ее из зацепления с уступом 26 гребенки 15. Фрикцион 27 предохраняет барабан 21 от случайного проворота в период расцепленного состояния между шестернями 17 и 18 и гребенкой 15. Штырь
16попадает между плоскостью 9 и 10 и фиксирует от расцепления гребенку 15 в момент ее рабочего перемещения. Затем штьфь 16, опираясь о плоскость 10 фигурного клина 7, передвигает гребенку 15 и обкатывает шестерню 18 на четвертую часть окружности барабана 21, переводя его из положения 1 в положение 2. Од- нвоременно поводок 2 отводит наверх управляющий клин 23„ Так как гребенка 15 в конце рабочего перемещения зафиксировалась в конечном положении посредством второй подпружиненной направляющей 25 и вторым уступом 26 гребенки 15, и стенкой стойки 6, то штырь 16 стал неподвижным. Под действием усилия гидроцилиндра 1 толкатель 2 продолжает движение, и фигурный клин 7, плоскостью 10 опираясь
о неподвижный штырь 16 гребенки 15, опускается в полость толкателя 2, и после прохождения фигурного клина 7 через штырь 16 подпружиненный фигурный клин 7 вновь выдвигается на по- в рхность толкателя 2,
5
0
5
При дальнейшем движении толкателя 2 захватные рычаги 4 упираются в торец штанги 30 и поворачиваются вокруг осей. Штанга 30 заходит в тело толкателя 2, и пружина возвращает захватные рычаги 4 в первоначальное положение.
После этого гидроцилиндр 1 пере- JQ мещает шток в обратном направлении, и толкатель 2 с помощью захватных рычагов 4, которые упираются в проточку 31, вытаскивает штангу 30 из рулона. При этом один конец штанги остается в захватных рычагах 4, а второй - в держателе 32 рулона Барабан же переходит из положения 2 и положение 3, гребенка при этом входит в зацепление с шестерней 17. Гильзу 33 укладцывают в желоб 34, который под действием гидроцилиндра 33 поднимается до продольной оси устройства о
После этого гидроцилиндр 1 вкладывает штангу 30 в гильзу 33 для намотки нового рулона. При этом, гребенка 15, перемещаемая фигурным клином 7, толкающим штырь 16, входит в зацепление с шестерней 18, а поводок 22 переходит из попожеиня 3 п положение 4. Управляющий клин,23 перемещается в нижнее рабочее положение
Гидроцилиндр начинает перемещать толкатель 2 в обратном направлении. При этом, планка 14 упирается сначала в перпендикулярную, а затем торец толкателя 2 в наклонную плоскости управляющих клиньев 23, и планка 14 воздействует на стержни 13. Эти стержни 13 передними торцами давят на блокировочные клинья 11 и выводят их из контакта с захватными рычагами 4. После этого захватные рычаги 4, опираясь о проточку 31 неподвижной штанги 30, поворачиваются в положение их полного раскрытия. После чего пружины захватных рычагов 4 возвращают их в первоначальное положение Затем управляюпсий 0 клин 23 отходит наверх, сжимая при этом внутреннюю рабочую пружину 24 под воздействием торца толкателя 2, а планка 14 при этом переместилась в паз внутрь тела на торце тол- 5 кателя 2„
Фигурный клин 7 переводит гребенку в зацепление с шестерней 17 (во всех случаях работа фигурного клина
0
5
0
5
51
7 со штырем 16 гребенки 15, а также работа рычагов 28 и 29 и направляю- ПЦ1Х 25 одинакова и осуществляется как описано) и барабан 21, поворачиваясь, переводит поводок 22 из положения 4 в положение 1 (первоначальное) и одновременно с перемещением поводка 22 из положения 4 в положение 1 внутренняя рабочая пружина 24 управляющего клина 23 возвращается в исходное положение. Стержни 13 под действием своих пружин отводятся назад, и блокировочные клинья 11 под действием пружин 12 входят в контакт с захватными рычагами 4, препятствуя их повороту при вытаскивании штанги„
После этого рычаги 36 под действием гидродилиндров 37 поднимают штангу 30 за ее дапфы и перемешают ее в станок для намотки нового рулона . Намотанный рулон с помощью гидропилиндра 38 и выталкивателя 39 ранее (когда uiTanra 30 бьша вынута из рулона) выкатывают из держателей 32.
По сравнению с известным предложенное устройство исключает необходимость подачи изделия в захватны рычаги и, следовательно, нет неоСз- ходимости в механизмах, обеспечивающих эта подачу, а также исключает возможность заклинивания толкателя при его обратном ходе, как в нагруженном СОСТОЯ1П1И, так и в обычном.
Кроме того, не требуется специального пульта с ЭВМ, программирую76
щей работу устройства, т.е. обеспечивается автоматизация процесса. Имеется возможность использовать
устройство в условиях значительных температурных перепадов окружающей среды, ввиду того, что устройство полностью механическоеj сокращается вспомогательное время на обслуживание станка благодаря отсутствию ручного труда и, следовательно, повышается производительность станка
Формула изобретения
Устройство для обслуживания штанговых накатов, содержащее толкатель, связанный с приводом, корпус захвата с захватными рычагами, закреплеи- П)Й на толкателе, и направляющие
элементы для толкателя, о т л и - ч а н) гг е е с я тем, что, с целью повышения производительности и надежности работы, оно снабжено уп- ра Зляю1Ц11м механизмом, имеющим фигурный подпружиненный клин, установленный с возможностью перемещения в толкателе, гребенку со штырем, контактирующим с фигурным клином, барабан с поводком, кинематически связанньп г с гребенкой, управляющий клин с внутренней рабочей пружиной, шар- нпрно связанный с поводком барабана, две направляющие для гребенки, уста- HOBJieinine под нею в плоскости, перпендикулярной направлению ее рабочего перемещения, и фиксирующие гребенку подпружиненные рычаги, установленные под гребенкой и шарнирно связанные с ее направляющими.
77///7/7//7///////////l///7//
je 39
30
/ /// / /// /
/////////////.
Вид Б
Фиг.. 5
8 Ю
Фиг. Ч
/1 z
Щ
Фиг. 6
JL.
Фиг.7
ВидГ
ixxx/xл//.
25
Фиг.
| Устройство для выпрямления многофазного тока | 1923 |
|
SU50A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
