со оо
05
Изобретение относится к электротехнике, а именно к мектронриводам постоянного тока механизмов, неремещение которых должно производиться с ограничением cKOpocin, ускорения и рывка.
Целью изобретения является повышение быстродействия позиционного электропривода.
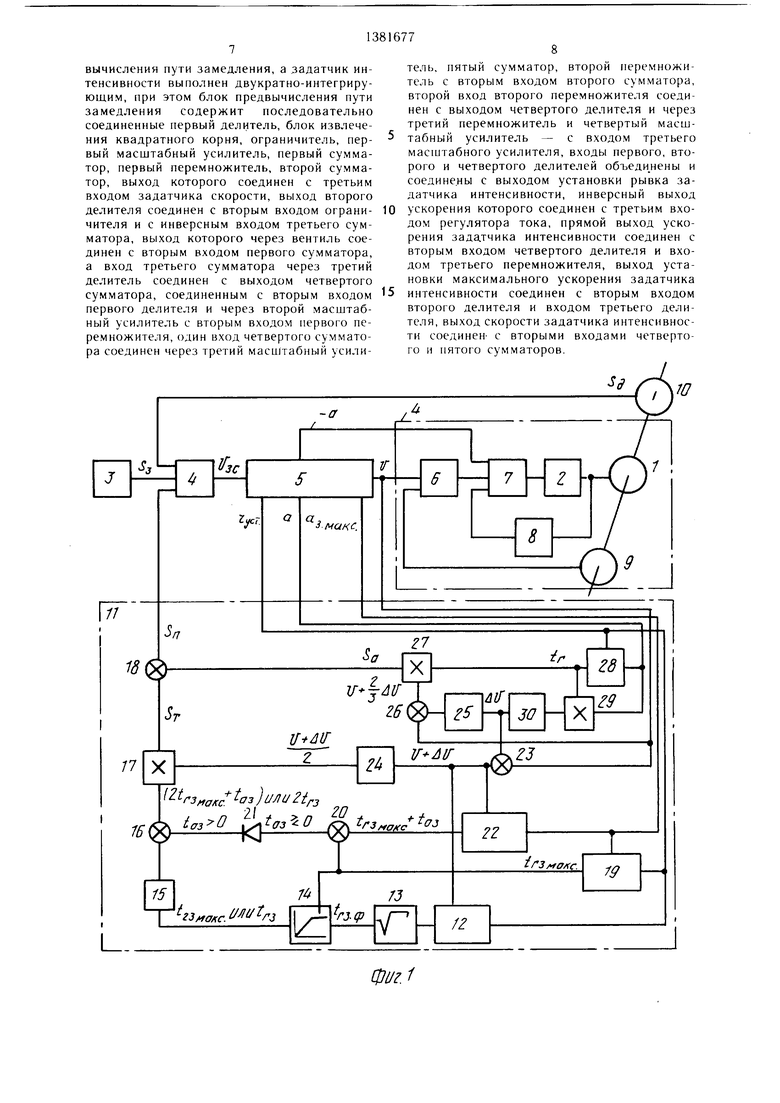
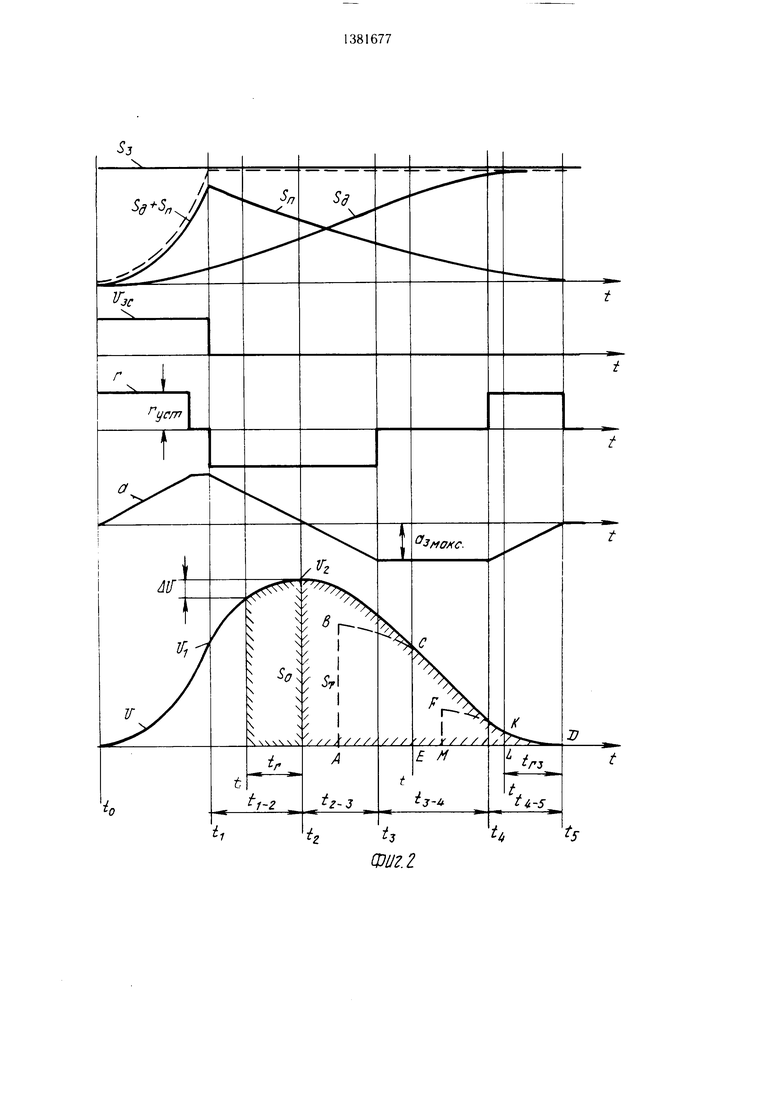
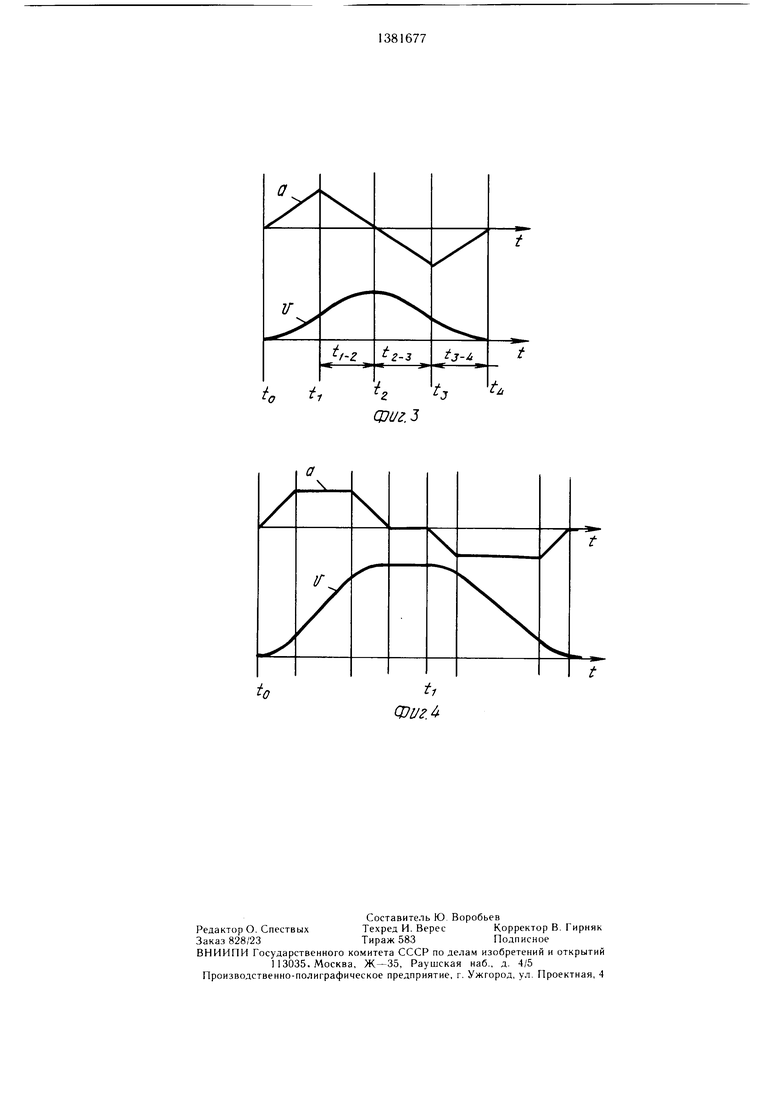
На фиг. 1 приведена схема электропривода; па фиг. 2 4 характер изменения сигналов во в)емя отработки, соответственно средних, малых и больших заданных перемещений.
Позиционный электропривод (фиг. 1) содержит электродвигатель 1 постоянного тока, подключеппый к выходу преобразователя 2, последовательпо соедипенные задатчик 3 положения, задатчик 4 скорости, задатчик 5 интенсивности, регулятор 6 скорости, регулятор 7 тока, выходом соединенный с входом преобразовате. 1Я 2, второй вход регулятора 7 тока соединен с датчиком 8 тока электродвигателя 1, второй вход регулятора 6 скорости соединен с датчиком 9 ск(;рости, второй вход задатчика 4 скорости соеди- нен с датчиком 10 положения, блок 11 пред- вычисления нутп замедления. Задатчик 5 интенсивности выполнен двухкратно-интег- рируюпи1м. Блок 1 1 предвычисления содержит носледовате.1ьпо соединенные первый дс:1итель 12, блок 13 извлечения квадратного корня,ограничитель 14,первый масштабный усилигель 15, пе)вый су.мматор 16, первый иеремпожитель 17, второй сум.ма- тор 18, выход которого соединен с третьим входом задатчика 4 скорости. Выход второго де:1ителя 19 соединен с вторым входом ограничителя 14 и с инверсным входом третьего сумматора 20, выход которого че- )ез венти.чь 21 соединен с вторым входом первого сумматора 16, а вход третьего сумматора 20 через третий делитель 22 соединен с выходом четвертого сумматора 23, соединенным с вторым входом первого делителя 12 и через второй мас1птабный усилитель 24 с гг(рым входом первогч) перемножителя 17.
Один вход четвертого сумматора 23 соединен через третий масштабный усили- те:1ь 25, пятый сумматор 26, второй иере- множитель 27 с вторым входом второго сумматора 18, второй вход второго неремно- жителя 27 соединен с выходом четвертого делителя 28 и через третий перемножитель 29 и четвертый масштабный усилитель 30 соединен с входом третьего масштабного усилителя 25. Входы делителей 12. 19, 28 об ьедппены и соединены с выхо- до.м уставки рывка задатчика интенсивности 5, инверсный выход ускорения которого соединен с гретьи.м входом регулятора 7. Прямой выход ускорения задатчика интенсивности соединен с вторым входом четвертого делителя 28 и входом третьего пере- множите,ля 29. Выход уставки максимального ускорения задатчика интенсивности 5 соединен с вторым входом второго делителя 19 и входом третьего делителя 22. Выход скорости задатчика 5 соединен с вторыми входами четвертого и пятого сумматоров 5 23, 26.
На фиг. 1-4 обозначены также сигналы управления и параметры: S и 5л - соответ- ственпо заданного и действительного пере0 метений, SH, ST, Sn - предвычислитель- ных 11еремеп1.ений, VH - выходной задатчик скорости, V и текущих скорости и ее нрирап1ения, Vi и V2 - значения скорости в фиксированные моменты времени, а и -а - прямой и инверсный текушего уско5 рения, ai,v.iKi - уставки максимального ускорения для периода замедления, г и Гу - рывка и его уставки, to - tn - фиксированные моменты времени, ti-9, .j, 1з-4. t-4-.т - интервалы времени, t, время изменения ускоQ рения от текущего значения до нуля или наоборот, t, - время из.мепеиия ускорения в период замедления от текущего значения до нуля, {г, - интервал времени, в течение которого ускорение изменяется от величины уставки до нуля или наобо5 рот, t.i, -- время, в течение которого замедление производится с ускорением а.мак, - фиктивное время, t -- текущее время. Устройство работает следующим образом. Д:1Я обработки заданного пере.меп1епия без перерегулирования или затяжки во вре0 менп команду на начало замедления нужно подавать в такой точке пути, чтобы опшб- ка по , скорость и ускорение одновременно достигли ну.тевых значений. С этой пелью ожидаем1)1Й путь замедления S- непрерывно иредвычисляется в блоке 11
5 как функция текущих и ожидаемых параметров движения (текущих скорости и ускорения, уставки максимального ускорения в период замедления и уставки рывка) и подается на вход задатчика 4 скорости, ал0 гебраически су.ммируясь с сигналами Si и S.I. Задатчик 4 скорости представляет собой пуль-компаратор с относительно не- больпюй зоной нечувствительности, величина которой определяется разрешающей способностью (т.е. чувствительностью) системы
5 позиционирования. При отсутствии зоны нечувствительности возможно возникновение незатухающих колебаний в окресностп точки равновесия.
При S.S.i-)-S:i на вход задатчика 5 интенсивности посту 1ает сигнал V u и электродвигатель 1 разгоняется в зависимости от знака сигнала ,с «вперед или «назад или вращается с установивщейся (максимальной) скоростью. Когда вследствие увеличения сигналов 5д и Sn (либо только S,)
е установится равенство 5. 5д-|--5м, сигнал Vi обратится в нуль и начнется замедление, в процессе которого приведенпое равенство поддерживается.
0
Скорость, ускорение и рывок приводимого механизма 11рограммирук)тся задатчи- ком 5 интенсивности, выполненном по одной из известных схем, причем на вход регулятора 7 тока дополнительно подается сигнал - а текупнм о заданного ускорения, величина которого выбирается из ус.мовия компенсации динамической составляющей тока (а значит и момента) (лектродвига- теля 1. В этих ус;1овиях задаваемые задат- чиком 5 интенсивности ускорение и скорость отрабатываются практически без искажений и запаздываний, а регулятор ( скорости лип1Ь компенсирует статическую составляю- П1ую тока (а значит и статический момент). Поэтому можно полаг ать, что задаваемые и действительные скорость и ускорение нрак- тически совпадают. Следовательно, для пред- вычисления пути замедления можно использовать вырабатываемые задатчиком о интенсивности сигналы скорости, ускорения и рывка. KoTOpi.ie к отличие oi действительных парамет ов движения не соде)- жат номех и поэтому яв. 1яются 11|)ед1и)чти- тельными. Ф())1ир()ваиие этих сигиалои ti задатчике 5 интенсивности 11))ди 1ся таким c)6pa3(jM, что cnrHa.iiii а - . г. ) в процессе от)аоотки заданного перемещения поступают в 6;iuK I I непрерывно, а н знаки всегда совпадают с напраЕ /К Иием псрсме- нц ния (вперел, «, назад « ). , 5иак сигнала а, также и1)ступан)1цего и блок 11, зависит как от нанраиления пе)е 1е цения. гак и от )ежима рабопЧ) |разгон и.ш ам,-ч- ление) и ха 1акте)изу1 гся таб.
внередназад
разг он замед.лепие 1;)мед, 1еиие +-I
В зависимости ол ве.шчин) ла;ип 1101Ч) перемещения при его ()трабо|ке млммижнь три вариан1а 1е))| ) нрошчч л: 1()И .малых заданиях не у иеиают , . ia- НОВИВН1ИХСЯ (|.е. максима,льиьгх) шмичии CKopocTii и ускорение, при сре.щих за.таниях пе успевает досличь установпвпкмк-я р,е. и- чины только скорость, нри 6o,ibniiix з;1.1аииях скорость также достигаег устанонивш к я величины. НаибОоК е общим является с.лу- чай отработки средне) задания. Поэтому применительно к нему и рассмотрим процесс предвычис.ления пути замед, 1ения S б.ю- ком 11.
В момент времени to (фиг. 2) бы,10 ;а- дано неремешецие Si, в резу,:|ьтате чего механизм пача,:1 разг оняться, например, «вперед. В процессе разгона в момент времени ti вследствие всззрастания сигналов S.i и Si установилось равенство .-t--Sii. Поэтому сигнал V- обратился в нуль и началось замедление. При этом нуть для текущего времени численно равен сумме оконтуренн1)1х штриховыми линиями пло- гцадей S и Si. Площадь (т.е. путь) S;. составляет
(V44 AV)t,,
,
.,, air Л -Y
При S. л; t, t, ti a ai .V AVi V2- V l, поэтому
S.4(V| + |-AV,)t, ,.
Время t, вычисляется (фиг. 1) блоком 28 деления, приращение AV скорости - пе- рем}1ожителем 29 и масштабным усилителем
30, cv.MMa V + 4AV масщтабпым усили- J
15 телем 25 и сумматором 26, а произведение
2 i
10
(V- AV )- ir -- перемножителем 27.
П.ющадь (т.е. путь) Si (фи 2) состав,1яет
20
S. fvdt . + (2l..v:,K..O,(2)
W
где.. ..„., L± t,..:, t, ,;
25
t,.M,,h, t:n) - {,,-.,.:,, X
V + AV
П) S) S4; V-(, V..
|.-.--ti ,, поэтому S. I -(tj ;i+l, ,, + t., s).
PaiiOHCTBo V + в процессе замедления 1-об,:1юдается на интервалах ti 2 и Ij л, т.чк как изменение скорости V компенсируется равпым по величине и противо- 11ч.1о/ь:ным ПС. знаку изменением приращения . . Очевидно, на этих интервалах соб- ,1К)дае1ся и равенство tj.,i-4. С.1едовате, 1Ь- но, и процессе замедления при S -S: I eoiist. Сумма V -|-AV вычисляется
V4AV
(фиг. 1) сумматором 23, полусумма
ап -f
маспиабпым усилителем 24, время 1, 41. б.локом деления 22, время 1,.м.;., б, 1оком Д1 ления 1Г1, время 1.ссчммато)ом L O. 11оскол1 к при отработке средних перемещений в момент времени ti всегда I..;.;(), то соответствующий ему сигнал нро- ходит через вентиль 21 на вход сумма гора Hi. Сигпа,ч, соответствующий ,,-.,., поступает также па ограничивающий вход ограничителя 14. Па основной вход этого ограничителя поступает сигнал, соответствующий
фиктивпому времени
- j
рый вычисляется б.юком 12 де,1ения и 13 извлечения квадратного корня. Так как при отработке средних перемещений в момепт
времени ti всегда tri. мак., то сигнал на выходе ограничителя 14 соответствует .. Его удвоенная ве.чичина вычисляется мас- 1итабным усилителем 15, суммарное время 2t, м;,к. -j-t,M - сумматором 16, а произведение
+ ь
иеремножителем 17,
сумма S i-HSi вычисляется сумматором 18. В процессе замедления (т.е. при ) предвычис.:1яемый путь S непрерывно уменьшается, оставаясь в . момент времени равным участку заданного перемещения, который ен1.е необходимо отработать (т.е. численно равен площади, ограниченной слева ординатой текущего времени и сверху - кривой скорости). Действительно на интервале ti -2 путь S;i по мере уменьшения ускорения а. и соответственно вре.мени tr согласно (1) также уменынается и обра- п;аеся в нуль при ti ti, а путь Si, как было показано, сох)аняется постоянным. На интервале {. :i вс.ледствие изменения знака ускорения а путь Sa становится отрицательным и численно равным площади, ограниченной слева ординатой t:., справа ординатой текущего времени и сверху кривой скорости. Il) :JT()My он вычитается в сумматоре 18 из пути Si, который по-прежнему сохраняется посгоянным. На интервале t:, ,)-. и поэтому приращение ЛУ сохраняется постоянным и максимальным. Поэтому оно уже не компенсирует уменьшение текуще скорости V . Кроме того, умень- шаетс Я ti- t.i t. Поэтому путь S также уменьшается. Например, д,тя текуптего времени t он чис.1спп{ равен п.тощади ABC.D. Но так как из него вычитается путь Sa, числепно рав}1ЫЙ площади ЛВ(, то результирующий путь Si по-прежнему численпо равен пло- 1пади, ограпиченпой слева орди)татой теку- Ttero в)емени. На интервале 14-.s нуть Si чис-ленно равен пло1Т1ади 1-KDM, из которого вычитается путь S.i, численно равный нло- щади ЬЖЬ.А. Поэтому путь Si по-прежнему остается численно )авпым площади, ограни- четпюй с.лева ординатой текуш.его времени. На этом инте)вале ускорение а уменыпает- ся по линейному, а скорость V но параболическому законам и обращаются в нуль в момент времени t-,. Поэтому для текущего времени ,3 они составляют
.lt,,; V
г-аь
(3)
Но они могут быть определены и по структурной схеме блока 11
tr-:
откуда
,. it,;
(3) и
.,, at,
(Сравнивая выражения (3) и (4), получим:
|t,,,t и .(5)
На этом интервале сигна.л на выходе сумматора 20 становится отрицательным и не проходит через вентиль 21, т.е. получаем
1аз 0. Следовательно, согласно (2) получим
V+AV,
.3(V + AV)t,3.
При этом выражение для вычисления времени t,3 блоками 12, 13 по,пучаем из выражения- (3) с учетом равенства (5)
10
t,3
5
0
5
0
5
0
5
0
5
Так как ,, то сигнал с выхода блока 13 проходит через ограничитель 14 без искажений, т.е. .
При отработке малых перемещений (фиг. 3) равенство .a-|-Sn устанавливается в момент времени ti также в результате возрастания сигналов Sa и SM. При этом вычисление пути Sa производится так же, как и при отработке средних нереме- 1цений.
Поскольку при малых перемещениях t. 0, то вычисление пути Si производится так же, как и при средних неремещениях на интервале t4--5 (фиг. 2), причем на интервалах ti-2 и t2-:i (фиг. 3) ST const. На интервале пути Sa и Si суммируются, на интервалах и 1з 4 путь Sa вычитается из пути Si.
При отработке больших переме1Г1ений (фиг. 4) во время движения с установив- лейся скоростью а () и соответственно и S.. Следовательно, Srf Si const. Поэтому равенство .i-t--Sii устанавливается в момент времени ti только вследствие увеличения сигнала S... Дальнейший процесс предвычисления пути Sn производится так же, как и при средних перемещениях.
Таким образом, э.лектропривод отрабатывает любую величипу заданного перемещения за минимально возможное время при соблюдении наложенных ограничений на скорость, ускорение и рывок, т.е. реализует управление оптимальное по быстродействию и динамичности.
Формула изобретения
Позиционный электропривод, содержа- П1ИЙ электродвигатель постояного тока, подключенный к выходу преобразователя, последовательно соединенные задатчик положения, задатчик скорости, задатчик интенсивности, регулятор скорости, регулятор тока, выходом соединенный с входом преобразователя, второй вход регулятора тока соединен с датчиком тока электродвигателя, второй вход регулятора скорости соединен с датчиком скорости, второй вход задатчика скорости соединен с датчиком положения, отличающийся тем, что, с целью реализации оптимального по быстродействию и динамичности закона отработки заданных перемещений, в него введен блок предвычисления пути замедления, а задатчик интенсивности выполнен двукратно-интегрирующим, при этом блок предвычисления пути замедления содержит последовательно соединенные первый делитель, блок извлечения квадратного корня, ограничитель, первый масштабный усилитель, первый сумматор, первый перемножитель, второй сумматор, выход которого соединен с третьим входом задатчика скорости, выход второго делителя соединен с вторым входом ограничителя и с инверсным входом третьего сумматора, выход которого через вентиль соединен с вторым входом первого сумматора, а вход третьего сумматора через третий делитель соединен с выходом четвертого сумматора, соединенным с вторым входом первого делителя и через второй масштабный усилитель с вторым входом первого перемножителя, один входт, четвертого сумматора соединен через третий масштабный усилитель, пятый сумматор, второй перемножитель с вторым входом второго сумматора, второй вход второго перемножителя соединен с выходом четвертого делителя и через третий перемножитель и четвертый масш- 5 табный усилитель - с входом третьего масштабного усилителя, входы первого, второго и четвертого делителей объединены и соединены с выходом установки рывка задатчика интенсивности, инверсный выход
0 ускорения которого соединен с третьим входом регулятора тока, прямой выход ускорения задатчика интенсивности соединен с вторым входом четвертого делителя и входом третьего перемножителя, выход установки максимального ускорения задатчика
интенсивности соединен с вторым входом второго делителя и входом третьего делителя, выход скорости задатчика интенсивности соединен- с вторыми входами четвертого и пятого сумматоров.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1989 |
|
SU1697236A1 |
| Устройство для точного останова электропривода | 1985 |
|
SU1272447A1 |
| Устройство для задания скорости электропривода | 1982 |
|
SU1026266A1 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| Моментный электродвигатель постоянного тока с ограниченным углом поворота | 1990 |
|
SU1757038A1 |
| ВЫСОКОДИНАМИЧНЫЙ БЕЗДАТЧИКОВЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ МОМЕНТОМ | 2012 |
|
RU2498497C1 |
| Устройство для контроля продольной жесткости образцов текстильного материала | 1987 |
|
SU1631349A1 |
| Устройство для управления подъемной машиной | 1985 |
|
SU1331784A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Позиционный электропривод постоянного тока | 1984 |
|
SU1246313A1 |
Изобретение относится к э.пектро- технике и м.б. применено в электроприводах шахтных подъемных установок, скоростных лифтов, маятниковых канатных дорог. П,ель изобретения - реализация оптимального по быстродействию и динамичностн отработки заданны.х перемещений. Устройство содержит в нрямом канале последовательно соединенные задатчик положения, задатчик скорости, двухкратноинтег- рируюп1ий задатчик интенсивности и систему авторегулирования скорости, а в канале обратной связи - датчик положения, датчик скорости и датчик тока. За счет введения блока нредвычисления пути замедления иро- пзводится автоматический выбор точки на- ча.1а замедления путем непрерывного вычисления в процессе движения ожидаемого пути замедления. Заданное неремен1ение вынолпяется с ограничением скорос ти, ускорения и рывка по оптимальной траектории дЕШжения. 4 ил. i (О
S
//
S.
п
)
гз
txi J J
Г гзмакс.
|.
29
фи.1
Z
Фиг.З
ч.
tj
Ф1/гА
| Позиционный электропривод постоянного тока | 1981 |
|
SU1072223A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Позиционный электропривод постоянного тока | 1984 |
|
SU1246313A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
