(21)4603386/27-11
(22)09.11.88.
(46) 23.09.90. Бюл. № 35
(71)Проектно-конструкторский институт конвейеростроения
(72)В.М. Машуков (53) 621.869(088.8)
(56) Авторское свидетельство СССР № 1041434, кл. В 65 G 1/00, 1980. Авторское свидетельство СССР № 1081081, кл. В 65 G 1/06, В 66 F 9/14, 1983.
(54) ГРУЗОЗАХВАТ СТЕЛЛАЖНОГО КРАНА.-ШТАБЕЛ ЕРА
(57) Изобретение относится к юдъемно- транспортному машиностроению, в частности к грузозахватам стеллажных кранов- штабелеров. Цель изобретения - повышение точности позиционирования. На раме 1 грузозахвата установлена в горизонтальном положении поворотная консоль 5 с жестко закрепленным зубчатым контуром 7 и направляющей канавкой 22, расположенной эквидистантно его делитатьной поверхности, а средство обкатывания выполнено в виде бесконечной цепи 18, огибающей установленную на консоли пару звездочек 10 и 1 1 с возможностью вращения в горизонтальной плоскости. 9 ил.
и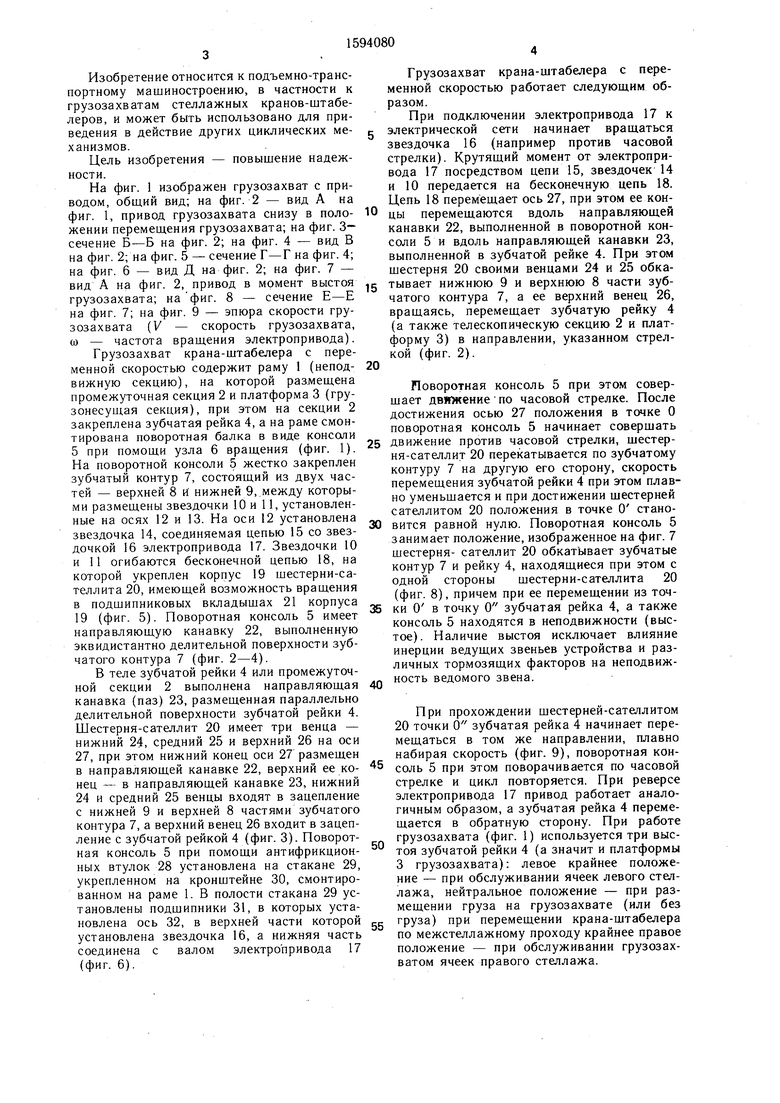
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоподъемная площадка крана-штабе-лЕРА | 1979 |
|
SU844519A1 |
| Захват к крану-штабелеру | 1980 |
|
SU992418A1 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1981 |
|
SU1024393A1 |
| Грузозахватное устройство стеллажного крана-штабелера | 1990 |
|
SU1773813A1 |
| Грузоподъемная площадка крана-штабелера | 1982 |
|
SU1119946A1 |
| Привод грузозахвата крана-штабелера с переменной скоростью | 1980 |
|
SU1041434A1 |
| Грузозахват телескопический | 1980 |
|
SU895914A1 |
| Перегрузочное устройство для штучных грузов | 1973 |
|
SU500134A1 |
| Транспортно-накопительная система | 1988 |
|
SU1682255A1 |
| Грузоподъемник крана-штабелера | 1990 |
|
SU1733347A1 |

Изобретение относится к подъемно-транспортному машиностроению, в частности к грузозахватам стеллажных кранов-штабелеров. Цель изобретения - повышение точности позиционирования. На раме 1 грузозахвата установлена в горизонтальном положении поворотная консоль 5 с жестко закрепленным зубчатым контуром 7 и направляющей канавкой 22, расположенной эквидистантно его делительной поверхности, а средство обкатывания выполнено в виде бесконечной цепи 18, огибающей установленную на консоли пару звездочек 10 и 11 с возможностью вращения в горизонтальной плоскости. 9 ил.
Фиг. 2
сл
СП
со о
00
Изобретение относится к подъемно-транспортному машиностроению, в частности к грузозахватам стеллажных кранов-штабе- леров, и может быть использовано для приведения в действие других циклических механизмов.
Цель изобретения - повышение надежности.
На фиг. 1 изображен грузозахват с приводом, обший вид; на фиг. 2 - вид А на фиг. 1, привод грузозахвата снизу в положении перемещения грузозахвата; на фиг. 3- сечение Б-Б на фиг. 2; на фиг. 4 - вид В на фиг. 2; на фиг. 5 - сечение Г-Г на фиг. 4; на фиг. 6 - вид Д на фиг. 2; на фиг. 7 - вид А на фиг. 2, привод в момент выстоя грузозахвата; на фиг. 8 - сечение Е-Е на фиг. 7; на фиг. 9 -- эпюра скорости грузозахвата (V - скорость грузозахвата, (I) - частота вращения электропривода). Грузозахват крана-штабелера с переменной скоростью содержит раму 1 (неподвижную секцию), на которой размещена промежуточная секция 2 и платформа 3 (гру- зонесущая секция), при этом на секции 2 закреплена зубчатая рейка 4, а на раме смонтирована поворотная балка в виде конссши 5 при помощи узла 6 вращения (фиг. 1). На поворотной консоли 5 жестко закреплен зубчатый контур 7, состоящий из двух частей - верхней 8 и нижней 9, между которыми размещены звездочки 10 и 11, установленные на осях 12 и 13. На оси 12 установлена звездочка 14, соединяемая цепью 15 со звездочкой 16 электропривода 17. Звездочки 10 и 11 огибаются бесконечной цепью 18, на которой укреплен корпус 19 шестерни-сателлита 20, имеющей возможность вращения в подшипниковых вкладышах 21 корпуса 19 (фиг. 5). Поворотная консоль 5 имеет направляющую канавку 22, выполненную эквидистантно делительной поверхности зубчатого контура 7 (фиг. 2-4).
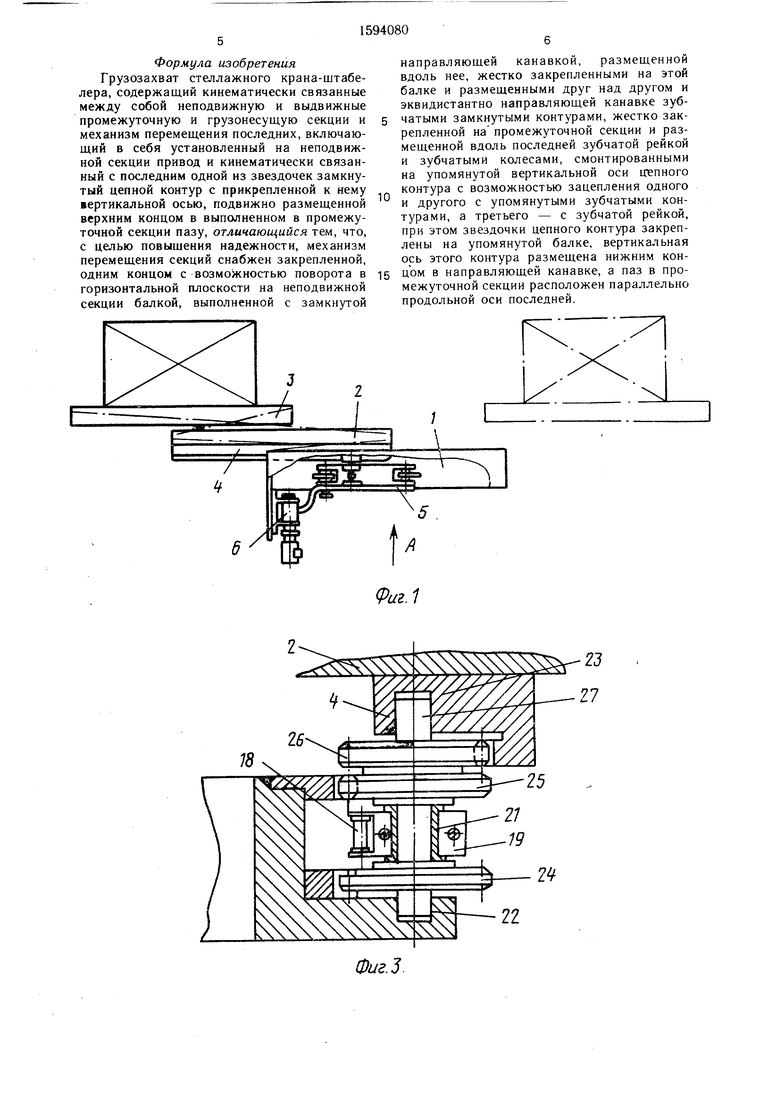
В теле зубчатой рейки 4 или промежуточной секции 2 выполнена направляющая канавка (паз) 23, размещенная параллельно делительной поверхности зубчатой рейки 4. Шестерня-сателлит 20 имеет три венца - нижний 24, средний 25 и верхний 26 на оси 27, при этом нижний конец оси 27 размещен в направляющей канавке 22, верхний ее конец - в направляющей канавке 23, нижний 24 и средний 25 венцы входят в зацепление с нижней 9 и верхней 8 частями зубчатого контура 7, а верхний венец 26 входит в зацепление с зубчатой рейкой 4 (фиг. 3). Поворотная консоль 5 при помощи антифрикционных втулок 28 установлена на стакане 29, укрепленном на кронштейне 30, смонтированном на раме 1. В полости стакана 29 установлены подшипники 31, в которых установлена ось 32, в верхней части которой установлена звездочка 16, а нижняя часть соединена с валом электропривода 17 (фиг. 6).
Грузозахват крана-щтабелера с переменной скоростью работает следующим образом.
При подключении электропривода 17 к
электрической сети начинает вращаться звездочка 16 (например против часовой стрелки). Крутящий момент от электропривода 17 посредством цепи 15, звездочек 14 и 10 передается на бесконечную цепь 18. Цепь 18 перемещает ось 27, при этом ее концы перемещаются вдоль направляющей канавки 22, выполненной в поворотной консоли 5 и вдоль направляющей канавки 23, выполненной в зубчатой рейке 4. При этом шестерня 20 своими венцами 24 и 25 обкатывает нижнюю 9 и верхнюю 8 части зубчатого контура 7, а ее верхний венец 26, вращаясь, перемещает зубчатую рейку 4 (а также телескопическую секцию 2 и платформу 3) в направлении, указанном стрелкой (фиг. 2).
Поворотная консоль 5 при этом совершает движение по часовой стрелке. После достижения осью 27 положения в точке О поворотная консоль 5 начинает совершать
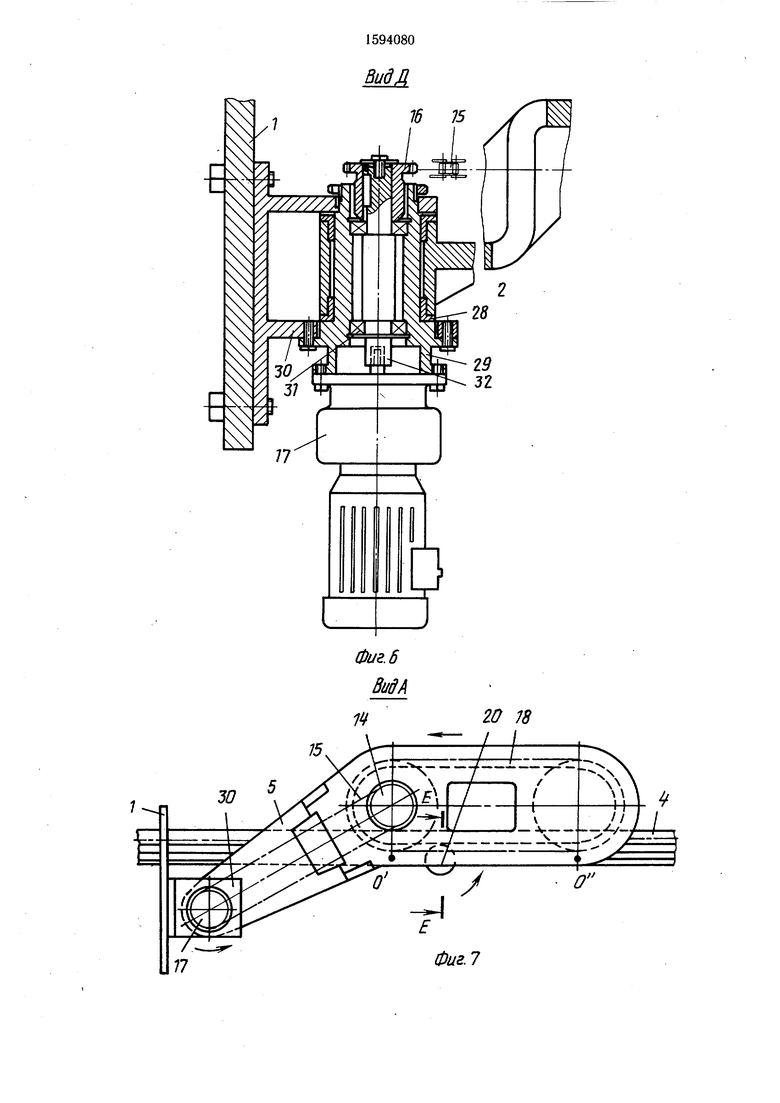
движение против часовой стрелки, щестер- ня-сателлит 20 перекатывается по зубчатому контуру 7 на другую его сторону, скорость перемещения зубчатой рейки 4 при этом плавно уменьшается и при достижении шестерней сателлитом 20 положения в точке О становится равной нулю. Поворотная консоль 5 занимает положение, изображенное на фиг. 7 шестерня- сателлит 20 обкатывает зубчатые контур 7 и рейку 4, находящиеся при этом с одной стороны шестерни-сателлита 20 (фиг. 8), причем при ее перемещении из точки О в точку О зубчатая рейка 4, а также консоль 5 находятся в неподвижности (выс- тое). Наличие выстоя исключает влияние инерции ведущих звеньев устройства и различных тормозящих факторов на неподвиж
ность ведомого звена.
При прохождении шестерней-сателлитом 20 точки О зубчатая рейка 4 начинает перемещаться в том же направлении, плавно набирая скорость (фиг. 9), поворотная кон5 соль 5 при этом поворачивается по часовой стрелке и цикл повторяется. При реверсе электропривода 17 привод работает аналогичным образом, а зубчатая рейка 4 перемещается в обратную сторону. При работе грузозахвата (фиг. 1) используется три выс тоя зубчатой рейки 4 (а значит и платформы 3 грузозахвата): левое крайнее положение - при обслуживании ячеек левого стеллажа, нейтральное положение - при размещении груза на грузозахвате (или без груза) при перемещении крана-щтабелера по межстеллажному проходу крайнее правое положение - при обслуживании грузозах- ватом ячеек правого стеллажа.
Формула изобретения Грузозахват стеллажного крана-штабе- лера, содержащий кинематически связанные между собой неподвижную и выдвижные промежуточную и грузонесущую секции и механизм перемещения последних, включающий в себя установленный на неподвижной секции привод и кинематически связанный с последним одной из звездочек замкнутый цепной контур с прикрепленной к нему вертикальной осью, подвижно размещенной верхним концом в выполненном в промежуточной секции пазу, отличающийся тем, что, с целью повышения надежности, механизм перемещения секций снабжен закрепленной, одним концом с возможностью поворота в горизонтальной плоскости на неподвижной секции балкой, выполненной с замкнутой
направляющей канавкой, размещенной вдоль нее, жестко закрепленными на этой балке и размещенными друг над другом и эквидистантно направляющей канавке зубчатыми замкнутыми контурами, жестко закрепленной на промежуточной секции и размещенной вдоль последней зубчатой рейкой и зубчатыми колесами, смонтированными на упомянутой вертикальной оси цтепного контура с возможностью зацепления одного и другого с упомянутыми зубчатыми контурами, а третьего - с зубчатой рейкой, при этом звездочки цепного контура закреплены на упомянутой балке, вертикальная ось этого контура размещена нижним концом в направляющей канавке, а паз в промежуточной секции расположен параллельно продольной оси последней.
Фиг.1
24гг
Фиг.З.
16
бидВ
24 9П -97 { Ч -/Я /J 4 2
12 (- // /J /о I ., ,
21
бидВ
ФигЛ
Фиг.5
/5
2f 78 J
г--3 - -7- VIt
Фиг. 7
тох
--0
О
О
Физ.8
О
О
//
(J
