Изобретение относится к грузоподъемным машинам и предназначено для предохранения элементов конструкции от воздействия нагрузок, превышающих предельно допустимые с точки зрения работоспособности и прочности, и может быть преимущественно использовано для срыва настылей с горловины конвертеров с помощью якоря.
Целью изобретения является повышение надежности.
На чертеже изображен ограничитель, общий вид в разрезе.
Ограничитель содержит плиту 1, в которой в сквозном вертикальном пазу 2 с возможностью возвратно-поступательного перемещения установлена штанга 3 с упорными выступами 4.
В нижней части штанга 3 осью 5 соединена с якорем 6, который посредством ограничительной цепи 7 соединен с плитой 1. По бокам штанги 3 на плите 1 на осях 8
из контакта с захватными элементами 14, после чего штанга 3 падает, перемещаясь вниз в сквозном вертикальном пазу 2. Вместе со щтангой 3 вниз, на длину ограничительной цепи 7, перемещается якорь 6. После выхода из контакта с захватными элементами 14 упорных выступов 4 под действием усилия сжатого блока 16 пружин двуплечие рычаги 9 займут исходное положение.
10 Такое положение ограничителя является нерабочим, так как разорвана кинематическая цепь между якорем и крюком крана (цепь 7 выполняет только роль ограничителя перемещения и не рассчитана на кую-либо значительную нагрузку, чем гарантируется невозможность воздействия на кран нагрузки, превыщающей номинальную грузоподъемность.
Для возвращения ограничителя в исходс возможностью поворота установлены дву- 20 „ое (рабочее) положение его опускают кра- плечие рычаги 9 образующие верхние 10 ином до упора о любую опорную поверх11
нижние 11 плечи. Возле нижних плеч 11 двуплечих рычагов 9 с возможностью перемещения по направляющему пазу 12 в вертикальной плоскости на осях 13 свободно подвешены захватные элементы 14, на которые опираются упорные выступы 4 штанги 3. С зазором к захватным элементам 14 на плите 1 установлены упоры-ограничители 15. Захватные элементы опираются на
ность (пол разливочного пролета, опора или бочка конвертера и т. п.). После упора якоря 6 в опорную поверхность штанга 3 начинает при дальнейшем, опускании плиты 1 за счет опускания крюка крана перемещаться в вертикальном сквозном пазу 2 вверх, при этом упорные выступы 4 упираются в захватные элементы 14 и начинают перемещать их вверх. Направляюнижние плечи 11 двуплечих рычагов 9, а верх- 30 Щие пазы 12 захватных элементов 14
ние плечи 10 двуплечих рычагов 9 соеди нены между собой посредством упругого элемента 16, например блока пружин.
В верхней части плиты 1 выполнено фигурное отверстие 17 для установки (навески) устройства на крюк (не показан) крана.
Исходное (рабочее) положение устройства соответствует приведенному.
Ограничитель работает следующим образом.
Ограничитель за фигурное отверстие 17 подвешивается на крюке (не показан) крана и транспортируется, например, к горловине конвертера для выполнения операции срыва настылей. Под настыль подводится якорь 6, при подъеме которого крюком крана производится ее срыв.
При этом усилие, развиваемое краном и не превышающее установленного усилия блока пружин, передается от крюка через плиту 1, оси 8, нижние плечи 11 двуплечих рычагов 9, захватные элементы 14, упорные выступы 4, щтангу 3, ось 5 на якорь 6.
При усилии, превышающем усилие блока 16 пружин, двуплечие рычаги 9 поворачиваются на осях 8 и верхние плечи 10 перемещаются одно навстречу другому, а нижние плечи 11 расходятся в противоположных направлениях до тех пор, пока упорные выступы 4 штанги 3 не выйдут
перемещаются относительно установленных в них осей 13. Упоры-ограничители 15 препятствуют возможности поворота захватных элементов 14 вокруг осей 13 при движении упорных выступов 4 со щтангой 3 вверх. 35 Перемещение захватных элементов 14 осуществляется до тех пор, пока упорные выступы 4 штанги 3 не выходят из контакта с захватными элементами 14, которые под действием собственного веса самостоятельно опускаются в нижнее исходное положение. Этим восстанавливается силовая кинетическая связь, ограничитель приведен в исходное (рабочее) положение и может быть использован для дальнейшей работы. Следует отметить, что восстановление кинематической связи, т. е. приведение ограничителя в исходное положение, осуществляется без затрат ручного труда и использования дополнительных механизмов.
40
45
50
55
Формула изобретения
Ограничитель грузоподъемности крана содержащий средство подвески к грузоподъемному механизму, шарнирно установленные на нем двуплечие рычаги, одни из плеч которых соединены упругими элементами и зацеп, установленный с возможностью возвратно-поступательного перемещения относительно средства подвески, выполненный с криволинейной рабочей поверхностью
из контакта с захватными элементами 14, после чего штанга 3 падает, перемещаясь вниз в сквозном вертикальном пазу 2. Вместе со щтангой 3 вниз, на длину ограничительной цепи 7, перемещается якорь 6. После выхода из контакта с захватными элементами 14 упорных выступов 4 под действием усилия сжатого блока 16 пружин двуплечие рычаги 9 займут исходное положение.
0 Такое положение ограничителя является нерабочим, так как разорвана кинематическая цепь между якорем и крюком крана (цепь 7 выполняет только роль ограничителя перемещения и не рассчитана на ка5 кую-либо значительную нагрузку, чем гарантируется невозможность воздействия на кран нагрузки, превыщающей номинальную грузоподъемность.
Для возвращения ограничителя в исход0 „ое (рабочее) положение его опускают кра- ном до упора о любую опорную поверх„ое (рабочее) положение его опускают кра- ном до упора о любую опорную поверхность (пол разливочного пролета, опора или бочка конвертера и т. п.). После упора якоря 6 в опорную поверхность штанга 3 начинает при дальнейшем, опускании плиты 1 за счет опускания крюка крана перемещаться в вертикальном сквозном пазу 2 вверх, при этом упорные выступы 4 упираются в захватные элементы 14 и начинают перемещать их вверх. НаправляюЩие пазы 12 захватных элементов 14
Щие пазы 12 захватных элементов 14
перемещаются относительно установленных в них осей 13. Упоры-ограничители 15 препятствуют возможности поворота захватных элементов 14 вокруг осей 13 при движении упорных выступов 4 со щтангой 3 вверх. Перемещение захватных элементов 14 осуществляется до тех пор, пока упорные выступы 4 штанги 3 не выходят из контакта с захватными элементами 14, которые под действием собственного веса самостоятельно опускаются в нижнее исходное положение. Этим восстанавливается силовая кинетическая связь, ограничитель приведен в исходное (рабочее) положение и может быть использован для дальнейшей работы. Следует отметить, что восстановление кинематической связи, т. е. приведение ограничителя в исходное положение, осуществляется без затрат ручного труда и использования дополнительных механизмов.
Формула изобретения
Ограничитель грузоподъемности крана, содержащий средство подвески к грузоподъемному механизму, шарнирно установленные на нем двуплечие рычаги, одни из плеч которых соединены упругими элементами, и зацеп, установленный с возможностью возвратно-поступательного перемещения относительно средства подвески, выполненный с криволинейной рабочей поверхностью.
1604723
56
отличающийся тем, что, с целью повышениясимметрии средства подвески фигурным вы- надежности, он снабжен установленными наступом на втором конце для взаимодействия средстве подвески осями и по крайнейс криволинейной рабочей поверхностью заце- мере одной парой захватов, каждый из ко-па, гибкими элементами, одни концы которых установлен с возможностью взаимо-5 торых закреплены на средстве подвески, действия наружной стороной со свободныма другие - на зацепе со стороны послед- плечом двуплечего рычага, и выполнен сонего, при этом зацеп выполнен с хвосто- сквозным продольным пазом на одном концевиком в виде штанги, а средство подвес- для свободного размещения в нем однойки - со сквозным продольным пазом для из упомянутых осей и направленным к осиразмещения штанги.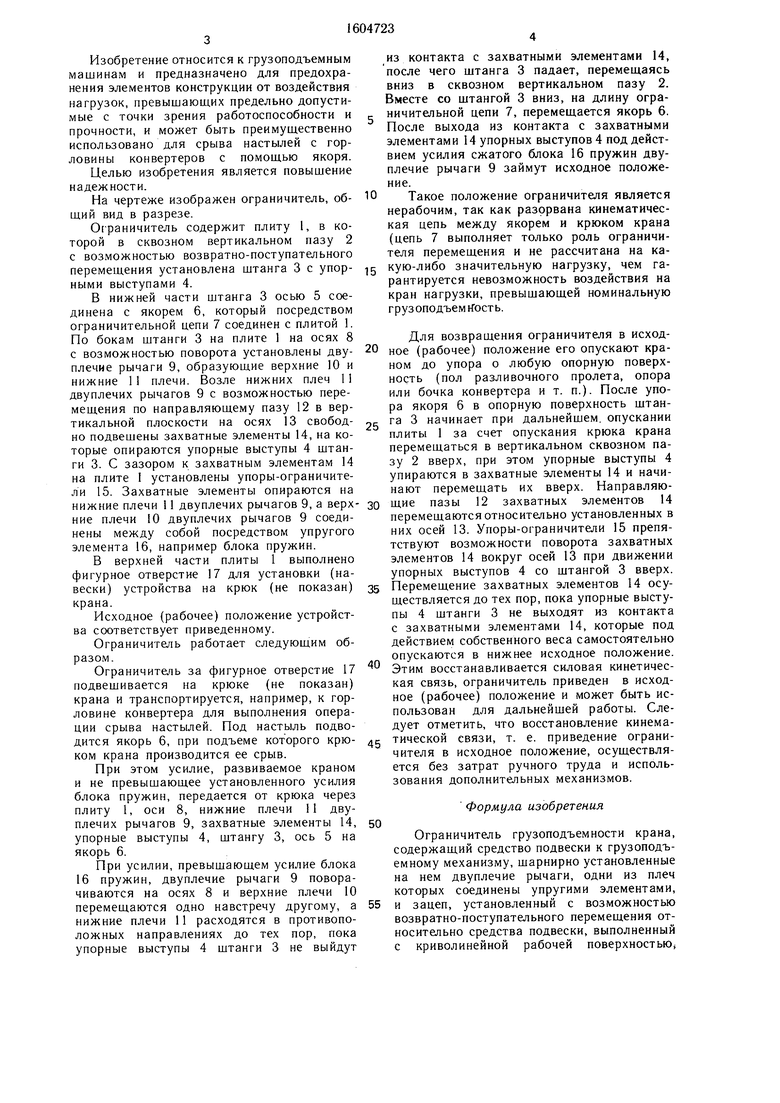
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1985 |
|
SU1306887A1 |
| Захватное устройство для штучных грузов | 1989 |
|
SU1765096A1 |
| Грузозахватная система | 1985 |
|
SU1414753A1 |
| Грузозахватное устройство | 1982 |
|
SU1098896A1 |
| Захватное устройство для изделий с конусной вертикальной полостью | 1990 |
|
SU1740303A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2010 |
|
RU2453491C1 |
| Траверса для подъема барабанов | 1973 |
|
SU537929A1 |
| Механизм управления захватными органами грузозахватного устройства | 1983 |
|
SU1137055A1 |
| Захватное устройство для грузов с отбортовкой | 1983 |
|
SU1085925A1 |
| Захват Панькова для штучных грузов | 1981 |
|
SU1020352A1 |
Изобретение относится к грузоподъемным машинам, предназначено для предохранения элементов конструкции от воздействия нагрузок, превышающих предельно допустимые с точки зрения работоспособности и прочности, и позволяет повысить надежность устройства. Это достигается тем, что средство навески на крюк грузоподъемной машины выполнено в виде плиты 1, в которой установлена с возможностью возвратно-поступательного перемещения штанга 3 с упорными выступами 4. Двуплечие рычаги 9 установлены на плите 1 по обе стороны от штанги 3, а захватные элементы 14 подвешены с возможностью перемещения в вертикальной плоскости на плите 1 между двуплечими рычагами 9 и штангой 3. Причем упорными выступами 4 штанга опирается на захватные элементы 14, которые в свою очередь опираются на нижние плечи 11 рычагов 9. 1 ил.

| Ограничитель грузоподъемности крана | 1985 |
|
SU1324997A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| горно-металлургический Завенягина | |||
