нф позицию сброса в зону захвата его механизмом 10 подъема. Рулон 27, ра- нфе сброшенный с каретки 2„ захва- тывается с помощью гибкого органа 24, До того, как механизм 10 подъема придет в исходное положение, его захватная каретка проходи над сброшенным с каретки 2 рулоном и в конца поворота, направляющих II фиксатор в виде двуплечего рычага взаимодействует с неподвижным упором. Каретка вместе с упругим флажком 15 перемещается плавно под действием гидравлического амортизатора под рулон 27 для его захвата. За флажком 15 следуют, упираясь в них, захватные элементы которые с возможностью поворота установлены на штанге, обеспечивающей с помощью шестерен и зубчатых реек перпендикулярность оси штанги относительно оси направляющих I I. При таком перемещении захватные элементы в виде П-образных зацепов 20 перемещаются по направляющим 1 и приходят в крайнее положение под рулон 27 для его захвата. Такелажный узел поднимает направляющую I1, которая поворачивается в шарнирах 13. При наклоне направляющих 1 1 в сторону кантования рулонов 27 под действием сил веса рулон 27 начинает перемещаться вниз, при этом зацеп 20 не позволяет рулону 27 изменять своего положения относительно оси направляющих 11. 3 ил.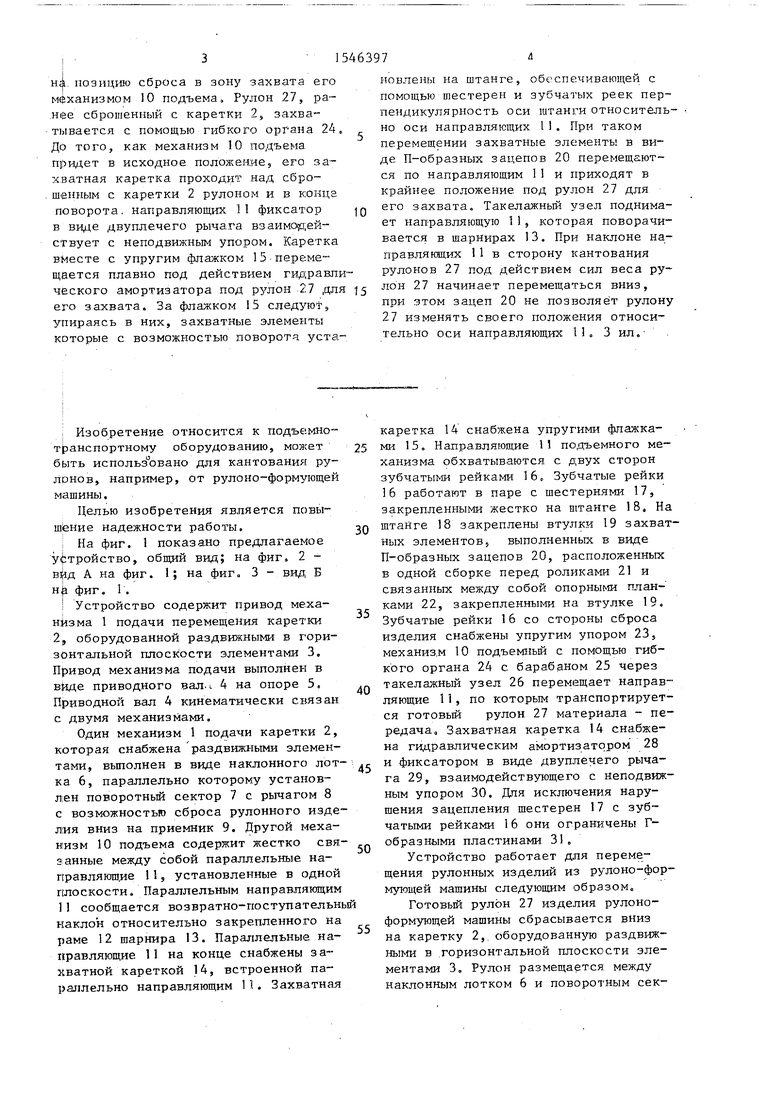
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки рулонов | 1987 |
|
SU1481169A1 |
| ТРАВЕРСА, МЕХАНИЗМ ВЫРАВНИВАНИЯ БАЛАНСИРОВКИ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ТАКЕЛАЖНОЕ УСТРОЙСТВО НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ГРУЗОФИКСИРУЮЩЕЕ СРЕДСТВО ТАКЕЛАЖНОГО УСТРОЙСТВА НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ОПОРНЫЙ СТАПЕЛЬ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, СПОСОБ РАВНОВЕСНОЙ НАСТРОЙКИ ТРАВЕРСЫ НА ОПОРНЫХ СТАПЕЛЯХ, СПОСОБ ПЕРЕМЕЩЕНИЯ ТРАВЕРСОЙ ИЗДЕЛИЯ | 2008 |
|
RU2376237C1 |
| Устройство кривовязюков для вырубкизАгОТОВОК из пОлОСОВОгО илЕНТОчНОгО МАТЕРиАлА | 1979 |
|
SU804501A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Устройство для перемещения изделий | 1987 |
|
SU1495055A1 |
| Манипулятор | 1986 |
|
SU1371851A1 |
| Автоматическое грузозахватное устройство | 1984 |
|
SU1184792A1 |
| Автоматический комплекс для штамповки деталей из полосового и ленточного материала | 1987 |
|
SU1551451A1 |
| Установка Кривовязюка для вырубки заготовок из плоского материала | 1981 |
|
SU958083A1 |
| Установка для перегрузки штучных грузов | 1989 |
|
SU1775338A1 |

Изобретение относится к подъемно-транспортному оборудования и решает задачу повышения надежности работы устройства и исключения ручного труда за счет автоматизации процесса укладки рулонных изделий. Готовый рулон 27 сбрасывают вниз от рулоно-формующей машины на каретку 2 между наклонным лотком 6 и поворотным сектором 7. Отрезают материал и закрепляют виток материала на рулоне 27. Механизм подачи 1 перемещает рулон 27 на позицию сброса в зону захвата его механизмом подъема 10. Рулон 27, ранее сброшенный с каретки 2, захватывается с помощью гибкого органа 24. До того, как механизм подъема 10 придет в исходное положение, его захватная каретка проходит над сброшенным с каретки 2 рулоном и в конце поворота направляющих 11 фиксатор в виде двуплечего рычага взаимодействует с неподвижным упором. Каретка вместе с упругим флажком 15 перемещается плавно под действием гидравлического амортизатора под рулон 27 для его захвата. За флажком 15 следуют, упираясь в них, захватные элементы, которые с возможностью поворота установлены на штанге, обеспечивающей с помощью шестерен и зубчатых реек перпендикулярность оси штанги относительно оси направляющих 11. При таком перемещении захватные элементы в виде П-образных зацепов 20 перемещаются по направляющим 11 и приходят в крайнее положение под рулон 27 для его захвата. Такелажный узел поднимает направляющую 11, которая поворачивается в шарнирах 13. При наклоне направляющих 11 в сторону кантования рулонов 27 под действием сил веса рулон 27 начинает перемещаться вниз, при этом зацеп 20 не позволяет рулону 27 изменять своего положения относительно оси направляющих 11. 3 ил.
Изобретение относится к подъемно- транспортному оборудованию, может быть использЪвано для кантования рулонов, например, от рулоно-формующей машины.
Целью изобретения является повышение надежности работы.
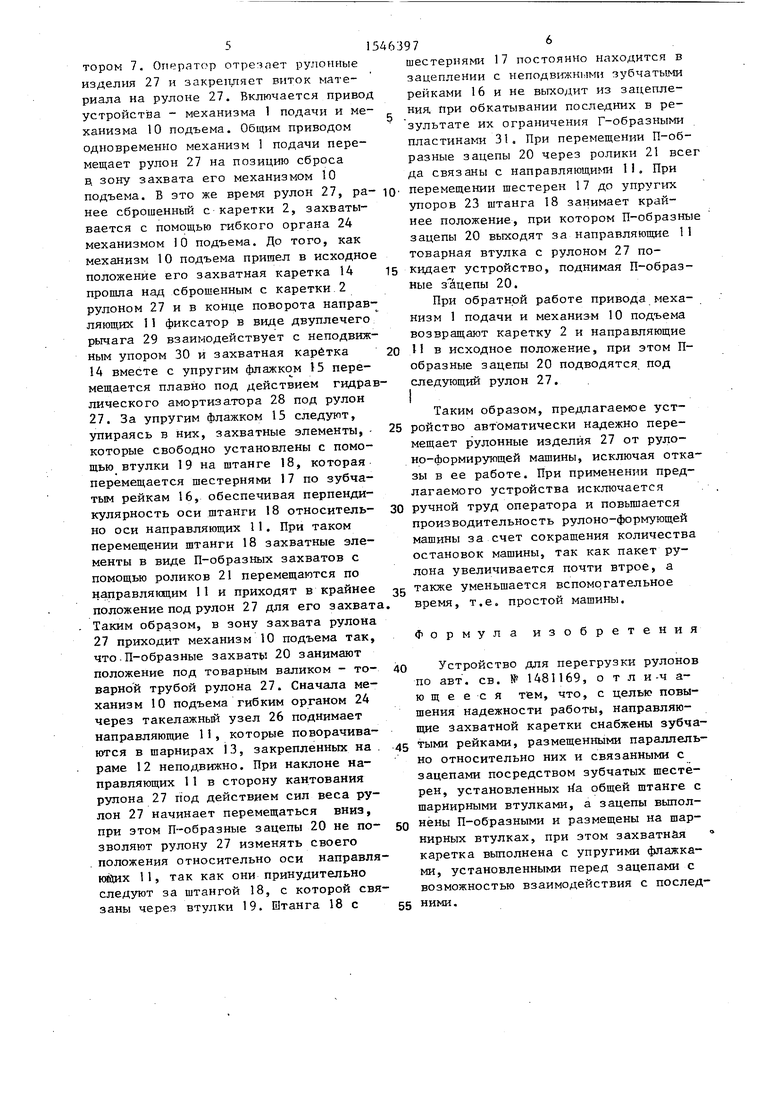
На фиг. 1 показано предлагаемое устройство, общий вид; на фиг, 2 - А на фиг. 1; на фиг, 3 - вид Б нЈ фиг. 1.
Устройство содержит привод механизма 1 подачи перемещения каретки 2„ оборудованной раздвижными в горизонтальной плоскости элементами 3. Привод механизма подачи выполнен в виде приводного вал. t 4 на опоре 5, Приводной вал 4 кинематически связан с двумя механизмами.
Один механизм 1 подачи каретки 2, которая снабжена раздвижными элементами, выполнен в виде наклонного лот- ка 6, параллельно которому установлен поворотный сектор 7 с рычагом 8 с возможностью сброса рулонного изделия вниз на приемник 9. Другой механизм 10 подъема содержит жестко связанные между собой параллельные направляющие 11, установленные в одной плоскости. Параллельным направляющим 11 сообщается возвратно-поступательны наклон относительно закрепленного на раме 12 шарнира 13. Параллельные направляющие 11 на конце снабжены захватной кареткой 14, встроенной параллельно направляющим 1I. Захватная
5
0
5
0
,
0
5
каретка 14 снабжена упругими флажками 15. Направляющие 11 подъемного механизма обхватываются с двух сторон зубчатыми рейками 16„ Зубчатые рейки 16 работают в паре с шестернями 17, закрепленными жестко на штанге 18, На штанге 18 закреплены втулки 19 захватных элементов; выполненных в виде П-образных зацепов 20, расположенных в одной сборке перед роликами 21 и связанных между собой опорными планками 22, закрепленными на втулке 19, Зубчатые рейки 16 со стороны сброса изделия снабжены упругим упором 23, механизм 10 подъемный с помощью гибкого органа 24 с барабаном 25 через такелажный узел 26 перемещает направляющие 11, по которым транспортируется готовый рулон 27 материала - передача. Захватная каретка 14 снабжена гидравлическим амортизатором 28 и фиксатором в виде двуплечего рычага 29, взаимодействующего с неподвижным упором 30. Для исключения нарушения зацепления шестерен 17 с зубчатыми рейками 16 они ограничены Г- образными пластинами 31.
Устройство работает для перемещения рулонных изделий из рулоно-формующей машины следующим образом.
Готовый рулон 27 изделия рулоно- формующей машины сбрасывается вниз на каретку 2, оборудованную раздвижными в горизонтальной плоскости элементами 3. Рулон размещается между наклонным лотком 6 и поворотным сек
тором 7. Опрратор отрезает рулонные изделия 27 и закрепляет виток материала на рулоне 27. Включается приво устройства - механизма 1 подачи и механизма 10 подъема. Общим приводом одновременно механизм 1 подачи перемещает рулон 27 на позицию сброса д зону захвата его механизмом 10 подъема. В это же время рулон 27, ра нее сброшенный с каретки 2, захватывается с помощью гибкого органа 24 механизмом 10 подъема. До того, как механизм 10 подъема пришел в исходно положение ЕГО захватная каретка 14 прошла над сброшенным с каретки 2 рулоном 27 и в конце поворота направляющих 11 фиксатор в виде двуплечего рычага 29 взаимодействует с неподвижным упором 30 и захватная каретка 14 вместе с упругим флажком 15 перемещается плавно под действием гидралического амортизатора 28 под рулон 27. За упругим флажком 15 следуют, упираясь в них, захватные элементы, которые свободно установлены с помощью втулки 19 на штанге 18, которая перемещается шестернями 17 по зубчатым рейкам 16, обеспечивая перпендикулярность оси штанги 18 относительно оси направляющих 11. При таком перемещении штанги 18 захватные элементы в виде П-образных захватов с помощью роликов 21 перемещаются по направляющим 11 и приходят в крайнее положение под рулон 27 для его захват Таким образом, в зону захвата рулона 27 приходит механизм 10 подъема так, что П-образные захваты 20 занимают положение под товарным валиком - товарной трубой рулона 27. Сначала механизм 10 подъема гибким органом 24 через такелажный узел 26 поднимает направляющие 11, которые поворачиваются в шарнирах 13, закрепленных на раме 12 неподвижно. При наклоне направляющих 11 в сторону кантования рулона 27 под действием сил веса рулон 27 начинает перемещаться вниз, при этом П-образные зацепы 20 не позволяют рулону 27 изменять своего положения относительно оси направляющих 11, так как они принудительно следуют за штангой 18, с которой связаны через втулки 19. Штанга 18 с
15
20
ю55
4fi3976
шестернями 17 постоянно находится в зацеплении с неподвижнпми зубчатыми рейками 16 и не выходит из зацепления, при обкатывании последних в результате их ограничения Г-образными пластинами 31. При перемещении П-образные зацепы 20 через ролики 21 всег да связаны с направляющими 11. При перемещении шестерен 17 до упругих упоров 23 штанга 18 занимает крайнее положение, при котором П-образные зацепы 20 выходят за направляющие 11 товарная втулка с рулоном 27 покидает устройство, поднимая П-образные з ацепы 20.
При обратной работе привода механизм 1 подачи и механиэм 10 подъема возвращают каретку 2 и направляющие 11 в исходное положение, при этом floe разные зацепы 20 подводятся под следующий рулон 27.
Таким образом, предлагаемое уст- ройство автоматически надежно перемещает рулонные изделия 27 от руло- но-формирующей машины, исключая отказы в ее работе. При применении предлагаемого устройства исключается ручной труд оператора и повышается производительность рулоно-формующей машины за счет сокращения количества остановок машины, так как пакет рулона увеличивается почти втрое, а также уменьшается вспомогательное время, т.е. простой машины.
Формула изобретения
Устройство для перегрузки рулонов по авт. св. № 1481169, о т л и-ч а- ю щ е е с я тем, что, с целью повышения надежности работы, направляющие захватной каретки снабжены зубча- тыми рейками, размещенными параллельно относительно них и связанными с зацепами посредством зубчатых шестерен, установленных ria общей штанге с шарнирными втулками, а зацепы выпол
нены П-образными и размещены на шарнирных втулках, при этом захватная каретка выполнена с упругими флажками, установленными перед зацепами с возможностью взаимодействия с последними.
Фиг
23
3ff
a
| Устройство для перегрузки рулонов | 1987 |
|
SU1481169A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
