(54) УСТРОЙСТВО КОНТРОЛЯ МЕСТОНАХОЖДЕНИЯ
СТРУГА И УПРАВЛЕНИЯ ПРИВОДОМ СТРУГОВОЙ
1
Изобретение относится к горной промышленности, а именно к области автоматизации горных машин, и может быть использовано для автоматизации струговых установок.
Известно устройство контроля местонахождения струга, содержащее датчик оборотов звездочки, узел ввода, реверсивный счетчик, связанный с цифровым индикатором и узлом задания участков работы, схему совпадения и блок управления с индикатором направления 1.
НедостатколГ этого устройства является невозможность обеспечения точной остановки исполнительного органа струговой установки в конечных точках лавы из-за наличия разброса величин свободного выбега, зависящего от горно-геологических и технологических условий.
Известно также устройство контроля местонахождения струга и управления приводом струговой установки, содержащее датчик перемещения струга, соединенный через входной блок с реверсивным счетчиком, ко входам которого подключены индикатор местонахождения струга и узел задания пределов
УСТАНОВКИ
реверсирования, блок оперативного управления, схему совпадения, блок управления приводом, подключенный к магнитному пускателю электропривода струга. Устройство предназначено для управления струговой установкой с приводом постоянного тока и позволяет повысить точность остановки струга за счет снижения скорости его движения до заданного уровня при подходе к точкам остановки 2.
Однако для своей реализации устройство
10 требует применения регулируемого привода. В то же время электроприводы серийно выпускаемых струговых установок являются нерегулируемыми и не позволяют плавно или дискретно изменять скорость движения ис15полнительного органа в процессе работы струга, т.е. для этих стругов известное устройство не может быть применено.
Цель изобретения - повышение надежности контроля и управления и повышение
20 безопасности ведения работ за счет уменьшения и стабилизации величины свободного выбега исполнительного органа струга.
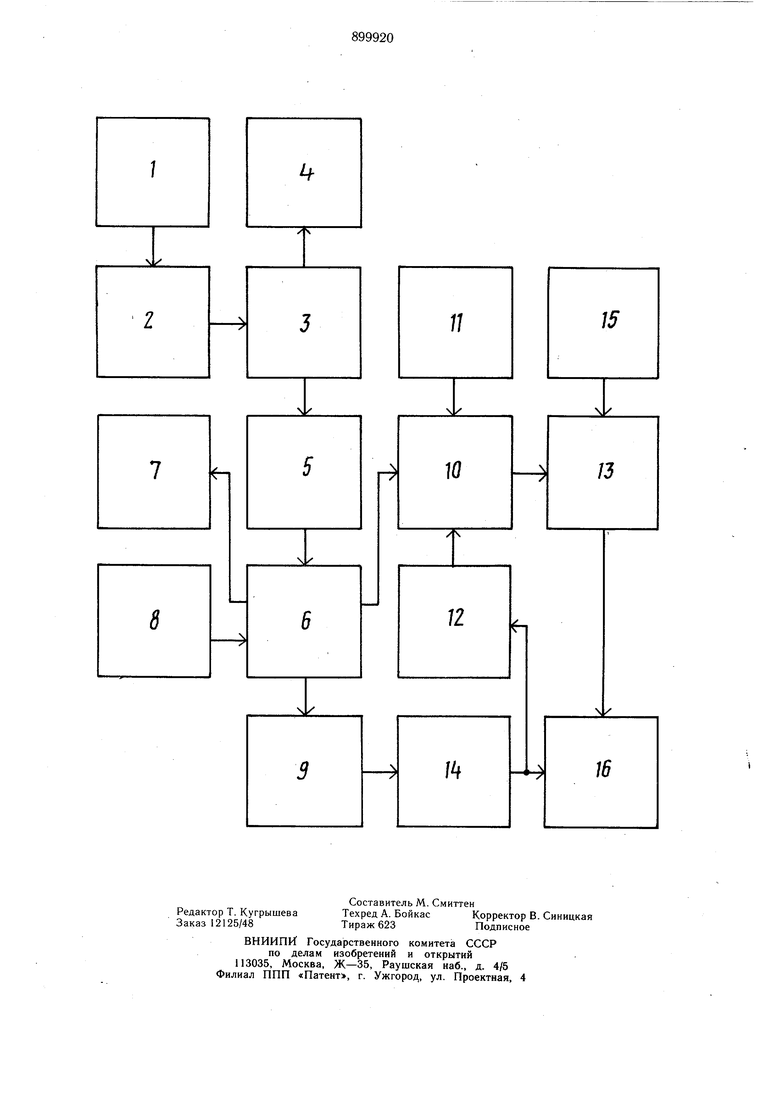
Поставленная цель достигается тем, что устройство снабжено блоком динамического торможения, узлом контроля направления движения, узлом контроля включенного состояния электронривода, дополнительным магнитным пускателем и узлом контроля нахожу1ения струга в зоне торможения, причем вход блока динамического торможения через схему совпадения соединен с выходами узла контроля нахождения струга в зоне торможения, узла контроля включенного состояния электропривода и узла контроля направления движения, подключенным .к блоку управления приводом и к выходам блока оперативного управления и узла задания пределов реверсирования, а дополнительный магнитный пускатель соединен с блоком динамического торможения. На чертеже представлена блок-схема устройства. Устройство содержит датчик 1 перемеш,ения струга, входной блок 2, реверсивный счетчик 3, индикатор 4 местонахождения струга, узел 5 задания пределов реверсирования 5, узел 6 контроля направления движения, индикатор 7 направления движения, блок 8 оперативного управления, блок 9 управления приводом, схему 10 совпадения, узел 11 контроля нахождения струга в зоне торможения, блок 12 контроля включенного состояния электропривода струга, блок 13 дина.мического торможения, .магнитные пускатели 14 и 15, электропривод 16 струга. Устройство работает следующим образом. Сигналы от датчика 1 перемещения, который может быть связан например, с приводной звездой струга, поступает на входной б.юк 2, который выполняет функции приема сигналов от датчика 1 и подачи продвигающи.хся импульсов на шины сложения или вычитания ( в зависимости от направления вращения приводной звезды) реверсивного счетчика 3. С реверсивного счетчика сигналы поступают на индикатор 4 местонахождения струга и на узел 5 задания пределов реверсирования, который осуществляет выдачу команды на реверсирование привода 16 на заданном участке лавы. С узла 5 задания пределов реверсирования сигнал подается на узел 6 контроля направления движения, необходимость применения которого вызвана тем, что реверсирование привода должно производиться при достижении стругом заданного 11ре;.1ела только в том случае, если струг двигается в сторону, этого предела. Сигналы с этого узла поступают на индикато) 7. направления движения и нл блок 9 управления приводом, который выдает команду на включение или отключение магнитного пускателя 14 электропривода струга. Блок 8 оперативного управления выдает сигналы на узел 6 и служит для осуществления уирав.юния стругом от кнопок, напри.ме) в ре.монтном режиме. Наличие узла 11 контро;1я нахождения струга в зоне торможения определяется тем, что тор.можение привода струга нужно производить только в заданной зоне на конечных участках лавы, а пределы реверсирования могут быть заданы в любых точках, в которых осуществлять торможение нет необходимости. Сигнал с это го узла поступает на схему 10 совпадения, которая при наличии сигналов с узлов 6 и 12 выдает команду на включение блока 13 динамического торможения, который в свою очередь осуществляет торможение электропривода 16. Питание блока 13 динамического торможения осуществляется от дополнительного магнитного пускателя 15. Узел 12 контроля включенного состояния электропривода струга выдает сигнал на схему 10 совпадения только после отключения .магнитного пускате.тя 14, т.е. после перевода привода струга из двигательного режима в отключенное состояние. Связь между узлом 6 контроля направления движения и схемой 10 совпадения обеспечивает торможение электропривода только при движении исполнительного органа струга в сторону заданного преде.па торможения. Введение отдельного узла 12 контроля включенного состояния электропривода вызвано следующим. В случае сигнал о включенном состоянии электропривода .может быть снят с магнитного пускателя с по.мощью его блокконтактов. Однако в суп1сствуюпи1х схемах электроснабжения струговых установок магнитные пускатели не и.меют свободных блокконтактов. В связи с эти.м возникает необ- . ходимость введения узла 12, который конструктивно может представлять собой релейный блок, питающийся от трансформаторов тока, через отверстия которых пропущены силовые жилы питания электропривода. Узел 11 контроля нахождения струга в зоне торможения может представлять собой датчик, расположенный на границе зоны, в которой необходи.мо производить торможение, и имеющий механическую или магнитную связь с исполнительны.м органо.м струга струговой установки. Поскольку инфор.мацию о местонахождении исполните.1ьного органа несет в себе реверсивный счетчик 3, то узел 11 может также быть выполнен, например в виде релейного элемента, и получать информацию о вхождении струга в зону торможения от счетчика 3. При приходе исполнительного органа на границу, зоны узел 11 выдает сигнал на схему совпадения, разрешающий включение торможения. Блок 8 оперативного управления связан с узлом 6 контроля направления движения для исключения возможности ошибочного запуска струга в сторону приводной станции, который может привести к «наезду исполнительного органа на приводную головку. Узел 6 связан со схемой ГО совпадения для осуществления торможения в заданной
зоне на конечном участке лавы только при движении струга в сторону нриводной головки.
Таким образом, предлагаемое устройство позволяет:
уменьшить и стабилизировать величину свободного выбега струга в конечных точках лавы при использовании нерегулируемого электропривода;
уменьшить размеры ниш и количество ручного труда по их зачистке;
увеличить ресурс струговой установки за счет исключения «наездов исполнительного органа струга на приводную станцию;
повысить безопасность ведения работ за счет исключения ударов струга в узел переходной рамы;
уменьшить затраты времени на выполнение концевых операций, что является одним из факторов повышения эксплуатационной производительности струговой установки.
Формула изобретения
Устройство контроля местонахождения струга и управления приводом струговой установки, содержащее датчик перемещения струга, соединенный через входной блок с реверсивным счетчиком, ко входам которого
подключены, индикатор местона.хождспщя струга и узел задания пределов реверсирования, блок оперативного управ.тепия, схему совпадения, блок управления приводом, подключенный к магнитному пускателю электропривода струга, отличающееся тем, что, с целью повышения надежности контроля и управления и повышения безопасности ведения работ, оно снабжено блоком динамического торможения, узлом контроля направления движения, узлом контроля включенного состояния электропривода, дополнительным магнитным пускателем и узлом контроля нахождения струга в зоне торможения, причем вход блока динамического торможе-. ния через схему совпадения соединен с выходами узла контроля нахождения струга в зоне торможения, узла контроля включенного состояния электропривода и узла контроля направления движения, подключенным к блоку управления приводом и к выхо- дам блока оперативного управления и узла задания пределов реверсирования, а дополнительный магнитный пускатель соединен с блоком динамического торможения.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР jYo 357344, кл. Е 21 С 27/18, 1970.
2. Авторское свидетельство СССР № 583297, кл. Е 21 С 27/18, 1975.
W
(/
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления системой пылеподавления струговой установки | 1982 |
|
SU1092281A1 |
| Система автоматического управления струговой установкой | 1977 |
|
SU1002602A1 |
| Устройство контроля местонахождения струга в лаве | 1975 |
|
SU583297A1 |
| Способ дискретного контроля местонахождения в лаве исполнительного органа струга и устройство для его осуществления | 1986 |
|
SU1382949A1 |
| Устройство для контроля местонахождения струга в лаве | 1979 |
|
SU883408A1 |
| Способ диагностирования предельных искривлений конвейерного става струговой установки в плоскости пласта | 1983 |
|
SU1348513A1 |
| УСТРОЙСТВО КОНТРОЛЯ МЕСТОНАХОЖДЕНИЯ СТРУГАВ ЛАВЕ | 1972 |
|
SU357344A1 |
| Устройство контроля местонахождения рабочего органа выемочной машины | 1977 |
|
SU691561A1 |
| СИСТЕМА ТЕЛЕМЕХАНИКИ ДЛЯ ОБЪЕКТОВ С ИНЕРЦИОННЫМИ ИСПОЛНИТЕЛЬНЫМИ МЕХАНИЗМАМИ | 1973 |
|
SU393762A1 |
| Способ автоматического секционного орошения забоя при выемке угля стругом | 1973 |
|
SU672350A1 |
e.
8
NX
/
W
13
12
(-,
16
/
x
