Слд 00 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для захвата и разгрузкиКОНТЕйНЕРОВ C цАпфАМи | 1979 |
|
SU819041A1 |
| МОБИЛЬНАЯ ПЕРЕГРУЗОЧНАЯ УСТАНОВКА | 1993 |
|
RU2097305C1 |
| Захватное устройство для труб | 1986 |
|
SU1425165A1 |
| Захватное устройство для раскрывающейся тары | 1988 |
|
SU1654226A1 |
| Устройство для уплотнения грунта | 1989 |
|
SU1659587A1 |
| Грузоподъемное устройство | 1982 |
|
SU1085929A1 |
| Захватное устройство для контейнеров | 1984 |
|
SU1196328A1 |
| Захватное устройство для труб | 1982 |
|
SU1178680A1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305638C1 |
| МОСТОВОЙ КРАН | 1969 |
|
SU247482A1 |
Изобретение относится к подъемно-транспортному машиностроению, а именно к захватным устройствам. Цель изобретения - упрощение конструкции путем исключения силового привода на устройстве. Захватное устройство для контейнеров с рымами содержит траверсу 1 , к которой посредством шарнирных штанг 2 прикреплены несущие бал- ; ки 3, на концах каждой .из которых установлены подпружиненные крюки 6. К штангам посредством шарнирных тяг 8 прикреплен блок 9, огибаемый тяговым канатом 10. На траверсе 1 закреплена проушина 14, а балки 3 соединены телескопическими штангами 13. При опускании устройства на крьш1у контейнера балки 3 расходятся под действием веса траверсы 1, а крюки 6 захватывают рым контейнера. При подъеме устройства за канат 10 крюки 6 упираются в рымы контейнера, обеспечивая его удержание. Для освобояухения контейнера устройство поднимают за проушину 14. При использовании устройства на кранах с двумя грузоподъемными механизмами отпадает необходимость в силовом приводе для перемещения балок 3. 4 ил. (Л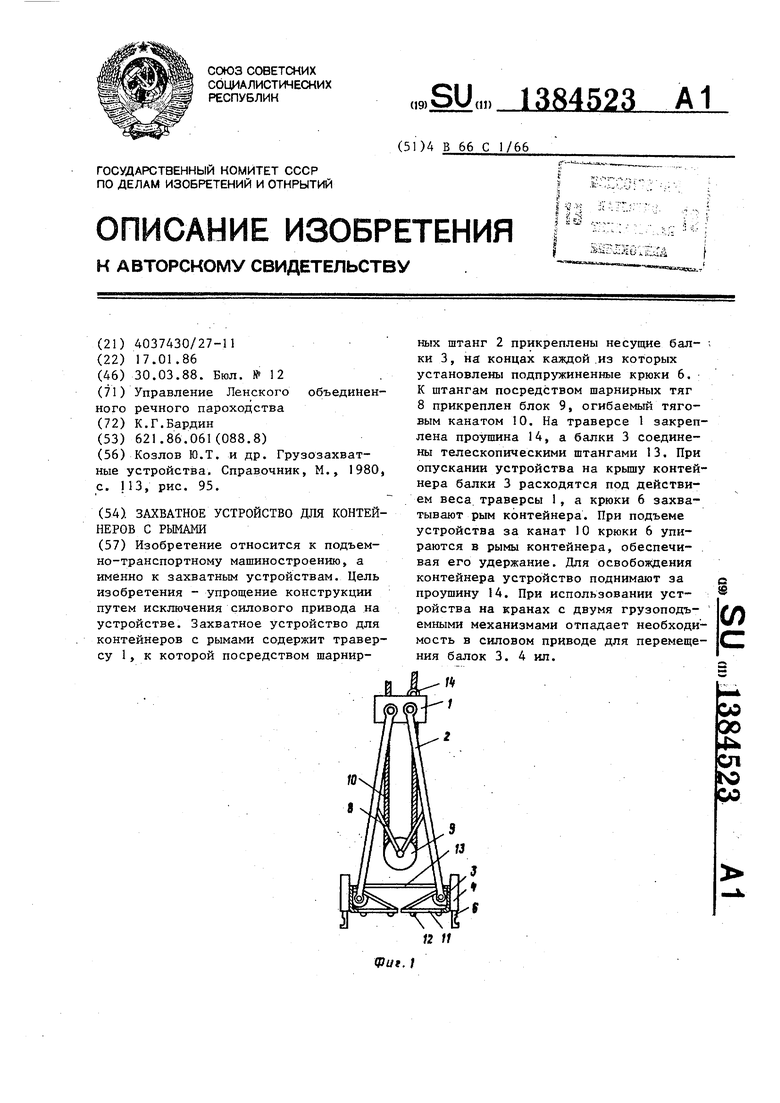
Фиг. 1
Изобретение относится к подъемно- транспортному машиностроению, а именно к захватным устройствам для сред- нетоннажных контейнеров, оборудованных подъемными приспособлениями в виде рымов.
Цель изобретения - упрощение конструкции путем иключения силового привода на устройстве.
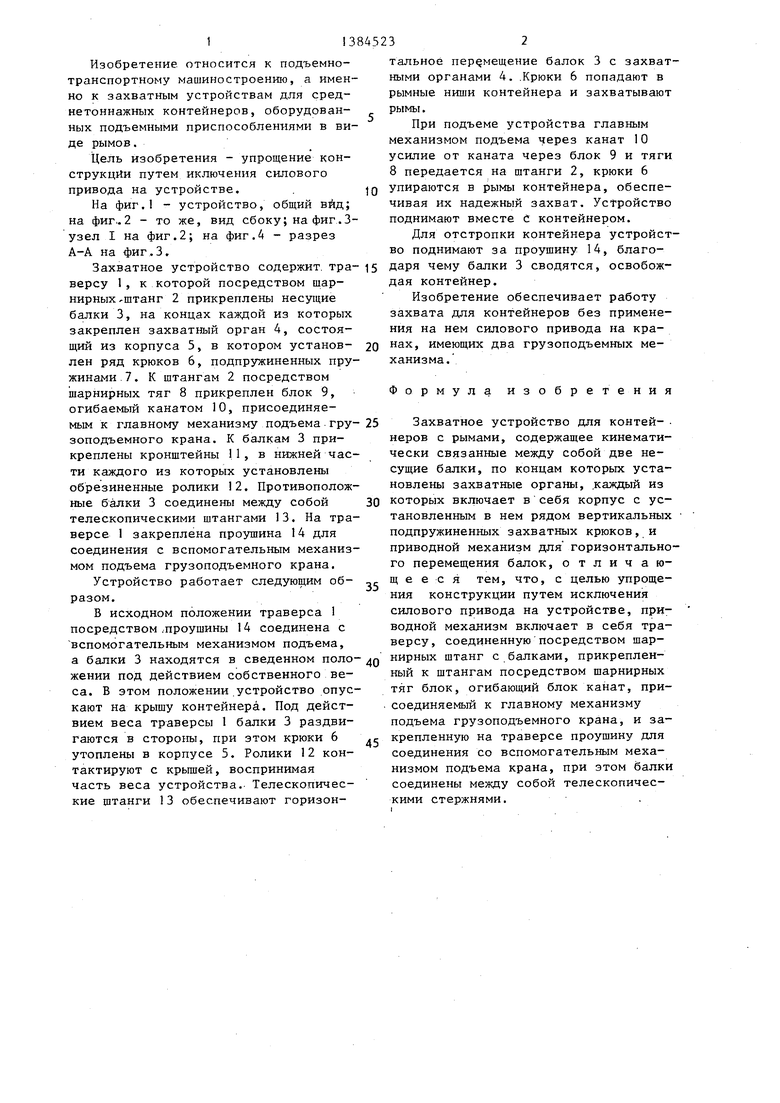
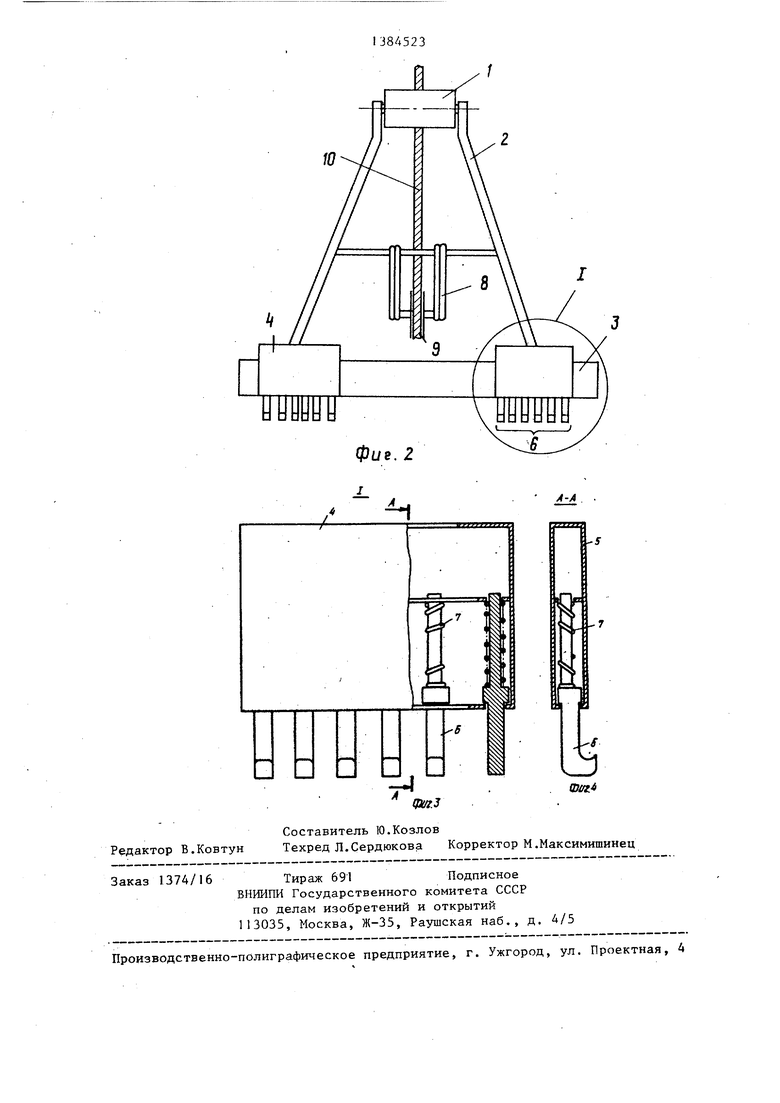
На фиг,1 - устройство, общий вид; на фиг..2 - то же, вид сбоку; на фиг.3- узел I на фиг.2; на фиг.4 - разрез А-А на фиг.З,
Захватное устройство содержит, тра-15 чему балки 3 сводятся, освобож
версу 1, к которой посредством шарнирных,штанг 2 прикреплены несущие балки 3, на концах каждой из которых закреплен захватный орган 4, состоящий из корпуса 5, в котором установлен ряд крюков 6, подпружиненных пружинами . 7. К штангам 2 посредством шарнирных тяг 8 прикреплен блок 9, огибаемый канатом 10, присоединяе- мьм к главному механизму подъема гру- зоподъемного крана. К балкам 3 прикреплены кронштейны 11, в нижней части каждого из которых установлены обрезиненные ролики 12. Противоположные балки 3 соединены между собой телескопическими штангами 13. На траверсе 1 закреплена прозтаина 14 для соединения с вспомогательным механизмом подъема грузоподъемного крана.
Устройство работает следуюп1им образом.
В исходном положении траверса 1 посредством/проушины 14 соединена с вспомогательным механизмом подъема.
а балки 3 находятся в сведенном поло- Q мирных штанг с балками, прикрепленный к штангам посредством шарнирных тяг блок, огибающий блок канат, присоединяемый к главному механизму подъема грузоподъемного крана, и закрепленную на траверсе проушину для соединения со вспомогательным механизмом подъема крана, при этом балки соединены между собой телескопическими стержнями.
жении под действием собственного веса. В этом положении устройство опускают на крышу контейнера. Под действием веса траверсы 1 балки 3 раздвигаются в стороны, при этом крюки 6 утоплены в корпусе 5. Ролики 12 контактируют с крьш1ей, воспринимая часть веса устройства. Телескопические щтанги 13 обеспечивают горизон
тальноё перемещение балок 3 с захватными органами 4. .Крюки 6 попадают в рымные НШ11И контейнера и захватывают рымы.
При подъеме устройства главным механизмом подъема через канат 10 усилие от каната через блок 9 и тяги 8 передается на штанги 2, крюки 6 упираются в рымы контейнера, обеспечивая их надежный захват. Уctpoйcтвo поднимают вместе С контейнером.
Для отстропки контейнера устройство поднимают за проушину 14, благо0
5
0
5
дая контейнер.
Изобретение обеспечивает работу захвата для контейнеров без применения на нем силового привода иа кранах, имеющих два грузоподъемных механизма.
Формула изобретения
Захватное устройство для контей- неров с рымами, содержащее кинематически связанные между собой две несущие балки, по концам которых установлены захватные органы, .каждый из которых включает в себя корпус с установленным в нем рядом вертикальных подпружиненных захватных крюков, и приводной механизм для горизонтального перемещения балок, отличающееся тем, что, с целью упрощения конструкции путем исключения силового привода на устройстве, приводной механизм включает в себя траверсу, соединенную посредством шармирных штанг с балками, прикреплен
ный к штангам посредством шарнирных тяг блок, огибающий блок канат, присоединяемый к главному механизму подъема грузоподъемного крана, и закрепленную на траверсе проушину для соединения со вспомогательным механизмом подъема крана, при этом балки соединены между собой телескопическими стержнями.
Редактор В.Ковтун
S
CiJ
аиг4 Ф1а.3
Составитель Ю.Козлов
Техред Л.Сердюкова Корректор М.Максимишинец
Л-А .
| Козлов Ю.Т | |||
| и др | |||
| Грузозахватные устройства | |||
| Справочник, М., 1980, с | |||
| ПЗ, рис | |||
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
