СА:
00 4
оо
О5 О5
фиг. Г
Изобретение относится к машиностроению н может быть использовано в транспортгых средствах.
Цель изобретения - расширение кинематических возможностей привода путем обеспечения независимого автоматического регулирования нескольких валов от одного или нескольких двигателей, например свободно-поршневых двигателей..
На фиг. 1 изображен автоматический привод, разрез; на фиг. 2 - раэ- рез А-А на фиг. 1; на фиг. 3 - кине
ных валах 7 будет меняться угол . -.а- крутки упругих элементов 8 и, следовательно, изменяться скорость враще- . кия валов . При неподвижных дополш-г- тельньгх валах угол закрутки будет максимальным. При прямом и обратном ходе ведущего штока 2 движение передается на разные кинематически не сеязанньш между собой валы, которые вращаются поочередно в одну и ту же сторону независимо один от другого. что. позволяет использовать привод без дифференциала. Масса маховиков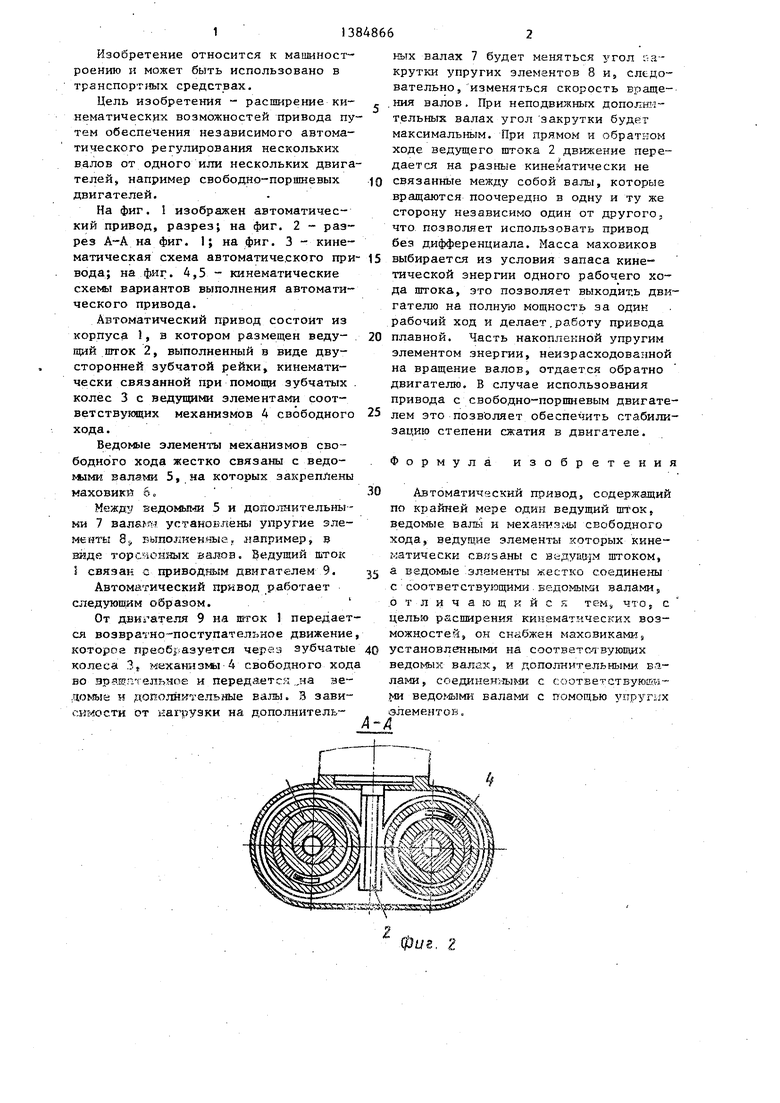
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический привод | 1990 |
|
SU1772493A1 |
| Способ работы роторно-лопастного двигателя или машины внутреннего сгорания и устройство для его осуществления | 2018 |
|
RU2711128C2 |
| Бесступенчатая импульсная передача | 1981 |
|
SU989208A1 |
| Силовая установка | 1987 |
|
SU1636576A1 |
| Предохранительное устройство | 1978 |
|
SU806184A1 |
| Регулятор скорости вращения ведомого вала | 1981 |
|
SU960757A1 |
| Бесступенчатая импульсная передача | 1983 |
|
SU1104329A1 |
| Коробка передач транспортного средства | 1982 |
|
SU1081012A1 |
| ПЛАНЕТАРНАЯ ПЕРЕДАЧА С РЕГУЛИРУЕМЫМ ПЕРЕДАТОЧНЫМ ОТНОШЕНИЕМ | 2007 |
|
RU2347965C1 |
| Регулируемая передача | 1980 |
|
SU875140A1 |

Изобретение относится к машиностроению и может быть использовано в транспортШ)1х средствах. Цель изобретения - расширение кинематических возможностей привода путем обеспечения независимого автоматического регулирования нескольких-валов от одного или нескольких двигателей. Ведущий шток 2, выполненный в виде двух- сторонней зубчатой рейки, кинематически связан при помощи зубчатых колес 3 с ведущими элементами соответствующих механизмов свободного хода 4. От двигателя 9 на шток 1 передается возвратно-поступательное движение, которое преобразуется через зубчатые колеса 3 и механизмы свободного хода 4 во вращательное и передается на ведомые и дополнительные валы. В зависимости от нагрузки на дополнительных валах 7 будет меняться угол закрутки упругих элементов 8 и скорость вращения валов. 5 ил. с € (Л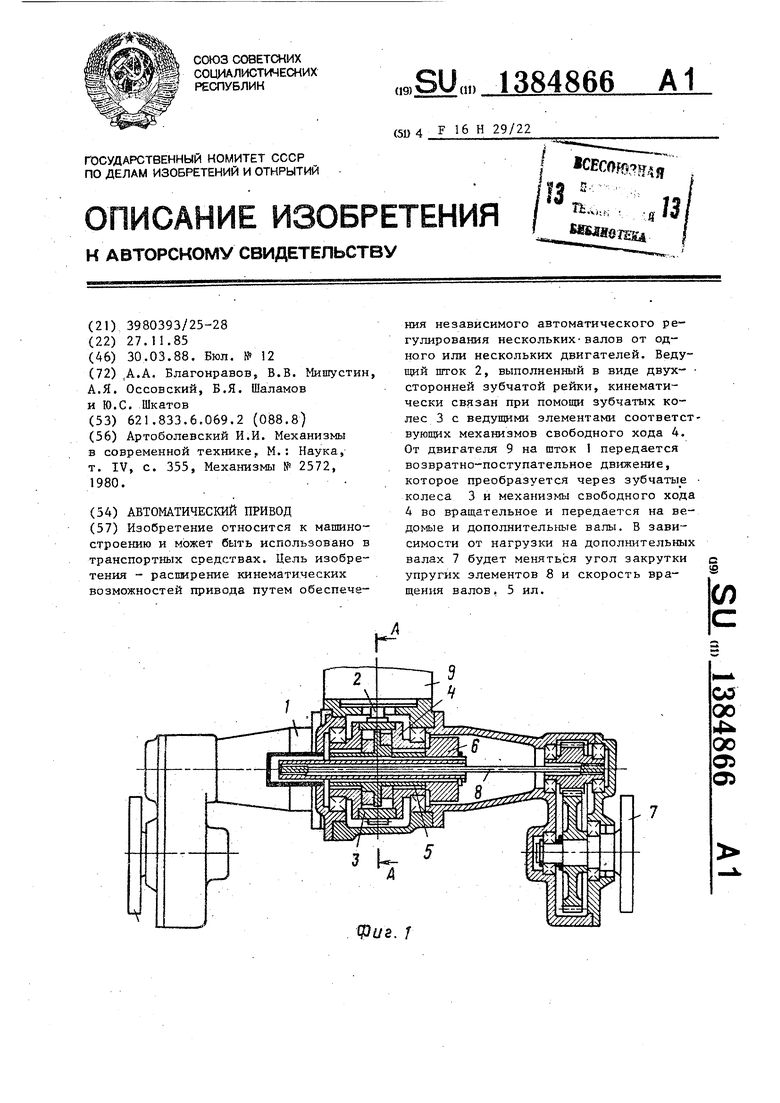
матическая схема автоматического при- 15 выбирается из условия запаса киневода; на фиг. 4,5 - кинематические схемы вариантов выполнения автоматического привода.
Автоматический привод состоит из корпуса 1, в котором размещен веду- . 20 щий шток 2, выполненный в виде двусторонней зубчатой рейки, кинематически связанной при помопщ зубчатых . колес 3 с ведущими элементами соответствующих механизмов 4 свободного 25 хода..
Ведомые элементы механизмов свободного хода жестко связаны с ведо- валами 5, на которых закреплены маховики &о 30
Межд:;; 5 и дополмительны- ки 7 . установленьг упругие зле- менты 8с БЬ1полиен,ные, например, в виде торсионных залов. Ведущий шток 1 связан о приводным двигателем 9. 35
Автоматический привод работает следующим образом.
От двигателя 9 на пп-ок 1 передается возвратно-поступательное движение.
тической энергии одного рабочего х да штока, это позволяет выходит.ь д гателю на полную мощность за один рабочий ход и делает.работу привод плавной. Часть накопленной упруги элементом энергии, неизрасходованн на вращение валов, отдается обратн двигателю. В случае использования привода с свободно-поршневым двига лем это позв оляет обеспечить стаби зацию степени сжатия в двигателе.
Формула изобретен
Автоматичйский привод, содержащ по крайней мере один ведущий шток, ведомые вальт и меха 1из:-1Ы свободног хода, ведущие элементы которых кин матически связаны с ведуац-|м штоком а ведомые элементы жестко соединен с соответствующими.ведомыми валами .о тли ч а КЗ щ к и с я тем, что, целью расширения кинематических во можностей, он снабжен маховиками
которой преобразуется через зубчатые 40 установленными на соотватс т-вующих колеса 3$ механизмы 4 свободного хода
во зран,тельное и передается „на зе- и дополнительные ВАЛЫ, В зависимости от нагрузки на дополнительА-А
ведомых валак, и допол нительными в лами, соединеН ;.-1Ы|.ш с соответствуюш ми ведо1 1ыми валами с помощью ухтруг элементов.
тической энергии одного рабочего хода штока, это позволяет выходит.ь двигателю на полную мощность за один рабочий ход и делает.работу привода плавной. Часть накопленной упругим элементом энергии, неизрасходованной на вращение валов, отдается обратно двигателю. В случае использования привода с свободно-поршневым двигателем это позв оляет обеспечить стабилизацию степени сжатия в двигателе.
Формула изобретения
Автоматичйский привод, содержащий по крайней мере один ведущий шток, ведомые вальт и меха 1из:-1Ы свободного хода, ведущие элементы которых кинематически связаны с ведуац-|м штоком, а ведомые элементы жестко соединены с соответствующими.ведомыми валами, .о тли ч а КЗ щ к и с я тем, что, с целью расширения кинематических возможностей, он снабжен маховиками
40 установленными на соотватс т-вующих
А-А
ведомых валак, и допол нительными валами, соединеН ;.-1Ы|.ш с соответствуюши- ми ведо1 1ыми валами с помощью ухтруг;,х элементов.
Zi A f Syfi Si
фиг. 2
ф
-лЛАЛ
ф
Ф
Ф
Ф
S
г-ДМгФи.З
Фиг. If
§
г4лг-AW
ф
Л)
Фиг. 5
Ф
| Артоболевский И.И | |||
| Механизмы в современной технике, М.: Наука, т | |||
| IV, с | |||
| Приспособление для увеличения сцепной силы тяги паровозов и других повозок | 1919 |
|
SU355A1 |
