у Z.
K///yi4j M///////.-
/ / м /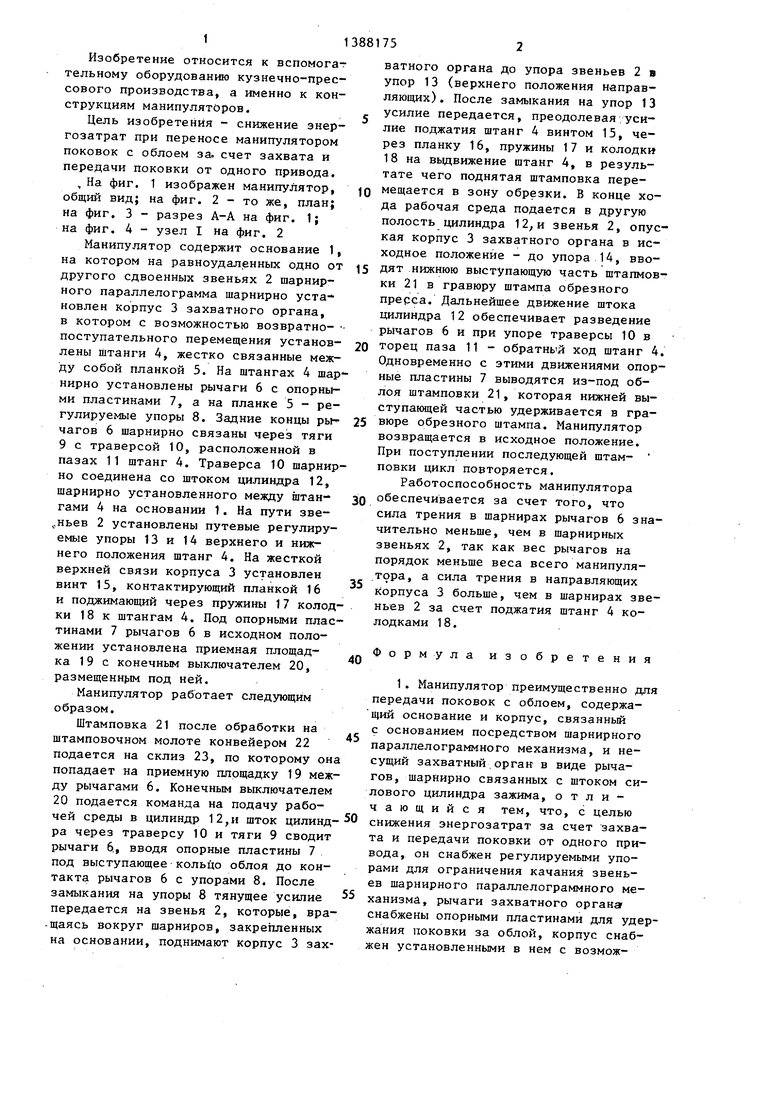
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор к ковочным вальцам | 1973 |
|
SU651885A1 |
| МАНИПУЛЯТОР К ШТАМПОВОЧНОМУ МОЛОТУ | 1990 |
|
RU2036040C1 |
| Устройство для подачи штамповок | 1987 |
|
SU1473895A1 |
| ШТАМП ДЛЯ ОБЪЕМНОГО ДЕФОРМИРОВАНИЯ И ОБРЕЗКИ ПОКОВОК | 1992 |
|
RU2018401C1 |
| Автоматическая линия штамповки поворотных кулаков | 1987 |
|
SU1466868A1 |
| Устройство к обрезному штампудля удАлЕНия ОблОя | 1978 |
|
SU810354A1 |
| Инструмент для молотовой штамповки | 1981 |
|
SU986569A1 |
| Автоматическая линия горячей штамповки | 1981 |
|
SU996037A1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| Устройство для обрезки и прошивки поковок | 1977 |
|
SU673370A1 |
Изобретение относится к вспомогательному оборудованию для обработки давлением и может быть использовано в производствах горячей штамповки для подачи штамповок в гравюру обрезного пресса. Цель - снижение энергозатрат при переносе манипулятором поковок с облоем за счет захвата и передачи поковки .от одного привода. Манипулятор содержит основание 1, на котором на шарнирных звеньях 2 параллелограммного механизма шарнирно установлен корпус 3 захватного органа, в котором с возможностью возвратно-поступательного движения установлены штанги (Ш) 4, жестко связанные между собой планкой, На Ш 4 шарнирно установлены рычаги 6 с опорными пластинами, а на пленке - регулируемые упоры. Задние концы рычагов 6 шарнирно связаны через тяги с траверсой и расположены в пазах Ш 4. Траверса шарнирно соединена со штоком цилиндра 12, шарнирно установленного между Ш 4 на основании 1. На пути шарнирных звеньев 2 установлены путёвые регулируемые упоры 13 и 14 верхнего и нижнего положения Ш 4. На жесткой верхней связи корпуса 3 установлен винт, контактирующий планкой и поджимающий через пружины колодки к Ш 4. 1 з.п. ф-лы, 4 ил. С
фцв.1
Изобретение относится к вспомога-г тельному оборудованию кузнечно-прес- сового производства, а именно к конструкциям манипуляторов.
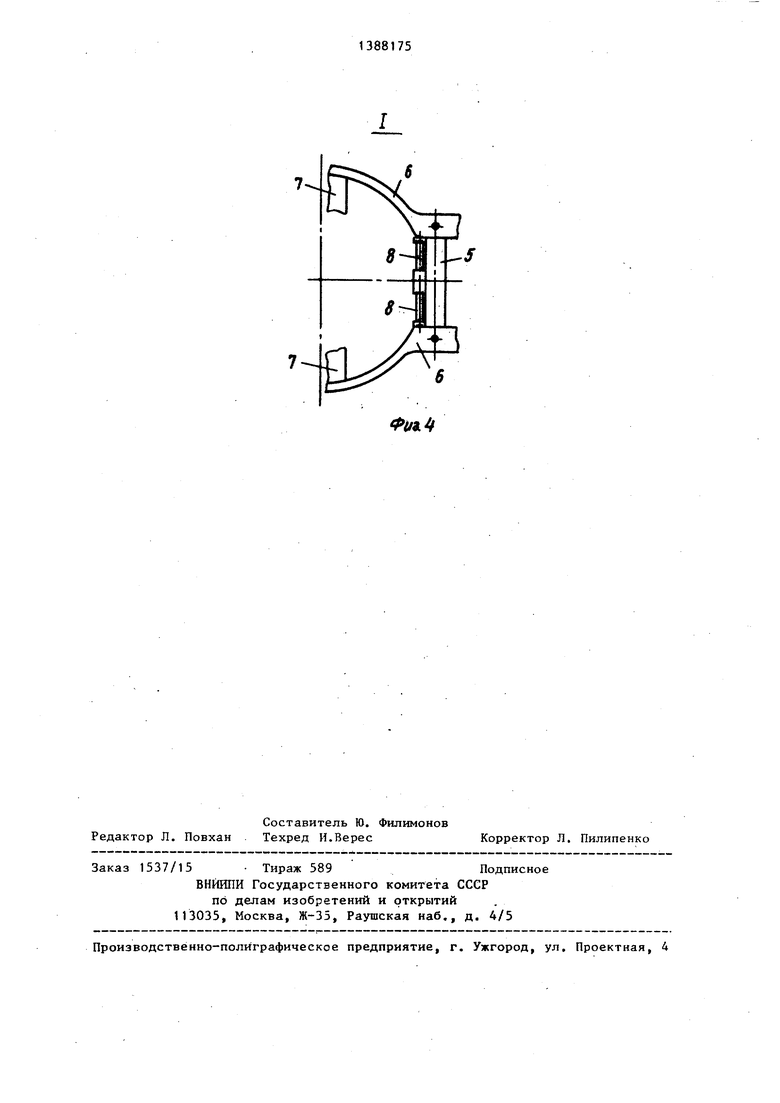
Цель изобретения - снижение энергозатрат при переносе манипулятором поковок с облоем за. счет захвата и передачи поковки от одного привода, , На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - то же, план; на фиг, 3 - разрез А-А на фиг, 1; на фиг. 4 - узел I на фиг. 2
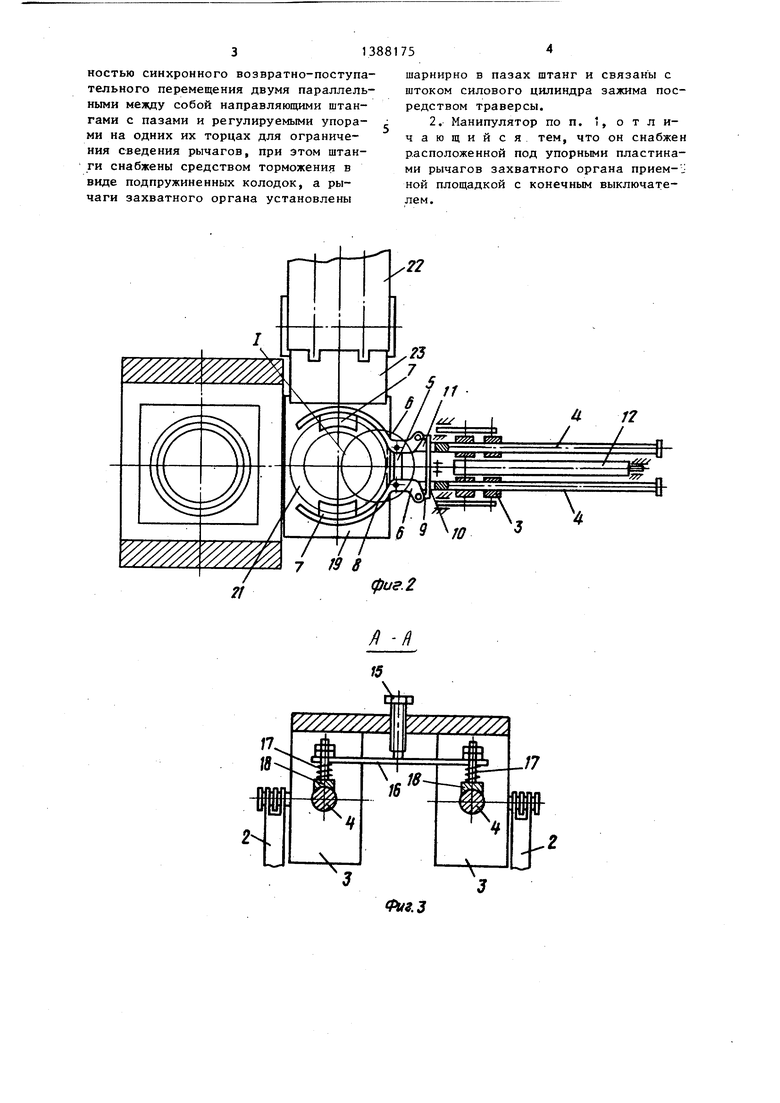
Манипулятор содержит основание 1, на котором на равноудаленных одно от другого сдвоенных звеньях 2 шарнирного параллелограмма шарнирно уста- новлен корпус 3 захватного органа, в котором с возможностью возвратно- поступательного перемещения установлены штанги А, жестко связанные между собой планкой 5. На штангах 4 шар нирно установлены рычаги 6 с опорными пластинами 7, а на планке 5 - регулируемые упоры 8. Задние концы рычагов 6 шарнирно связаны через тяги 9 с траверсой 10, расположенной в пазах 11 штанг 4, Траверса 10 шарнирно соединена со штоком цилиндра 12, шарнирно установленного между штан- гами 4 на основании 1, На пути зве- ,ньев 2 установлены путевые регулируемые упоры 13 и 14 верхнего и нижнего положения штанг 4. На жесткой верхней связи корпуса 3 установлен винт 15, контактирующий планкой 16 и поджимающий через пружины 17 колодки 18 к штангам 4. Под опорными пластинами 7 рычагов 6 в исходном положении установлена приемная площадка 19 с конечным выключателем 20, размещенн$ 1м под ней.
Манипулятор работает следующим образом.
Штамповка 21 после обработки на штамповочном молоте конвейером 22 подается на склиз 23, по которому он попадает на приемную площадку 19 между рычагами 6. Конечным выключателем 20 подается команда на подачу рабочей среды в цилиндр 12,и шток цилиндра через траверсу 10 и тяги 9 сводит рычаги 6., вводя опорные пластины 7 под выступающеекольцо облоя до контакта рычагов 6 с упорами 8. После замыкания на упоры 8 тянущее усилие передается на звенья 2, которые, вра -щаясь вокруг шарниров, закрепленных на основании, поднимают корпус 3 зах
0
5
0
5
0
5
0
5
ватного органа до упора звеньев 2 в упор 13 (верхнего положения направляющих) . После замыкания на упор 13 усилие передается, преодолевая:усилие поджатия штанг 4 винтом 15, через планку 16, пружины 17 и колодки 18 на выдвижение штанг 4, в результате чего поднятая штамповка перемещается в зону обрезки. В конце хода рабочая среда подается в другую полость цилиндра 12, и звенья 2, опуская корпус 3 захватного органа в исходное положение - до упора 14, вводят нижнюю выступающую часть штапмов- ки 21 в гравюру штампа обрезного прерса. Дальнейшее движение штока цилиндра 12 обеспечивает разведение рычагов 6 и при упоре траверсы 10 в торец паза 11 - обратный ход штанг 4. Одновременно с этими движениями опорные пластины 7 выводятся из-под облоя штамповки 21, которая нижней выступающей частью удерживается в гравюре обрезного штампа. Манипулятор возвращается в исходное положение. При поступлении последующей штамповки цикл повторяется.
Работоспособность манипулятора обеспечивается за счет того, что сила трения в шарнирах рычагов 6 значительно меньше, чем в шарнирных звеньях 2, так как вес рычагов на порядок меньше веса всего манипулятора, а сила трения в направляющих Корпуса 3 больше, чем в шарнирах звеньев 2 за счет поджатия штанг 4 колодками 18.
Формула изобретения
шарнирно в пазах штанг и связаны с штоком силового цилиндра зажима посредством траверсы.
22
1
фиг. 2
ft -fl
17
Фиг.З
Ptft.
| Инструментальный манипулятор | 1977 |
|
SU650708A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| ,(54) МАНИПУЛЯТОР | |||
