Изобретение относится к машиностроению, в частности к станкостроению.
Цель изобретения - повышение точности останова и фиксации тягового органа.
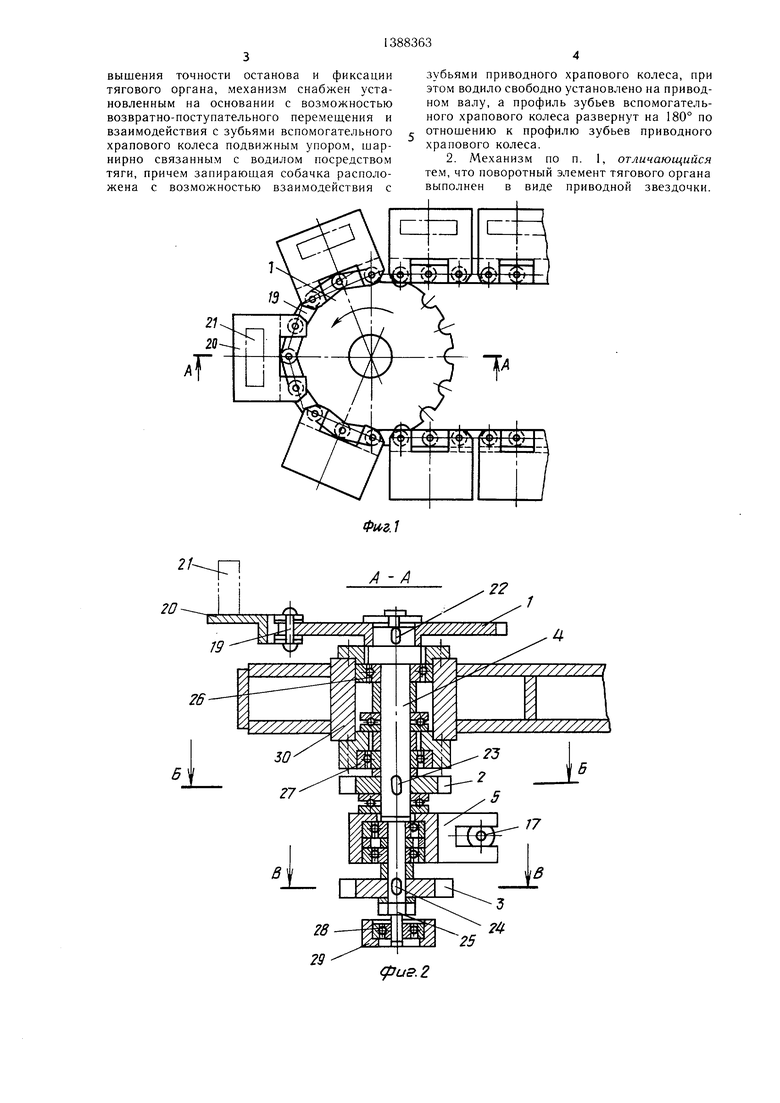
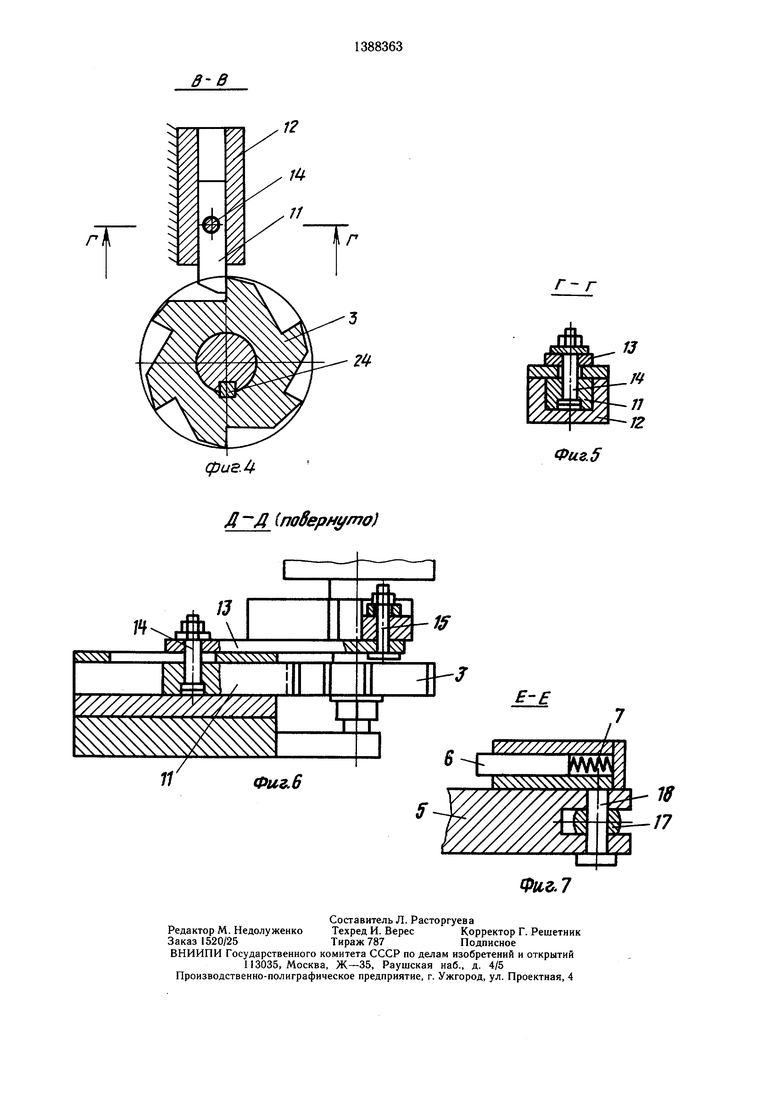
На фиг. 1 изображен механизм, план; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 2; на фиг. 4 - сечение В-В на фиг. 2; на фиг. 5 - сечение Г-Г на фиг. 4; на фиг. 6 - сечение Д-Д на фиг. 3; на фиг. 7 - сечение Е-Е на фиг. 3.
Механизм содержит поворотный элемент тягового органа в виде приводной звездочки 1, приводное 2 и вспомогательное 3
буемое расстояние. Вращение звездочки 1 продолжается до тех пор, пока зуб делительного диска 3 не встретится с подвижным упором 11, перемеш,ающимся ему навстречу в корпусе 12. Перемеш,ение упора 11 осуществляется тягой 13, кинематически связывающей водило 5 и упор 11 при помощи осей 14 и 15. В конце поворота приводного храпового колеса 2, запирающая собачка 8, смонтированная в неподвижном корпусе 10, под действием пружины 9 заскакивает во впадину храпового колеса 3. Запирающая собачка 8 требуется для того, чтобы при холостом ходе водила 5 от сил трения подающей собачки 6 о поверхность
храповые колеса, которые смонтированы на
валу 4, водило 5, свободно вращающееся зуба приводного храпового колеса 2 послед- на приводном валу 4, подающую собачку 6, нее не могло повернуться, подпружиненную пружиной 7 к приводному
храповому колесу 2 и установленную на во- диле 5, расположенную с возможностью взаимодействия с зубьями приводного храпового колеса 2, запирающую собачку 8 с 20 пружиной 9, смонтированные в неподвижном корпусе 10, подвижный упор 11, установленный с возможностью возвратно-поступательного перемещения в неподвижном корпусе 12 и взаимодействия с зубьями вспомогательного храпового колеса 3, тягу 13, кинематически связывающую водило 5 и подвижный упор 11 с помощью осей 14 и 15, привод водила в виде приводного гидроцилиндра 16, шток которого связан с во25
Таким образом, звездочка 1 с валом 4 в состоянии покоя оказываются зафиксированными между упором 11 и собачками 6 и 8, а вместе с ними и цепь 19 со столиками 20 и изделиями 21. При обратном ходе гидроцилиндра 16 водило 5 вращается по часовой стрелке, при этом подающая собачка 6, перемещающаяся по криволинейной поверхности зуба приводного храпового колеса 2, сжимает пружину 7 и в конце хода водила 5 под действием этой же пружины заскакивает во впадину приводного храпового колеса 2. Одновременно при повороте водила 5 тяга 13 отводит упор 11 от делительного диска для возможности поворота
дилом 5 при помощи серьги 17 и оси 18. На -, его при рабочем ходе водила 5. Положе- lr водила 5, тяги 13, подвижного упора
11 в конце холостого хода цилиндра 16 показано на фиг. 3 пунктирными линиями.
тяговом органе цепи 19 смонтированы столики 20, на которых устанавливаются обрабатываемые изделия 21. Звездочка 1, приводное храповое колесо 2, вспомогательное храповое колесо 3 связаны с валом 2 при помощи щпонок 22-24.
Вспомогательное храповое колесо 3 выполняет функции длительного диска и установлено таким образом, что профиль его зубьев развернут на 180° по отношению к профилю зубьев приводного храпового колеса 2.
На конце вала 4 под вспомогательным храповым колесом 3 расположена гайка 25, с помощью которой производится затяжка всех элементов конструкции на валу 4. Вал
35
40
Данный механизм обеспечивает высокую точность деления, так как при повороте делительного диска подвижный упор, обеспечивающий фиксацию механизма в состоянии покоя, находится в отведенном от него положении, в результате чего не происходит износа поверхностей зубьев делительного диска и поверхности подвижного упора. Точность деления зависит только от точности изготовления делительного диска. Кроме того, обеспечивается возможность использования механизма, например, в кон4 смонтирован на подшипниках 26 и 27. .с вейерах, имеющих больщие перемещающиеКонец вала 4 поддерживается подщипником 28, смонтированным в планке 29. Приводной вал 4 смонтирован на корпусе 30, установленном на основании 31, на котором также установлена запирающая собачка 8 и корпус 12 подвижного упора 11.
Механизм работает следующим образом.
ся массы.
Формула изобретения
1. Механизм для сообщения прерывисто- 50 го движения тяговому органу, содержащий установленный на основании приводной вал, водило, смонтированные на приводном валу поворотный элемент тягового органа, привод ное храповое колесо и вспомогательное храповое колесо, расположенную на водиле
1. Механизм для сообщения прерывисто- 50 го движения тяговому органу, содержащий установленный на основании приводной вал, водило, смонтированные на приводном валу поворотный элемент тягового органа, привод ное храповое колесо и вспомогательное храповое колесо, расположенную на водиле
Гидроцилиндр 16 при рабочем ходе через серьгу 17 и ось 18 поворачивает водило 5 против часовой стрелки. При этом подающая собачка 6 поворачивает приводное 55 и подпружиненную к приводному храповому храповое колесо 2, а вместе с ним вал 4 и колесу подающую собачку, установленную ведущую звездочку 1, которая перемещает цепь 19 и столики 20 с деталями 21 на трена основании запирающую собачку, и привод водила, отличающийся тем, что, с целью по0
буемое расстояние. Вращение звездочки 1 продолжается до тех пор, пока зуб делительного диска 3 не встретится с подвижным упором 11, перемеш,ающимся ему навстречу в корпусе 12. Перемеш,ение упора 11 осуществляется тягой 13, кинематически связывающей водило 5 и упор 11 при помощи осей 14 и 15. В конце поворота приводного храпового колеса 2, запирающая собачка 8, смонтированная в неподвижном корпусе 10, под действием пружины 9 заскакивает во впадину храпового колеса 3. Запирающая собачка 8 требуется для того, чтобы при холостом ходе водила 5 от сил трения подающей собачки 6 о поверхность
зуба приводного храпового колеса 2 послед- нее не могло повернуться,
зуба приводного храпового колеса 2 послед- нее не могло повернуться,
Таким образом, звездочка 1 с валом 4 в состоянии покоя оказываются зафиксированными между упором 11 и собачками 6 и 8, а вместе с ними и цепь 19 со столиками 20 и изделиями 21. При обратном ходе гидроцилиндра 16 водило 5 вращается по часовой стрелке, при этом подающая собачка 6, перемещающаяся по криволинейной поверхности зуба приводного храпового колеса 2, сжимает пружину 7 и в конце хода водила 5 под действием этой же пружины заскакивает во впадину приводного храпового колеса 2. Одновременно при повороте водила 5 тяга 13 отводит упор 11 от делительного диска для возможности поворота
его при рабочем ходе водила 5. Положе- водила 5, тяги 13, подвижного упора
Данный механизм обеспечивает высокую точность деления, так как при повороте делительного диска подвижный упор, обеспечивающий фиксацию механизма в состоянии покоя, находится в отведенном от него положении, в результате чего не происходит износа поверхностей зубьев делительного диска и поверхности подвижного упора. Точность деления зависит только от точности изготовления делительного диска. Кроме того, обеспечивается возможность использования механизма, например, в конвейерах, имеющих больщие перемещающиеся массы.
Формула изобретения
1. Механизм для сообщения прерывисто- го движения тяговому органу, содержащий установленный на основании приводной вал, водило, смонтированные на приводном валу поворотный элемент тягового органа, привод ное храповое колесо и вспомогательное храповое колесо, расположенную на водиле
и подпружиненную к приводному храповому колесу подающую собачку, установленную
и подпружиненную к приводному храповому колесу подающую собачку, установленную
на основании запирающую собачку, и привод водила, отличающийся тем, что, с целью повышения точности останова и фиксации тягового органа, механизм снабжен установленным на основании с возможностью Бозвратно-ноступательного перемещения и взаимодействия с зубьями вспомогательного храпового колеса подвижным упором, шар- нирно связанным с водилом посредством тяги, причем запирающая собачка расположена с возможностью взаимодействия с
зубьями приводного храпового колеса, при этом водило свободно установлено на приводном валу, а профиль зубьев вспомогательного храпового колеса развернут на 180° по отнощению к профилю зубьев приводного храпового колеса.
2. Механизм по п. 1, отличающийся тем, что поворотный элемент тягового органа выполнен в виде приводной звездочки.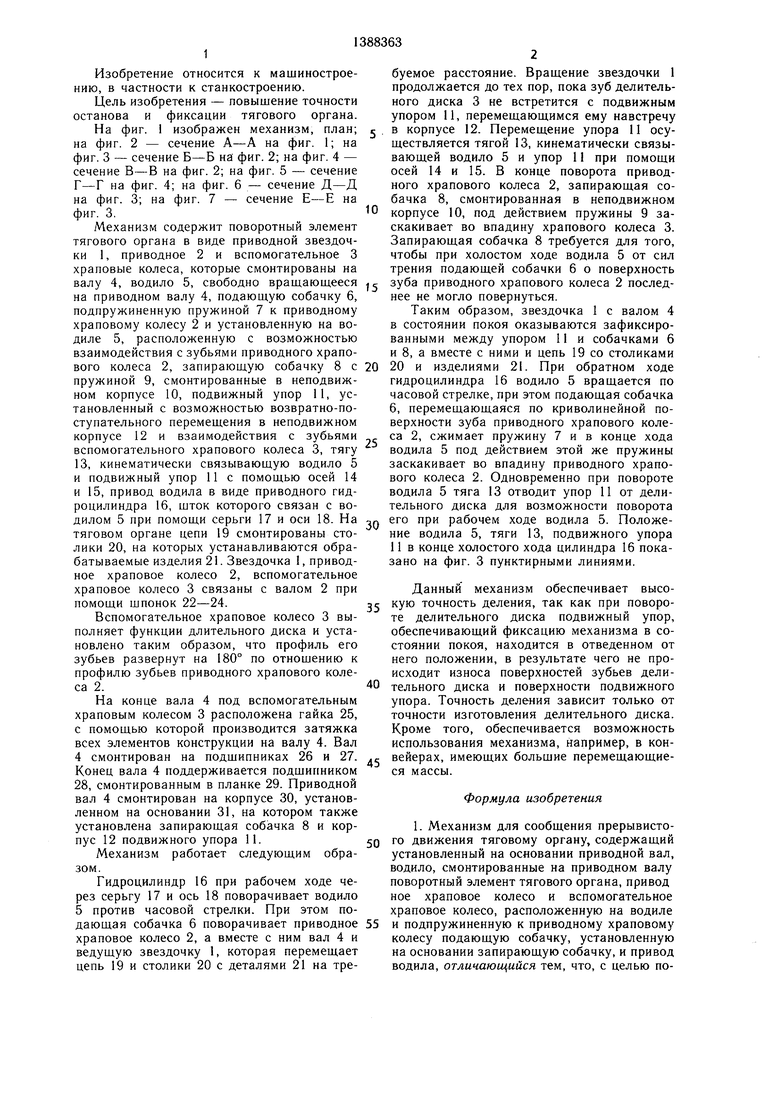
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод шаговых перемещений | 1990 |
|
SU1778048A1 |
| Устройство для шагового перемещения исполнительного органа установки для подачи материала в зону обработки | 1987 |
|
SU1433586A1 |
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ ПРОИЗВОДСТВА БАРАНОЧНЫХ ИЗДЕЛИЙ | 1965 |
|
SU214451A1 |
| Привод шагового конвейера | 1983 |
|
SU1093646A1 |
| МОСТОВОЙ КРАН | 1969 |
|
SU247482A1 |
| ПЕЧАТНО-ОТМЕТОЧНАЯ МАШИНА | 1968 |
|
SU210186A1 |
| Станок для механической обработки прямоугольных деталей из полимерных материалов | 1981 |
|
SU1002160A2 |
| Устройство для укладки штучныхиздЕлий B ТАРу | 1979 |
|
SU839866A1 |
| Установка для аргонодуговой сварки поворотных стыков труб неплавящимся электродом с подачей присадочной проволоки | 1990 |
|
SU1776528A1 |
| Делительное устройство | 1986 |
|
SU1437186A1 |
Изобретение относится к машиностроению и повышает точность останова и фиксации тягового органа. Механизм включает поворотный элемент тягового органа в виде 12 ш установленных на приводном валу приводной звездочки, приводного храпового колеса (ХК) 2 и вспомогательного ХК и установленную на водиле 5 собачку 6. Гидроцилиндр 16 через серьгу 17 и ось поворачивает водило 5. Собачка 6 поворачивает приводное ХК 2, вал и ведущую звездочку. Последняя перемещает цепь и столики с деталями. Вращение звездочки осуществляется до тех пор, пока зуб вспомогательного ХК не вступит во взаимодействие с подвижным упором 11. Перемещение упора производится тягой 13, кинематически связанной с водилом 5. Фиксация приводного ХК 2 производится запирающей собачкой 8. Профиль зубьев вспомогательного ХК 3 развернут на 180° по отношению к профилю зубьев ХК 2. 1. з.п. ф-лы, 7 ил. 6-е о: ос а а ОС О ОС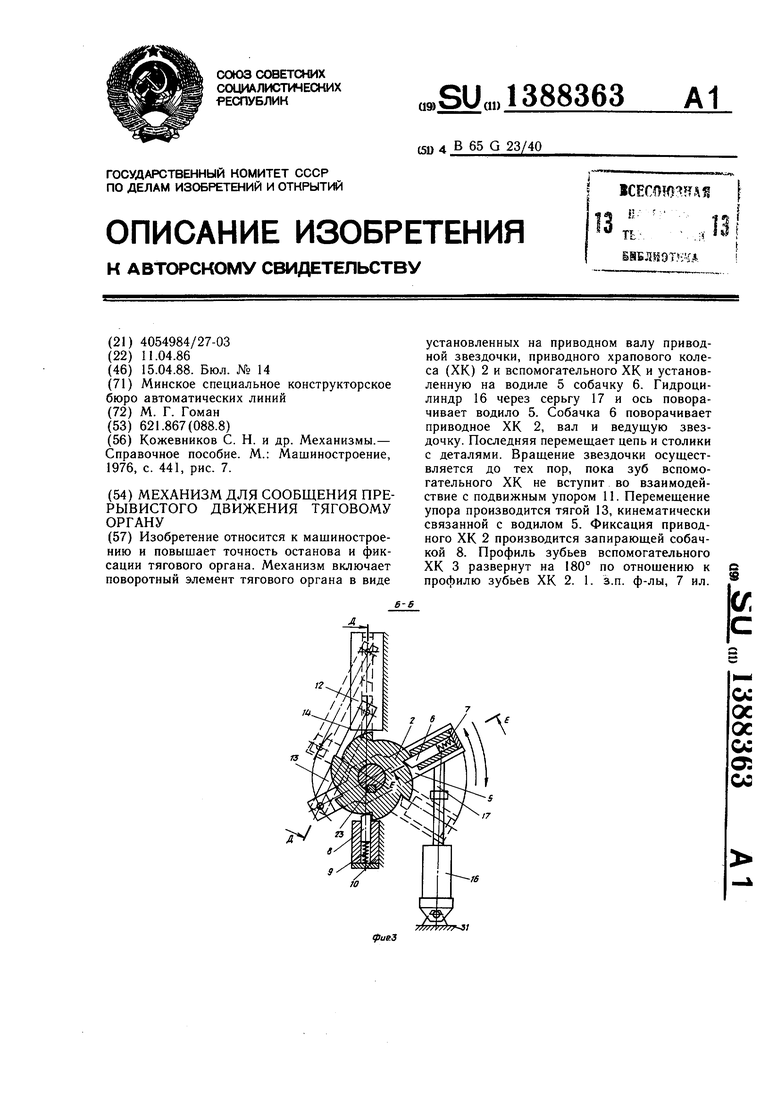
25
(pu9.2
фиеЛ
Д-Д (поберну/ло)
Составитель л. Расторгуева
Редактор М. Недолуженко Техред И. ВересКорректор Г. Решетник
Заказ 1520/25Тираж 787Подписное
ВНИИПИ Государственного комитета СССР по делам изобретеннй и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Г- Г
Фие.5
ФиъЛ
| Кожевников С | |||
| Н | |||
| и др | |||
| Механизмы.- Справочное пособие | |||
| М.: Машиностроение, 1976, с | |||
| Кинематографический аппарат | 1918 |
|
SU441A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
