Изобретение относится к измерительной технике, в частности к устройствам для измерения параметров ветровой волны, и может быть использовано, например, при метеорологических и океанографических исследованиях.
Целью изобретения является повышение точности за счет уменьшения влияния ошибок, обусловленных действием горизонтальных ускорений,
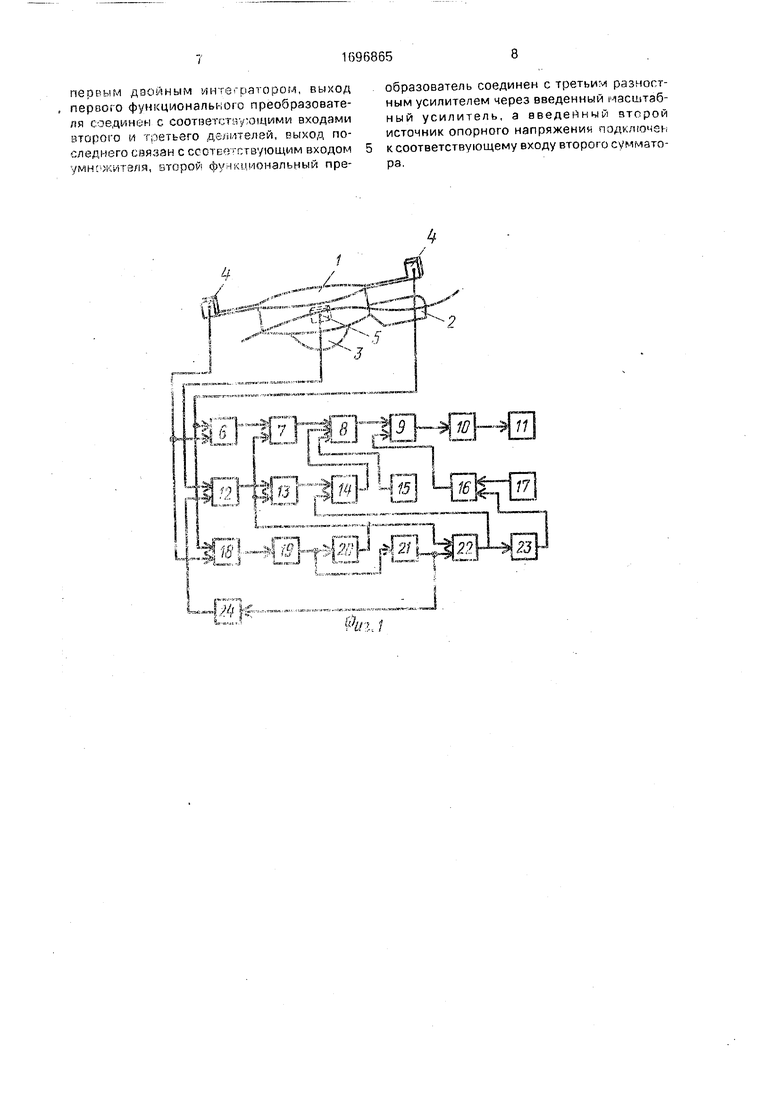
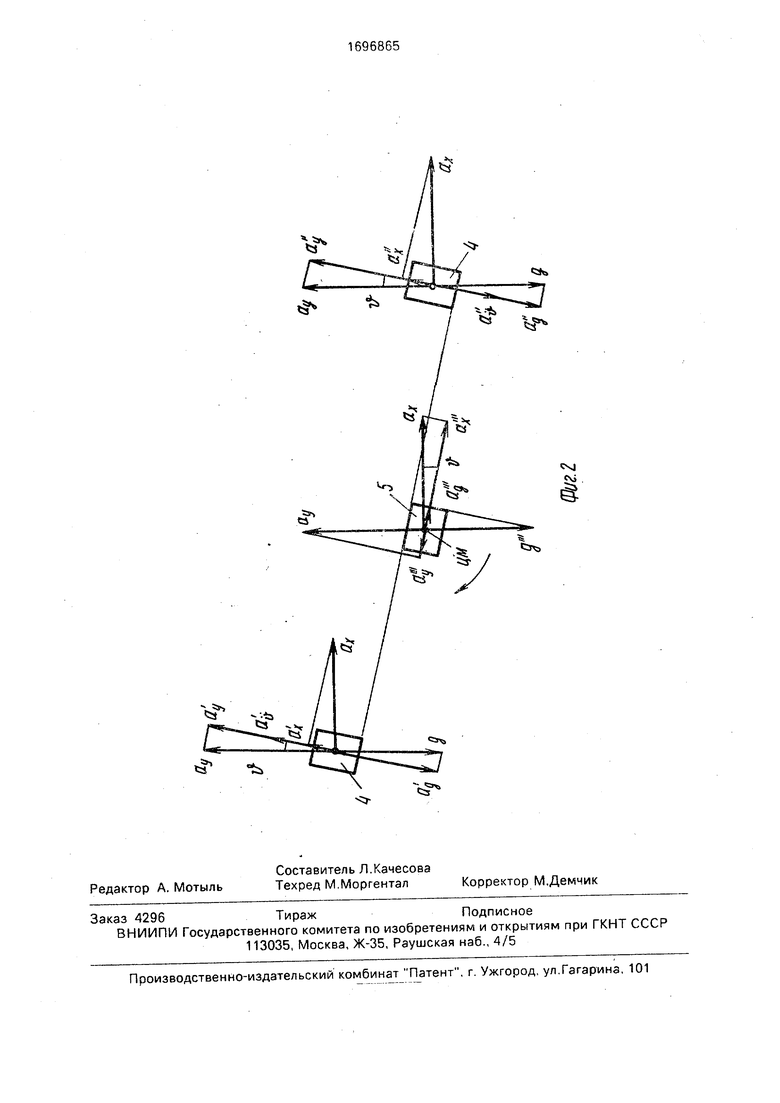
На фиг, 1 изображен предлагаемый волнограф и приведена структурная схема обработки информативных сигналов; на фиг, 2 - схема составляющих ускорений.
На фиг. 1 обозначено: 1 - поплавок, 2 - флюгер. 3 - груз, 4 - вертикально ориентированные акселерометры, 5 - горизонтально ориентированный акселерометр, 6 - первый сумматор, 7 - первый делитель, 8 - первый разностный усилитель, 9 - четвертый делитель, 10- первый двойной интегратор, 11 - регистратор, 12 -третий разностный усилитель, 13 - второй делитель, 14 - умножитель, 15-первый источник опорного напряжения, 16 - второй сумматор, 17 - второй источник опорного напряжения, 18 - второй разностный усилитель, 19 - второй двойной интегратор, 20 и 21 - первый и второй функциональные преобразователи, 22 - третий делитель, 23 - квадратор, 24 - масштабный усилитель.
Поплавок 1 жестко связан с ориентированными взаимно перпендикулярно акселерометрами 4 и 5, а также с флюгерам 2 и грузом 3. Выходы акселерометров 4 связаны с входами сумматора 6 и первого разностного усилителя 18. Выход первого разностного усилителя 18 через первый двойной интегратор 19 и первый функциональный преобразователь 20 связан с первым входом
О
ю
00
о
первого делителя 7, а с вторым его входом связан выходом сумматора 6. Выход делителя 7 и выход первого источника 15 опорного напряжения соединень через второй разностный усилитель 8, второй делитель 9 и второй двойной ин I егратор 10 с регистратором 11 профиля волнения. Выход первого двойного интегратора 19 через второй функциональный преобразователь 21 соединен с первым входом четвертого делителя 22, а с вторым его входом соединен выход первого функционального преобразователя 20. Выход делителя 22 соединен с входом умножителя 14 непосредственно и через кзздратор 23 с входом второго сумматора 16, второй вход которого соединен с вторым источником 17 опорного напряжений. Выход второго сумматора 16 связан с вторым входом второго делителя 9. Выход третьем акселерометра 5 соединен с третьим входом второго разност- ного усилителя 8 через последовательно соединенные третий разгостный усилитель 12, третий делитель 13 и умножитель 14. Выход второго функционального преобразователя 21 соединен с вторым входом третьего раз- постного усилителя 12 через масштабный усилитель 24, а аыход первого функционального преобразоазтепя 20 соединен с вторым входом третьего делителя 13.
Интегральный волнограф работает еле- дующим образов.
При ветровом волнении вся измерительная система ориентируется гдким образом, что ос1 Алюгера становится параллепьно направлению распространения полны. Нал и- чие груза 3 обеспечиваетустойчивость конструкции и уменьшает ее горизонтальные перемещение. Поплаоок 1 жестко связан с двумя вертикально ориентированными акселерометрами 4, которые разнесены от него на одинаковое расстояние в ппоскости флюгера 2. Третий акселеромет р 5, закрепленный в центре масс, ориентирован горизонтально походу распространения волн.
Акселерометры 4 выдают сигналы, включающие следующие составляющие (см. фиг. 2):
первый акселерометр
составляющая от вертикального ускорения ву ау созг(например,с полохитель- ным знаком):
-составляющая от ускорения свободного падения ag a g cosv (например, с отрицательным знаком);
- составляющая от горизонтального ус- корения ах a/sinv (например, с положительным знаком);
( - составляющая от углового ускорения av , где Li- расстояние о г центра масс
обьекта до первого акселерометра (например, с положительным знаком), второй акселерометр
-составляющая от вертикального ускорения ay aycosv (соответственно с положительным знаком);
-составляющая от ускорения свободного падения ag gcos v (соответственчо с отрицательным знаком),
-составляющая от горизонтального ускорения ах - ayslrvv {соответственно с положительным знаком);
,, - составляющая от углового ускорения , где LI - расстояние от центра масс до второго акселерометра (в соответствии с отрицательным знаком).
Сигнал с акселерометра 5 содержит следующие составляющие:
-составляющая от горизонтального ускорения ах axcosv (соответственно с положительным знаком);
-составляющая от вертикального ускорения ay aysinv (соответственно с отрицательным знаком);
-составляющая от ускорения свободного падения ag gslrvv (соответственно с положительным знаком).
Таким образом, сигналы акселерометра 4 и 5 могут быть описаны следующими выражениями:
3,; aycos v - gcos v + axsin v + i Li, a aycos v - gcos v + axsln v - v L.2, a - axcos v - aysin v + gstnv, Если акселерометры идентичны и расстояние от центра масс до акселерометров 4 равны Li La L, тогда суммарный сигнал с двух акселерометров А, формируемый сумматором 6 (с коэффициентом передачи 1 /2), может быть описан выражением а + а (ау -.g)cos v+- axsin v . Разностный сигнал акселерометров 4, формируемый разностным усилителем 18, имеющим коэффициент передачи 1/2, в этом случае запишется в виде
а-а Lv,
причем коэффициент L определяет чувствительность устройства по угловому ускорению.
Для получения информации по углу vcnmafl с разностного усилителя 18 необходимо дважды проинтегрировать. Таким образом, выходной сигнал интегратора 19 пропорционален углу V , который функциональные преобразователи 20 и 21 преобразуют в соответствии с функциями косинуса cos v и синуса sin v соответственно. Деление сигнала с сумматора б на сигнал с фун- щионапьного преобразователя 20
происходит в делителе 7, выходной сигнал которого может быть записан в виде
U ау - g 4 axtg v .
Сигнал с функционального преобразователя 21, пропорциональный синусу угла наклона, через масштабный усилитель 24 с коэффициентом усиления, равным ускорению свободного падения, поступает на один из входов разностного усилителя 12, на второй вход которого подается сигнал с акселерометра 5. Таким образом компенсируется составляющая от ускорения свободного падения в сигнал с горизонтально расположенного акселерометра 5. Сигнал с разностного усилителя 12 будет пропорционален величине
Ui2 axcosv -aysim.
В делителе 13 происходит деление сигнала с разностного усилителя 12 на сигнал, пропорциональный косинусу угла наклона с функционального преобразователя 20:
Ui3 ax-aytgv .
После этого сигнал с делителя 13 поступает на один из входов умножителя 14.
В делителе 22 производится деление сигналов с функциональных преобразовате- лей 20 и 21, пропорциональных соответственно косинусу и синусу угла наклона так, что выходной сигнал делителя 22 пропорционален тангенсу угла наклона. Далее этот сигнал подается на вход квадратора 23 и на второй вход умножителя 14. выходной сигнал с которого описывается формулой
Ui4 axtg -aytg2v.
Вычитание сигнала, пропорционального ускорению свободного падения с источ- ника 15 опорного напряжения, и сигнала с умножителя 14 из сигнала с делителя 7 производится разностным усилителем 8. Его выходной сигнал будет пропорционален величине
U8;-ay(1 +tg2V).
Для устранения влияния на полученный сигнал угла наклона v в сумматоре 16 производится сложение сигналов, поступающих с квадратора 23 и с источника опорного напряжения, пропорциональных квадрату тангенса угла наклона v и единичному сигналу. В этом случае суммарный сигнал, подаваемый на один из входов делителя 9 с сумматора 16, будет иметь вид
U16-1 + tg2v.
На второй вход делителя 9 подается сигнал с разностного усилителя 8. Сигнал с делителя 9. пропорциональный вертикальному ускорению поплавка, дважды интегрируется в интеграторе 10 и регистрируется в регистраторе 11.
В качестве акселерометров могут быть использованы датчики типа ДЛУММ (датчик линейных ускорений микроминиатюрный).
Источники опорного напряжения, разностные усилители и сумматоры могут быть выполнены на базе серийных операционных усилителей серии 140; умножитель, квадратор, масштабный усилитель и делители на базе микросхем серии 525; интеграторы могут быть выполнены, например, с частотно-зависимыми обратными связями, позволяющими производить интегрирование в заданном диапазоне частот; функциональные преобразователи могут быть выполнены, например, на базе аналого-цифрового преобразователя 572ПВ1, постоянного запоминающего устройства 568РЕ1 и цифроаналогового преобразователя 572ПА2. В качестве регистратора может быть использован шлейфовый осциллограф, матитный накопитель и др.
При использовании инерциального волнографа обеспечиваются необходимая точность, достоверность и информативность современных метеорологических и океанографических исследований.
Формула изобретения
Инерциальный вопнограф. содержащий поплавок с грузом и флюгером, первый и второй вертикальные акселерометры, расположенные в плоскости флюгера и разнесенные на равные расстояния относительно центра масс устройства, первый источник опорного напряжения, связанный через первый разностный усилитель и первый двойной интегратор с регистратором, второй разностный усилитель, входами подключенный к первому и второму вертикальным акселерометрам, а выходом через второй двойной интегратор, первый функциональный преобразователь и первый делитель - к входу первого разностного усилителя, и первый сумматор, включенный между первым и вторым вертикальными акселерометрами и первым делителем, о т- личающийся тем, что, с целью повышения точности за счет уменьшения влияния ошибок, обусловленных действием горизонтальных ускорений, он снабжен последовательно соединенными горизонтальным акселерометром, расположенным в центре масс устройства, третьим разностным усилителем, вторым делителем и умножителем, подключенным к соответствующему входу первого разностного усилителя, выполненного трехвходовым, последовательно соединенными вторым функциональным преобразователем, подключенным к выходу второго двойного интегратора, третьим делителем, квадратором, вторым сумматором и четвертым делителем, через который осуществлена связь первого разностного усилителя с
первым двойным интегратором, выход первого функционального преобразователя соединен с соответствующими входами второго и третьего делителей, выход последнего связан с соответствующим входом умнехителя, второй функциональный преобразователь соединен с третьим разностным усилителем через введенный масштзб- ный усилитель, а введейнмй второй источник опорного напряжения подключен к соответствующему входу второго сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения частоты и амплитуды морских ветровых волн | 1991 |
|
SU1812429A1 |
| Волнограф | 1987 |
|
SU1613861A1 |
| Устройство для измерения рельефа местности | 1986 |
|
SU1530897A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ САМОЛЕТА | 2003 |
|
RU2240507C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ СМЕЩЕНИЯ ЦЕНТРА МАСС АППАРАТА | 2000 |
|
RU2176810C2 |
| СПОСОБ ИЗМЕРЕНИЯ СВЕРХМАЛОЙ ВЫСОТЫ ПОЛЕТА САМОЛЕТА ПРЕИМУЩЕСТВЕННО ГИДРОСАМОЛЕТА, НАД ВОДНОЙ ПОВЕРХНОСТЬЮ И ПАРАМЕТРОВ МОРСКОГО ВОЛНЕНИЯ | 2014 |
|
RU2557999C1 |
| ОДНОКАНАЛЬНАЯ МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 1997 |
|
RU2108595C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИСТОЧНИКОВ АТМОСФЕРИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2112251C1 |
| ДЕМОДУЛЯТОР ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2008 |
|
RU2393641C1 |
| УСТРОЙСТВО ДЛЯ ПОЛЕТНОГО КОНТРОЛЯ ВЕСА НАГРУЗКИ САМОЛЕТА | 2003 |
|
RU2260179C1 |
Изобретение относится к измерительной технике и позволяет повысить точность регистрации профиля волнения на водной поверхности при метеорологических и океанографических исследованиях. Цель повышение точности. Цель достигается за счет коррекции сигнала, пропорционального вертикальному ускорению поплавка, плавающего на водной поверхности. Для выдапения информации и осуществления коррекции сигнала испопьзуются два вертикально направленных, разнесенных на одинаковое расстояние от центра масс поплавка акселерометра 4 и ориентированный перпендикулярно к ним третий акселерометр, закрепленный в центре масс поплавка. Акселерометры соединены со схемой обработки и выделения информативного сигнала, что позволяет проводить компенсацию составляющих погрешности измерения профиля волнения, возникающих в результате наклонов поплавка и его горизонтальных ускорений. 2 ил.
Фиг. 1
«а
«41 o
| Патент США № 4515013, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Волнограф | 1987 |
|
SU1613861A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
