Ч1Н
со 00
О5
;о со
J
Изобретение относится к области автоматизации сельскохозяйственных мобильных агрегатов.
Цель изобретения - повышение точности автоматического вождения сельскохозяйственных мобильных агрегатов при установившихся возмущающих воздействиях,
На чертеже представлена функциональная схема системы автоматического вождения сельскохозяйственного мобильного агрегата с регулированием по возмущению.
Система состоит из двух контуров регулирования.
Первый - основной контур регулирования по отклонению регулируемой велиВыходная величина а исполнительного элемента 4 поступает также на элемент 7 сравнения, выход которого (а+а) преобразуется преобразующим элементом 8 в электрис ческий сигнал стабилизации Ьт, равный по величине сигналу рассогласования I. В элементе 9 сравнения из сигнала рассогласования I вычитается сигнал стабилизации Ьт. Поэтому при наличии сигнала рассогласования I с элемента 9 сравнения на вход
0 преобразующего элемента 3 сигнал не поступает ( 0).
После ликвидации рассогласования, т.е. при , с элемента 9 сравнения на преобчины - состоит из элемента 1 сравнения, г разующий элемент 3 поступает сигнал ста- представляющего собой копирующий щуп,билизации Ьт противоположного знака, при
преобразующего элемента 2, представляющего собой трехпозиционный датчик сигнала рассогласования, преобразующего элемента 3, представляющего собой электрогидравлический золотник, исполнительного элемента 4, представляющего собой гидравлический сервомотор руля, объекта 5 управления (мобильный агрегат) и обратной связи 6.
этом управляемые колеса поворачиваются в нейтральное положение. При угле поворота колес ос, равном нулю, сигнал стабилизации Ьт прекращается и колеса остаются в нейт- 20 ральном положении до появления следующего сигнала рассогласования Ь Сигнал рассогласования I одновременно с основным контуром регулирования поступает также на элемент 10 сравнения дополнительного контура регулирования по возмущению. А так как длительность сигнала рассогласования i от случайного возмущения не превышает установленной задатчиком 11 длительности сигнала задатчика Ь, величина
30
Второй - дополнительный контур регули- рования по возмущению - состоит из элемента 7 сравнения, выполненного аналогично датчику сигнала рассогласования, ось которого имеет механическую связь с поворотным валом рулевого механизма и с преобразующим элементом 8, представляющим собой электрический переключатель, элемента 9 сравнения, выполненного в виде транзисторного ключа, элемента 10 сравнения релейного типа, электрически связанного с задатчиком 11, и преобразующего эле- .,- мента 12, представляющего собой реверсивный электродвигатель, вал которого связан с подстроечным механизмом элемента 7 сравнения.
В случае действия на мобильный агрегат
этом управляемые колеса поворачиваются в нейтральное положение. При угле поворота колес ос, равном нулю, сигнал стабилизации Ьт прекращается и колеса остаются в нейт- 20 ральном положении до появления следующего сигнала рассогласования Ь Сигнал рассогласования I одновременно с основным контуром регулирования поступает также на элемент 10 сравнения дополнительного контура регулирования по возмущению. А так как длительность сигнала рассогласования i от случайного возмущения не превышает установленной задатчиком 11 длительности сигнала задатчика Ь, величина
которого равна сигналу ошибки, имеющему место при случайных возмущениях, то выходная величина элемента 10 сравнения (I - 1з) и, cooтвeтcтвeннo выxoднaя величина преобразующего элемента 12 (ocj равны нулю.
В этом случае нулевое положение элемента 7 сравнения соответствует нейтральному положению управляемых колес, совпадающему с продольной осью агрегата.
В случае действия на агрегат установившегося возмущения, например асиммет45
случайного возмущения отклонение точки ко- 40 рия крюковой нагрузки, поперечных укло- пирования от заданной траектории (Ьх) измеряется элементом 1 сравнения, угловое отключение которого от среднего положения преобразуется преобразующим элементом 2 в электрический сигнал рассогласования I, поступающий одновременно в дополнительный контур регулирования на элементы 9 и 10 сравнения и в основной контур регулирования на вход преобразующего элемента 3, в котором преобразуется в механическое перемещение Я гидрозолотника.
В исполнительном элементе 4 перемещение золотника преобразуется в поворот управляемых колес на некоторый угол а, в сторону ликвидации отклонения от заданной траектории, который является входом объекта 5 управления. С объекта 5 управления выходная величина Ьы.х через обратную связь 6 поступает на элемент 1 сравнения.
нов и др., на элемент 10 сравнения поступает сигнал рассогласования I определенного знака, длительность которого, в данном случае, превышает длительность сигнала Ь задатчика 11. В элементе 10 сравнения из сигнала рассогласования вычитается сигнал задатчика 11. Разность этих сигналов (I-1з) преобразуется преобразующим элементом 12 во вращение вала электродвигателя на угол коррекции «к, который
cQ в элементе 7 сравнения суммируется с углом поворота колес ос. Эта сумма углов (а+ак) преобразуется преобразующим элементом 8 в электрический сигнал Ь-т, который поступает на элемент 9 сравнения. Пока имеется сигнал рассогласования I, выходная величи55 на элемента 9 сравнения равна нулю (Ьт-1 0). Как только прекращается управляющее воздействие, т.е. когда сигнал рассогласования I равен нулю, с элемента
Выходная величина а исполнительного элемента 4 поступает также на элемент 7 сравнения, выход которого (а+а) преобразуется преобразующим элементом 8 в электрический сигнал стабилизации Ьт, равный по величине сигналу рассогласования I. В элементе 9 сравнения из сигнала рассогласования I вычитается сигнал стабилизации Ьт. Поэтому при наличии сигнала рассогласования I с элемента 9 сравнения на вход
преобразующего элемента 3 сигнал не поступает ( 0).
этом управляемые колеса поворачиваются в нейтральное положение. При угле поворота колес ос, равном нулю, сигнал стабилизации Ьт прекращается и колеса остаются в нейт- ральном положении до появления следующего сигнала рассогласования Ь Сигнал рассогласования I одновременно с основным контуром регулирования поступает также на элемент 10 сравнения дополнительного контура регулирования по возмущению. А так как длительность сигнала рассогласования i от случайного возмущения не превышает установленной задатчиком 11 длительности сигнала задатчика Ь, величина
которого равна сигналу ошибки, имеющему место при случайных возмущениях, то выходная величина элемента 10 сравнения (I - 1з) и, cooтвeтcтвeннo выxoднaя величина преобразующего элемента 12 (ocj равны нулю.
В этом случае нулевое положение элемента 7 сравнения соответствует нейтральному положению управляемых колес, совпадающему с продольной осью агрегата.
В случае действия на агрегат установившегося возмущения, например асимметрия крюковой нагрузки, поперечных укло-
рия крюковой нагрузки, поперечных укло-
нов и др., на элемент 10 сравнения поступает сигнал рассогласования I определенного знака, длительность которого, в данном случае, превышает длительность сигнала Ь задатчика 11. В элементе 10 сравнения из сигнала рассогласования вычитается сигнал задатчика 11. Разность этих сигналов (I-1з) преобразуется преобразующим элементом 12 во вращение вала электродвигателя на угол коррекции «к, который
в элементе 7 сравнения суммируется с углом поворота колес ос. Эта сумма углов (а+ак) преобразуется преобразующим элементом 8 в электрический сигнал Ь-т, который поступает на элемент 9 сравнения. Пока имеется сигнал рассогласования I, выходная величина элемента 9 сравнения равна нулю (Ьт-1 0). Как только прекращается управляющее воздействие, т.е. когда сигнал рассогласования I равен нулю, с элемента
9 сравнения на вход преобразующего элемента 3 поступает электри еский сигнал противоположного знака (-ICT ), который преобразующим элементом 3 и исполнительным элементом 4 преобразуется в поворот управ- ляемых колес в нейтральное положение. При этом колеса будут поворачиваться до тех пор пока выходная величина элемента 7 сравнения не станет равной нулю (о( 0). При нулевом значении выхода элемента 7 сравнения сигнал на выходе элемента 9 сравнения прекращается и управляемые колеса занимают новое нейтральное положение, смещенное от продольной оси мобильного агрегата на угол коррекции а«, который создает восстанавливающий момент, нейтрализующий действие на агрегат установивще- гося возмущения.
Формула изобретения
Способ автоматического вождения сель- скохозяйственных мобильных агрегатов со
стабилизацией управляемых колес в нейтральном положении, включающий контроль отклонения от заданной траектории и выдачу команды на поворот управляемых колес после выключения механизма стабилизации, отличающийся тем, что, с целью повышения точности автоматического вождения путем устранения влияния уст-ановив- щегося возмущения, дополнительно сравнивается длительность сигналов рассогласования разных знаков и в случае превышения длительности сигнала одного из знаков, создаваемого установившимся возмущением над длительностью сигнала ошибки, имеющего место при случайных возмущениях, производится смещение нейтрали механизма стабилизации управляемых колес на определенную величину и соответственно поворот колес на некоторый угол, создающий восстанавливающий момент и являющийся новым нулевым положением колес, относительно которого отрабатываются сигналы ощибки.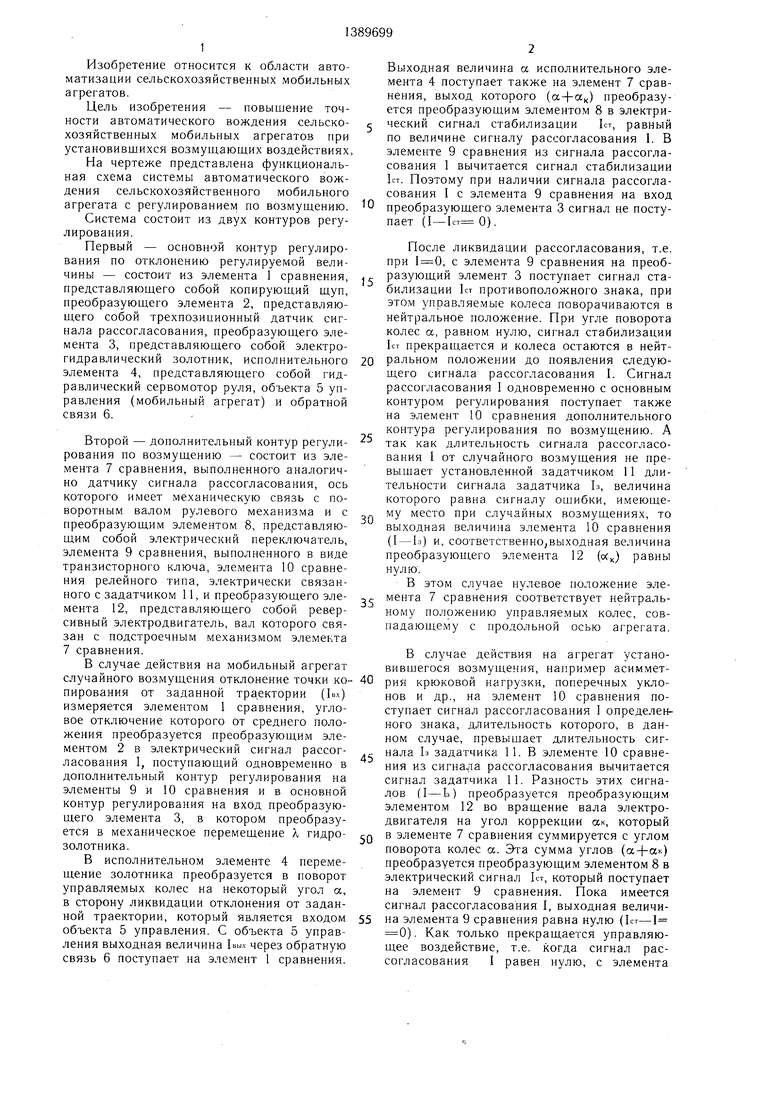
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ МОБИЛЬНЫХ АГРЕГАТОВ | 2001 |
|
RU2224396C2 |
| Способ управления мобильным агророботом | 1986 |
|
SU1393334A1 |
| Регулятор мощности дуговой многофазной электропечи | 1986 |
|
SU1399897A1 |
| СПОСОБ ТЕРМООБРАБОТКИ СВАРНЫХ ШВОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2384632C2 |
| Устройство автоматического вождения сельскохозяйственного агрегата | 1982 |
|
SU1042638A1 |
| Устройство для вождения колесного машинно-тракторного агрегата на рабочем гоне и поворотной полосе | 1980 |
|
SU934942A1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНТЕГРАЛЬНОГО СИГНАЛА СТАБИЛИЗАЦИИ ПЛАНИРУЮЩЕГО ДВИЖЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2459744C1 |
| Устройство для регулирования температуры | 1985 |
|
SU1295376A1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНТЕГРАЛЬНОГО АДАПТИВНОГО СИГНАЛА СТАБИЛИЗАЦИИ ПЛАНИРУЮЩЕГО ДВИЖЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2460113C1 |
| Способ управления агророботом | 1987 |
|
SU1556557A1 |
Изобретение касается автоматизации сельскохозяйственных мобильных агрегатов. Целью изобретения является повышение точности автоматического вождения путем устранения влияния установившегося возмущения. Сравнивают длительность сигналов рассогласования разных знаков. В случае превышения длительности сигнала одного из знаков, создаваемого установившимся возмуш,ением, над длительностью сигнала ошибки, имеющего место при случайных возмущениях, производят смещение нейтрали механизма стабилизации управляемых колес на определенную величину и соответственно поворот колее на некоторый угол, создающий восстанавливающий момент и являющийся новым нулевым положением колес, относительно которого отрабатываются сигналы ошибки. Для осуществления способа система содержит два контура регулирования. Ос новной контур регулирования состоит из элемента сравнения (ЭС) 1, преобразующего элемента 2, преобразующего элемента 3, исполнительного элемента 4, объекта управления 5 и обратной связи 6. Дополнительный контур регулирования состоит из ЭС 7, ось которого имеет механическую связь с поворотным валом рулевого механизма и с преобразующим элементом 8, ЭС 9, ЭС 10 релейного типа, электрически связанного с задатчиком 11, и преобразующего элемента 12, вал которого связан с подстроечным механизмом ЭС 7. 1 ил. (О (Л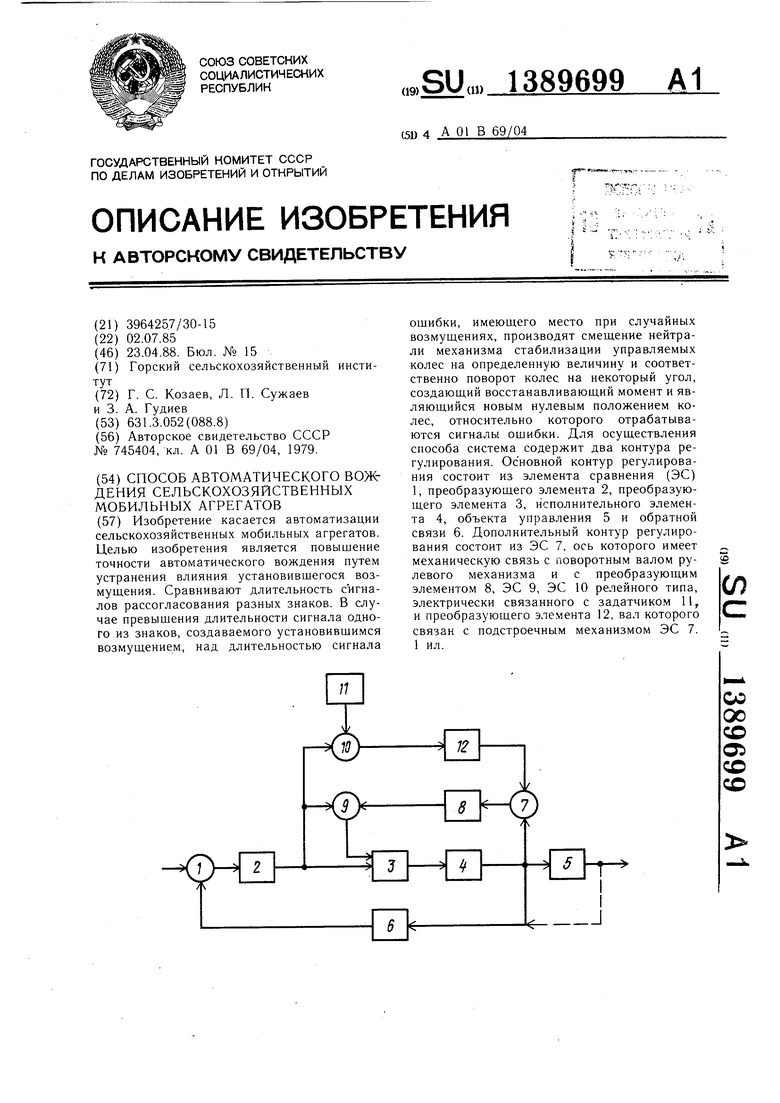
| Способ автоматического вождения колесных тракторов и устройство для его осуществления | 1979 |
|
SU745404A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
