7
15
Ю
12
СО СО
о
нЙь
1
Изобретение относится к устройствам и приспособлениям для захвата, транспортировки и отдела грузов и может быть использовано при погрузке, транспортировке и разгрузке труб.
Цель изобретения - повышение надежности.
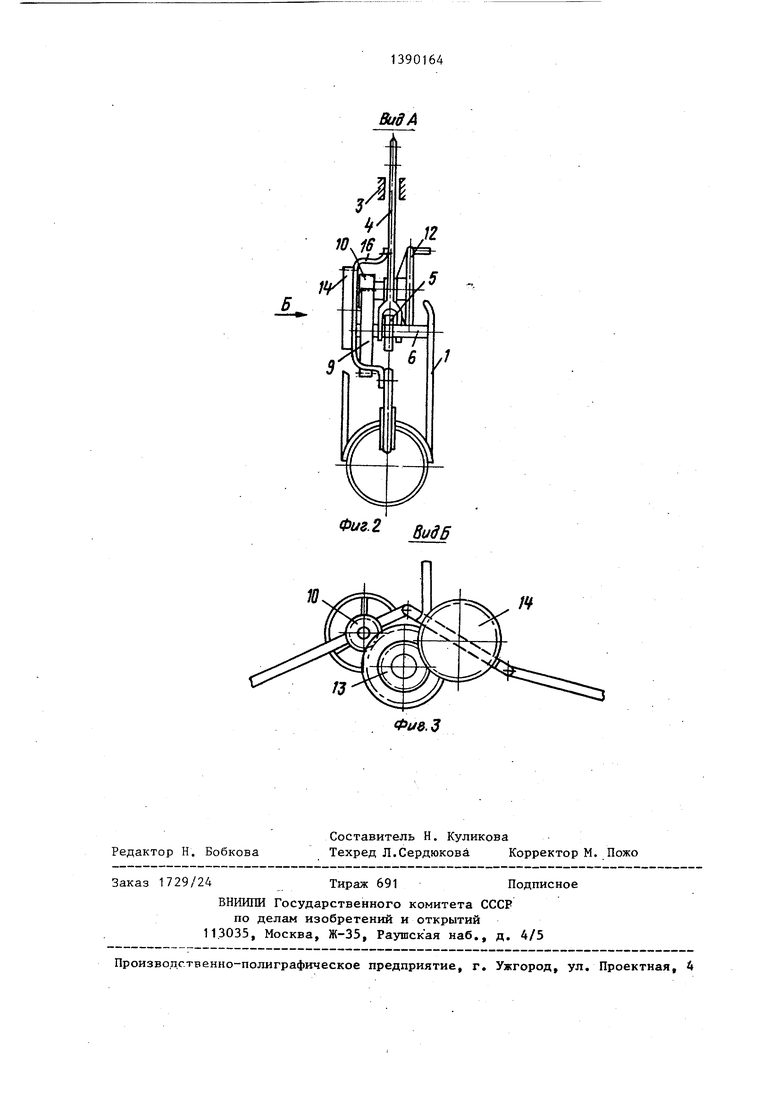
На фиг. 1 изображен захват в ис ходном положении (перед захватом трбы) , на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 2 (зацепление малого колеса блок-шестерни с зубчатым колесом кривошипа).
Автоматический захват для труб состоит из несущей рамы 1, соединенной жестко в нижней части с направляющим желобом 2 и имеющей в верхней части окно 3, через которое проходит вертикальный стержень 4 с проушиной, шарнирно соединенный с двуплечим рычагом 5, имеющим зубчатый сектор, который посредством оси 6 шарнирно прикреплен к раме 1 Зубчатый сектор рычага 5 взаимодействует с маль1м зубчатым колесом 7, сидящим на одной оси 8 с большим зубчатым колесом 9 и жестко с ним скрепленным. Большое зубчатое колесо 9 взаимодействует с другим малым зубчатым колесом 10, сидящим на одной оси 11 с маховиком 12, а малое колесо 13 блока-шестерни взаимодействует с большим зубчатым колесом 1 сидящим на одной оси 15 с кривошипо 16, передающим тяговое усилие при пмощи жестких тяг 17 на захватные рычаги 18.
Автоматический захват для труб р ботает следующим образом.
При оп-ускании траверсы на груз (трубу) стержень-тяга 4, за который захват подвешивается на крюк грузоподъемной машины, давит на рычаг 5 с зубчатым сектором, который, взаи
0
0
модействует с малым зубчатым колесом 7, передает вращательное движение через большое зубчатое колесо 9 на малое зубчатое колесо 10 маховика 12, приводя его во вращательное движение. В это же время зубчатый сектор рычага 5 выходит из зацепления с малым колесом 7, -вся система привода приходит во вращательное движение под действием силы инерции маховика 12. Одновременно от другого малого колеса 13 приводится во вращение большое зубчатое колесо 14, сидящее на одной оси 15 с кривошипом 16 и жестко с ним скрепленное Кривошип 16, вращаясь, посредством жестких тяг 17 приводит в возвратно-поступательное движение в горизонтальном направлении захватные рычаги 18, обеспечивая таким образом зажим трубы. При отцепе трубы операции производятся в обратном порядке.
25 Формула изобретения
д
Автоматический захват для труб, содержащий несущую раму и установленный подвижно на раме вертикальный стержень с проушиной для навешивания на крюк крана, захватные рычаги и привод их поворота в вертикальной плоскости, отличающийся тем, что, с целью повышения надежности, привод поворота захватных рычагов включает в себя присоединенный к нижнему концу вертикального стержня рычаг с зубчатым сектором на одном плече, кинематически связанный с зубчатым сектором двухступенчатый редуктор, размещенный на выходном валу одной ступени редуктора маховик, размещенный на валу второй ступени редуктора кривошип .и связанные од0
5
45
ними концами с последним, а другими
с захватными рычагами тяги.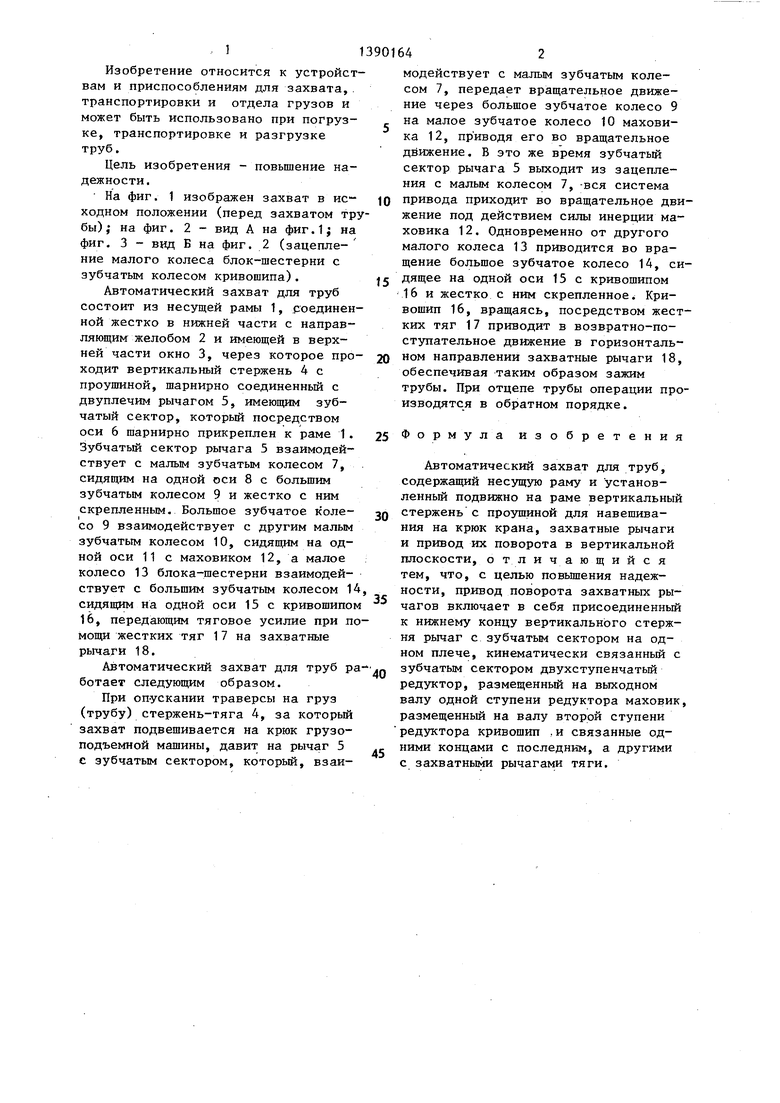
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ КОНТЕЙНЕРОВ | 2003 |
|
RU2288885C2 |
| МНОГОПИЛЬНАЯ УСТАНОВКА ДЛЯ ПОПЕРЕЧНОЙ РАСПИЛОВКИ БРЕВЕН | 1967 |
|
SU204523A1 |
| Делительная машина | 1958 |
|
SU118618A1 |
| Многопозиционный автомат для холодной объемной штамповки изделий | 1986 |
|
SU1424930A1 |
| Устройство к ткацкому станку для смены цвета уточных нитей | 1969 |
|
SU269801A1 |
| Чертежный прибор а.п.четверткова | 1974 |
|
SU662378A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ КОНТЕЙНЕРОВ С ФИТИНГАМИ | 2005 |
|
RU2291100C1 |
| ОЕОС-ОЗМАЯ .,|ПДТ1|;ТНО"Ил:;г;Е1;КДя|ВИБЛИОТЕКА | 1971 |
|
SU304214A1 |
| Штабелирующая тележка | 1941 |
|
SU83996A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ПОДЪЕМА И ОПУСКАНИЯ КОРПУСОВ ПЛУГА | 1926 |
|
SU7078A1 |
Изобретение относится к подъемно-транспортному машиностроению. Цель изобретения - повышение надежности. Автоматический захват для труб содержит несущую раму 1. На раме 1 установлен подвижно стержень 4 с проушиной. Захватные рычаги 18 приводятся в действие приводом, включающим в себя прикрепленньй к стержню 4 рычаг 5 с зубчатым сектором. С зубчатым сектором находится в зацеплении зубчатое колесо 7 двухступенчатого редуктора, на валу которого закреплен маховик 12. На втором валу редуктора закреплен кривошип 16, связанный посредством тяг с захватными рычагами 18. 3 ил. SS (Л
Фиг. 2
Видб
/
Фи&.З
| Вайнсон А.А и Андреева А.Ф | |||
| Крановые грузохватные устройства | |||
| - М., 1982, с | |||
| Переносный кухонный очаг | 1919 |
|
SU180A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
