1
Изобретение относится к грузозахватным устройствам и может применяться для транспортировки плоски грузов, например стальных листов и т.п. изделий.
Известен вакуумный захват, содержащий навешиваеглый на крюк крана позун с поршнем, подвижно установленHto4 а корпусе, подпоршневая полость которого имеет уплотнительную манжету и канал для сообщения с атмосферой, и механ1азм фиксации ползуна относительно корпуса 1,
Недостатки указанного захвата заключаются в сложности конструкции , большой номенклатуре деталей и низкой надежности его в работе вследствие наличия в конструкции захвата таких элементов, как например резиновый колпак клапана канала изготовление которого требует специальной оснастки. Гарантировать герметичность соединения колпака с поршнем и caTvioro колпака при многократном взаимодействии с грузом нельзя, пружины клапана при наличии шнтенсивного - соударения витков - также ненадежный элемент в механизме управления и др.
Цель изобретения - повышение надежности работы захвата.
Указанная цель достигается тем, что захват имеет установлеиную на верхней наружной поверхности поршня крышку с вырезом, воответствующим сечению ползуна, в поршне выполнена полость с выступами на боковой поверхности,
0 нижний конец ползуна подвижно установлен в отверстии крьшки и полости поршня и имеет упоры, взаимодействующие с выступами, при этом канал для сообщения подпоршневой полости
5 с атмосферой выполнен в одном из выступов.
Кроме того, захват снабжен ограничителем хода поршня, установленным Е нижней части подпоршневой
0 полости.
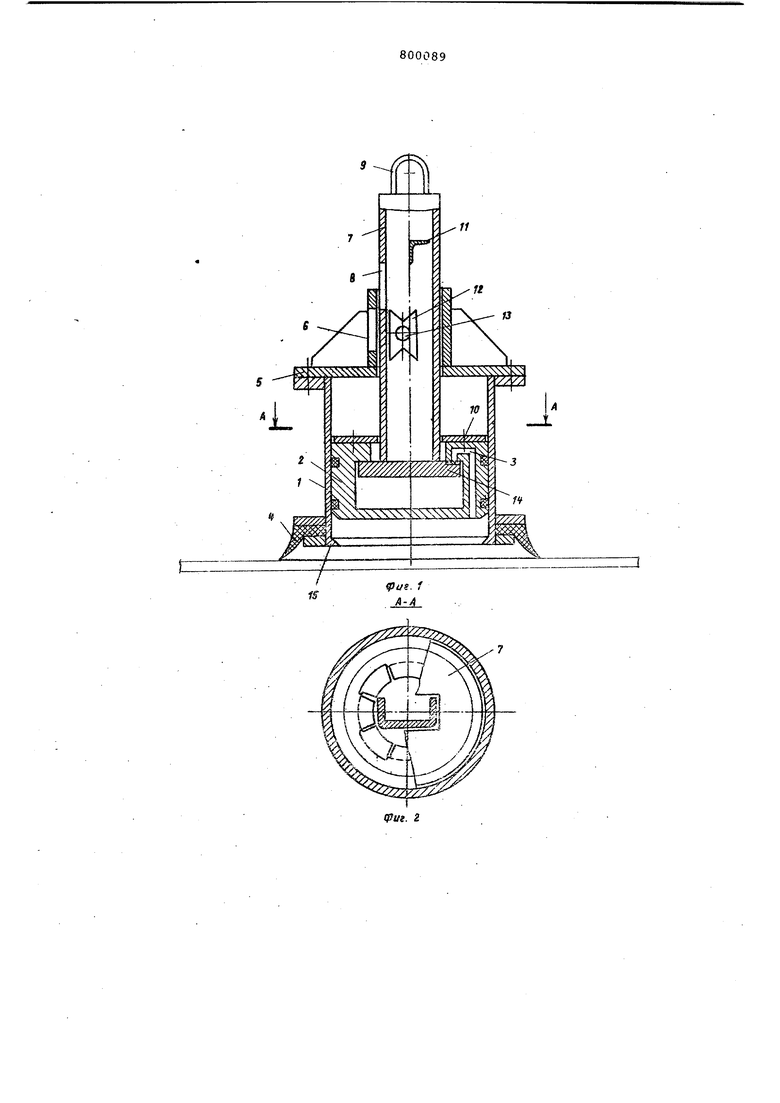
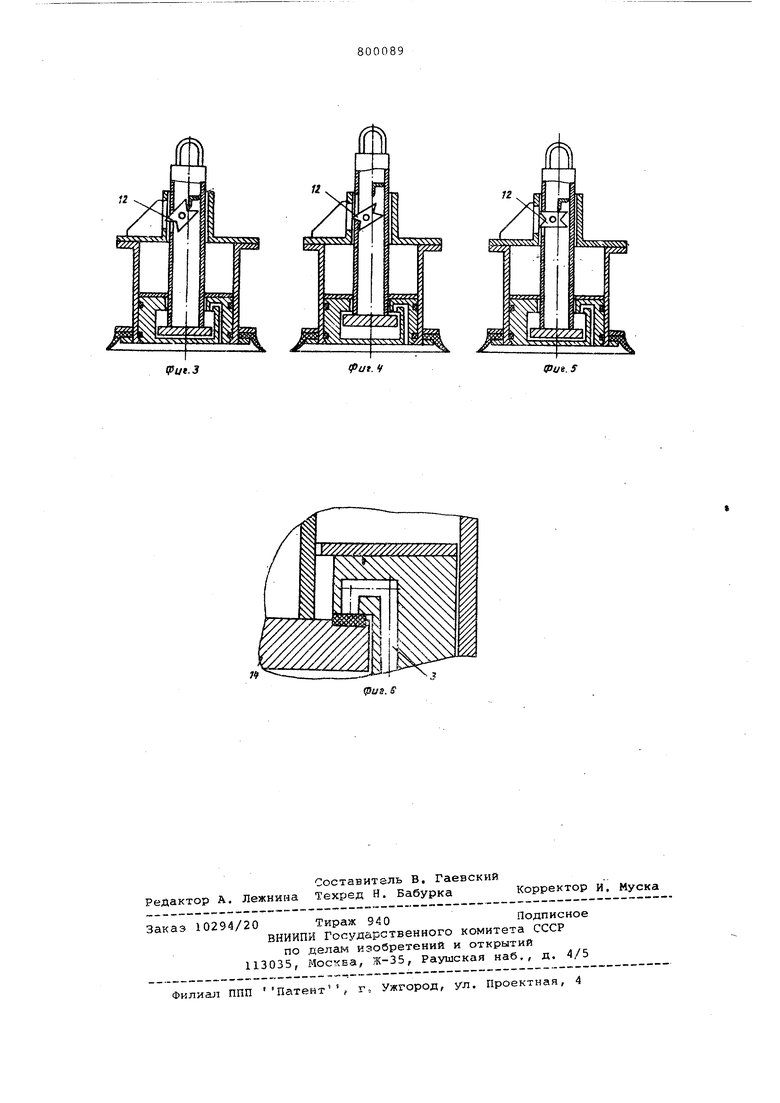
На фиг. 1 схематически показан захват в рабочем состоянии; на фиг.2сечение А-А на фиг. 1; на фиг. 3 состояние захвата при освобождении от груза; на фиг. 4 - то же/ при холостой транспортировке; на фиг. 5 - подготовительное состояние 1ахвата после посадки его на груз; на фиг. 6 - выступ и канал в рабочем положении.
Предлагаемый вакуумный захват содержит корпус 1, поршень с уплотнением 2, в котором ВЫПОЛiSH Г-Об, разный канал 3,элас:тичную уплотнительную манжету 4,крышку 5 корпуса, в которой выполнена прорезь б, ползун 7 с выполненном в нем пазом 8, серьгу 9 для навески на крюк грузоподъемной машини/ крышку 10 поршн фиксирующую положение поршня относительно ползуна,
Захватснабжен механизмом фйксации положения ползуна, который содежит упор .1.1, закрепленный на ползуне, звездочку 12f установленную на крышке корпусана оси ,13. Для ввода ползуна в пол-ость поршня он выполнен с фигурными упорами 14, соответствующими выступам 15, выполненными на боковой поверхности полости поршня„ Упоры 1ползуна после ввода в полость поршня поворачивают вокруг вертикальной оси таким образом, чтобы поршень на .них своим выступами. Для фиксации положения поршня относительно ползуна крышка 10 выполнена с вьзрезом соответствующим контуру сечения ползуна.
Для того, чтобы ограничить ход поршня т-ЧЗ, в нижней части подпсэршневой по.ости корпуса выполнены заплечики.
Предлагаемый захват работает следующим образом.
При транспортировке груза движение ползуна вверх ничем не ограничено и он надежно перекрывает своим упором канал 3 в поршнеf сообщающий подпорглневую полость с атмосферой .
При опускании груза после того, как груз лег на опору, ползун продолжает движение внизи открывает канал 3 в. поршне. При дальнейш ем опускании.ползуна упор 11 воздействует со звездочкой 12 и поворачивает ее вокруг оси 13, При этом звездочка своим лучом заходит з паз 8 ползуна и прорезь б крьгшки корпуса (-фиг, 3) ,
При съеме захэата (С груза п.олзун движется вверх, нижней крс-мкой паза 8 увлекая звездочку и ещз более поворачивая ее вокруг оси 13... дочка поворачивается до тек глор пока не упрется лучок в стенку : зуна. Теперь ползук увлекает sa собой весь захват, ко упоры толаука
при этом не закрывают канал 3, и следовательно, захват груза не происходит (фиг. 4) .
При последующей посадке захвата на груз корпус останавливается, а ползун под действием собственного веса продолжает еще двигаться вниз до тех пор, пока упор 11 ползуна, взаимодействуя со звездочкой 12, не повернет ее вокруг оси 13 из наклонного положенкл в горизонтальное/ Дальнейшее прод;ижание ползуна невозмошт но, так как г репятствует звездочка, yp jSHOBfci:.HHaj воздействием упора с одной стороны-иверхней
5 кромки паза 8 ползуна с другой стороны (фиг, 5). При подъеме груза ползун, взаимодействуя кромкой паза 8 со звездочкой, поворачивает ее в вертикальное положение и, таким образом, имеет неограниченную свободу для движения вверх.
Формула изобретения
1, Вакуумный захват, содержащий навешиваемый на крюк крава ползун с ,поршнем, подвижно установленныг л в корпусе, подпоршневая полость которого имеет уплотнительную манжету и канал для сообщения с атмосферой, и механизм фиксации ползуна относительно корпуса, о т л и ч а ющи и с я тем, что с целью повышения надежности работы, он имеет установленную на верхней наружной
поверхности поршня крышку с вырезом, соответствующим сечению ползуна, в поршне выполнена полость с выступами на боковой поверхности, нижний конец ползуна подвижно устачовлен
Б отверстии крышки и полости поршня и имеет упоры, взаимо.-г.ействующие с, .-ыступамк, при этом канал для
и чценкя подпоршневой полости с -t ферой выполнен в одном из -,
, .сдзсват по п, 1, - о т л I, ч -s хщ и и с я тем, что он снабжен о.граничителем хода поршня, расположенным в нижней части подпоршневой полости, Источники информации,
принятые во внимание при экспертизе 1, Авторское свидетельство СССР № 213315, кл В 66 С 1/02, 1968 (прототип)„
11
13
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1986 |
|
SU1393627A1 |
| Грузозахватное устройство | 1986 |
|
SU1364592A1 |
| Устройство для герметизации сосудов с фланцами | 1988 |
|
SU1615588A1 |
| ЗАПОРНО-РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО | 2004 |
|
RU2279600C1 |
| Вакуумное захватное устройство | 1978 |
|
SU779246A1 |
| Приспособление для вакуумной укупорки стеклянной тары при домашнем консервировании | 1989 |
|
SU1744062A1 |
| Гидравлическое предохранительное устройство от перегрузки механического пресса | 1986 |
|
SU1323413A1 |
| Вакуумное захватное устройство | 1978 |
|
SU768738A1 |
| Вакуумное грузозахватное устройство | 1985 |
|
SU1324980A1 |
| СМЕСИТЕЛЬ И КРАН-ДОЗАТОР | 2004 |
|
RU2273783C1 |