Известны автоматические захваты для штучных грузов, состоящие из двух захватных лап, верхние концы которых соединены с навешиваемой на крюк петлей.
В таких захватах механизм для фиксации лап состоит из храпового колеса, поворачиваемого при каждом цикле работы захвата.
Захват при таком конструктивном выполнении не позволяет транснортировать грузы, существенно отличающиеся по размерам.
Предложенный автоматический захват лишен этого недостатка.
Сущность изобретения заключается в том, что, с целью обеспечения транспортирования грузов, существенно отличающихся по размерам без переналадки захвата, последний снабжен фиксирующим механизмом, храповое колесо которого свободно посажено на ось щарнира захватных лап. Периодический поворот храпового колеса осуществляется посредством подпружиненного кронштейна с собачкой, соединенного при помощи толкателя с захватными лапами.
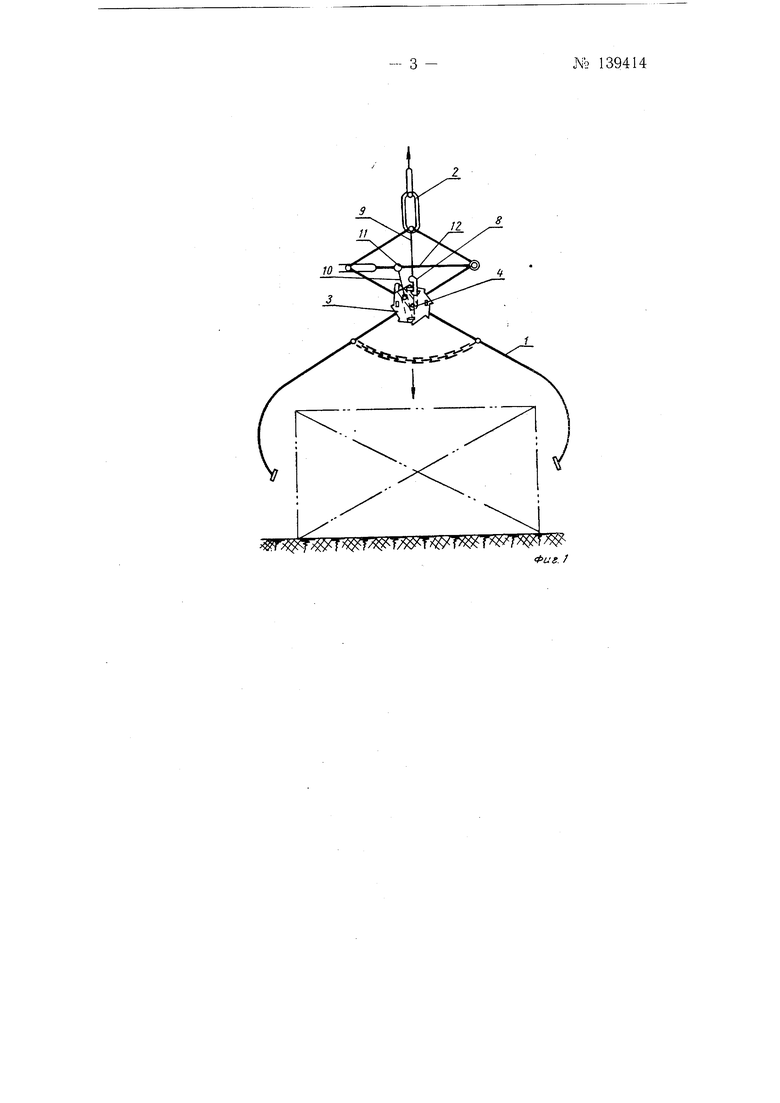
Для периодической фиксации раскрытого захвата храповик оборудован дополнительными торцовыми зубьями, взаимодействующими с подвесной собачкой, укрепленной на кулисе, соединенной с верхними концами лапНа фиг. 1 изображена схема автоматического захвата; на фиг. 2 - механизм фиксации.
Автоматический захват состоит из двух захватных лап /, верхние концы которых соединены с навещиваемой на крюк крана петлей 2 и механизма фиксации лап в раскрытом состоянии.
Механизм фиксации состоит из храпового колеса 3, свободно насаженного на ось 4 шарнира захватных лап /. На оси 4 смонтирован также подпружиненный кронштейн 5 с собачкой 6, взаимодействующей с зубьями храпового колеса.
Для фиксации захвата в раскрытом состоянии, храповое колесо оборудовано дополнительными зубьями 7, расположенными на его тор№ 139414- 2 цовой поверхности и взаимодействующими с подвесной собачкой 8, укрепленной на кулисе Я соединенной шарнирно с верхними концами захватных лап.
При сцеплении собачки 8 с одним из зубьев 7, захватные лапы сомкнуться не могут.
Захват в раскрытом состоянии находится в моменты посадки его на захватываемый груз и освобождения от груза после опускания в нужном месте.
Для того, чтобы сомкнуть лапы при захватывании груза, а также при его освобождении, необходимо вывести из зацепления собачку 8 с зубом 7.
Это происходит при упоре лап захвата в груз, при помощи толкателя W, укрепленного на шарнире 11 тяг 12, соединяющих верхнле концы лап.
В момент упора лап захвата в груз, толкатель 10, опускаясь, поворачивает кронштейн 5 с собачкой 6 на некоторый угол, заставляя разворачиваться храповое колесо и тем самым освобождая находящийся в зацеплеиии с собачкой 8 один из зубцов 7 храпового колесаПредмет изобретения
Автоматический захват для штучных г-рузов, состоящий из двух захватных лап, верхние концы которых соединены с навешиваемой на крюк крана петлей, и снабженный механизмом фиксации лап в раскрытом состоянии, включающим в себя храповое колесо, поворотное при каждом цикле работы захвата, отличающийся тем, что, с целью обеспечения транспортировки различных по размерам грузов без переналадки, храповое колесо фиксирующего механизма свободно посажено на ось шарнира захватных лап, несущую также подпружиненный кронштейн с собачкой, периодический разворот которого при упоре лап захвата в находящийся на земле груз осуществляется при помощи толкателя, укрепленного на щарнире тяг, соединяющих верхние концы лап, причем для периодической фиксации раскрытого захвата, храповик оборздован дополнительными торцовыми зубьями, взаимодействующими с подвесной собачкой, укрепленной на кулисе, соединенной с верхними концами лап.
« 7x TW4; T/wTx T
Фиг. /
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический захват для штучных грузов | 1982 |
|
SU1062167A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Грузозахватное устройство | 1984 |
|
SU1237607A1 |
| Захват с автоматической переналадкой | 1959 |
|
SU125019A1 |
| Автоматический клещевой захват для штучных грузов | 1980 |
|
SU874573A1 |
| Автоматический захват | 1981 |
|
SU977358A1 |
| Устройство для выгрузки из полувагонов штучных грузов | 1955 |
|
SU102943A1 |
| Элеватор для штучных грузов | 1960 |
|
SU138172A1 |
| Захватное устройство для изделий с отверстиями | 1979 |
|
SU931658A1 |
| Захват-кантователь для грузов | 1976 |
|
SU734123A1 |