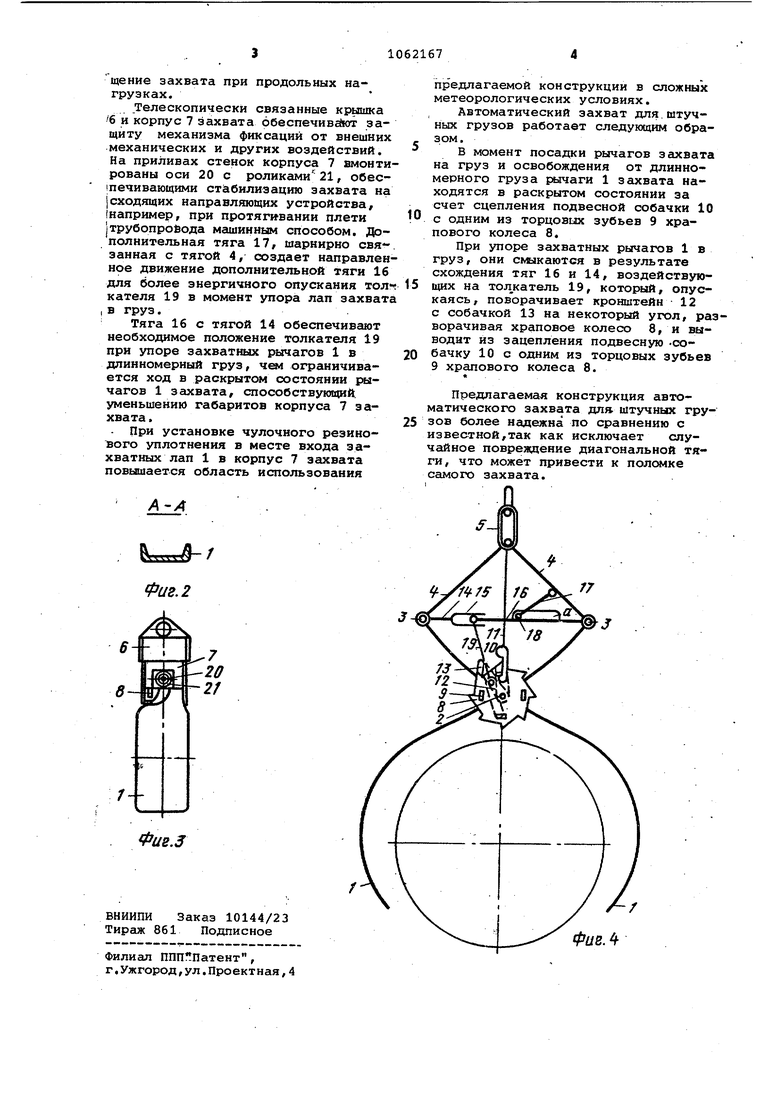
Изобретение относится к грузозахватным устройствам, конструктивно сопряженным или приспособленным для использования с крановыми механизмами для подъема, опускания или перемещения штучных грузов механическо го принципа действия, точнее к грузо захватным устройствам для подъема штучных, например,- длинномерных грузов. Известен автоматический захват .для штучных грузов, содержащий шарнирно соединенные между . собой захватные рычаги, верхние плечи которых шарнирно связаны посредством тяг с осью, соединенной с петлей для навески на крюк грузоподъемной Машины, и механизм фиксации захватных рычагов в раскрытом положении, включающий в себя свободно установленные на оси шарнира соединения захватных рычагов храповое колесо и подпружинен ный кронштейн с собачкой, шарнирно за крепленную одним своим концом на верх нем плече одного из захватных рычагов диагональную тягу, свободный конец которой выполнен в,виде вилки,кинематически связанной с верхним плечом второго рычага, шарнирно прикрепленный одним своим концом к подпружиненному кронштейну толкатель, и шарнирно закрепленную на оси соединения тяг под весную собачку, установленную с возможностью взаимодействия с торцовыми зубвями, смонтированными на храповом колесе l . Однако известное устройство недостаточно надежно из-за того, что диагональная тяга механизма фиксации выходит за пределы шарнирно-рычажног четырехзвенникаj в результате чего возможна деформация конца диагональной тяги, выполненного в виде вилки. Цель изобретения - повышение надежности. Цель достигается тем, что автоматический захват для штучных грузов, содержащий шарнирно сое1диненные между собой захватные рычаги, верхние плечи которых шарнирно связаны посредством тяг с осью, соединенной с петлей для навески на крок грузоподъемной машины, и механизм фиксации захватных рычагов в раскрытом положе,нии, включакнций свободно установленные на оси шарнира соединения згисватных рычагов храповое колесо и подпружиненный кронштейн с собачкой, шарнир но закрепленную одним своим концом на верхнем плече одного из захватных рычагов диагональную тягу, свободный конец которой выполнен в виде вилки, кинематически связанной с верхним пле чом второго Ежочага, шарнирно прикрепленной одним своим кондом к подпружиненному кронштейну толкатель, и шарнирно закрепленную на оси соединения тяг подвесную собачку, установленную С возможностью.взаимодействия с торцовыми зубьями, смонтированными на храповом колесе, снабжен двумя дополнительными тягами, одна из которых шарнирно прикреплена одним своим концом к верхнему плечу второго захватного рычага, а вторым размещена в пазу вилки диагональной тяги и выполнена с продольной прорезью, а вторая шарнирно прикреплена к тяге, соединяющей захватные рычаги с петлей, и снабжена пальцем, размещенным в пазу пер- вой дополнительной тяги, при этом толкатель вторым своим концом прикреплен к первой дополнительной тяге. Такое выполнение захвата позволят ет повысить его надежность. На фиг. 1 изображен автоматический захват для штучных грузов общий вид} на фиг. 2 - разрез А-А на фиг. 1, на фиг. 3 - автоматический захват вид сбокуj на фиг. 4 - кинематическая схема автоматического захвата для: штучных грузов. Автоматический захват для штучных грузов содержит два захватных рычага 1 с осью 2, верхние плечи которых соединены через шарниры 3 (фиг. 4), тяги 4с петлей 5, крыаку 6, телескопически связанную с корпусом 7 захвата, внутри которого вмонтирован механизм фиксации, включающий храповое колесо 8, свободно насаженное на ось 2 с торцовыми зубьями 9, взаимодействующими с подвесной собачкой 10, укрепленной на кулисе 11, закрепленной на оси соединения тяг 4, подпружиненный кронштейн 12 fc собачкой 13, контактирующей с зубьями храпового колеса 8, шарнирно закрепленную одним своим концом на верхнем плече одного из захватных рычагов диагональную тягу 14, свободный конец которой выполнен в виде вилки 15, первую дополнительную тягу 16, шарнирнЬ прикрепленную одним своим конгцом к верхнему плечу второго захватного рычс1га, а вторым размещенную в пазу.вилки 15 диагонгшьной тяги 14 и выполненную с продольной прорезью а , и вторую дополнительную тягу IT, шарнирно прикрепленную к тяге 4 и снабженную пальцем 18, размещен- ным в первой дополнительной тяги 16, при ЭТОМк первой дополнительной тяге 16 шарнирно прикреплен толкатель 19, другой конец которого прикреплен к подпружиненному кронштейну 12. Захватные рычаги 1 имеют швеллерное сечение с полками, соответствующими, например, высоте выступа на грузе, например, раструбного соединеТ ия секции сборно-разборного трубопровода, что предотвращает переме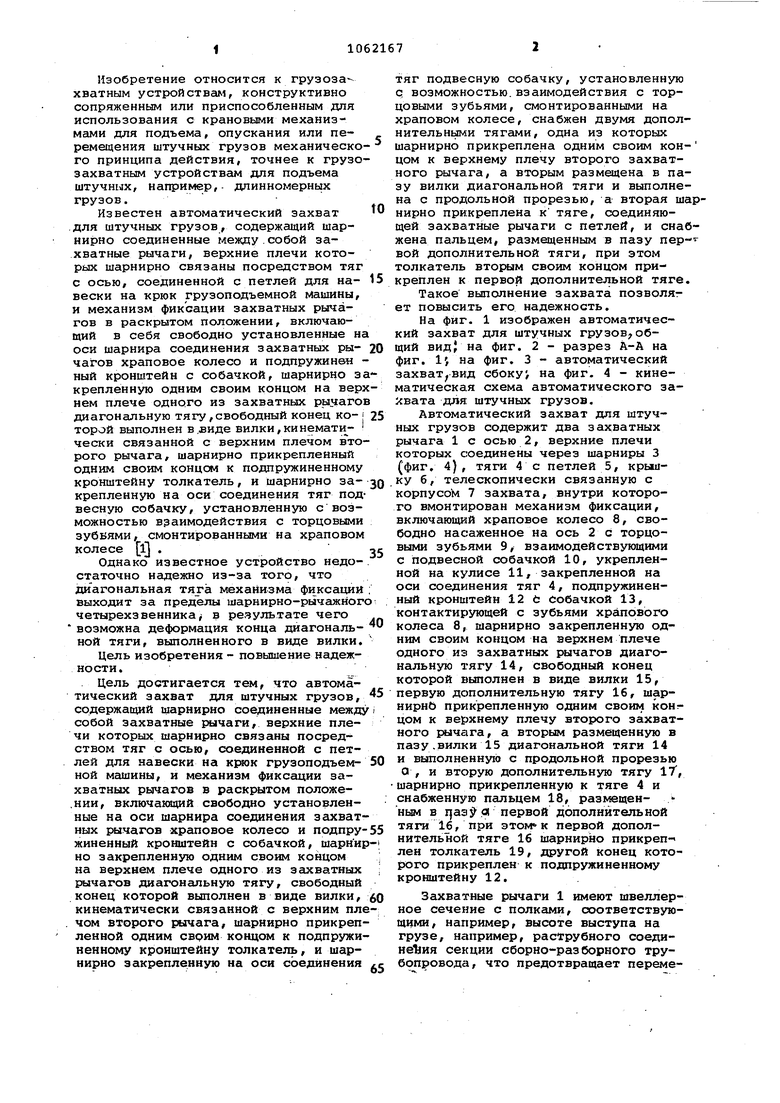
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический захват для штучных грузов | 1960 |
|
SU139414A1 |
| Механическая рука для транспортирования банок щелочных аккумуляторов | 1977 |
|
SU683898A1 |
| Грузозахватное устройство | 1981 |
|
SU981182A1 |
| Ударный инструмент | 1983 |
|
SU1105284A2 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2038252C1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Швейный полуавтомат для изготовления прямых петель | 1968 |
|
SU649765A1 |
| Захватное устройство для контейнеров с цапфами | 1980 |
|
SU901236A1 |
| Грузозахватное устройство | 1988 |
|
SU1652277A1 |
| Грузозахватное устройство | 1977 |
|
SU839978A1 |
АВТОМАТИЧЕСКИЙ ЗАХВАТ ДЛЯ ШТУЧНЫХ ГРУЗОВ, содержащий шарнирно соединенные мел01У собой захватные рычаги, верхние плечи jtoiopax связаны посредством тяг с осью, соединенной с петлей для .навески на крок грузоподъемной машины, и механизм фиксации захватных рычагов в раскрытом положении, ююющий свободно установленные на оси шарнира соединения згисватных рычагов храповое колесо и подпружиненный кронштейн с собачкой, шарнирно закрепленную одним концом на верхнем плече одного из захват«sajL-,/ «.. ных рычагов диагональную .тягу, свободный конец которой выполнен в виде вилки, кинематически связанной с верхним плечом второго рычага, шарнирно прикрепленный одним своим концом к подпружиненному кронштейну толкатель и шарнирно закрепленную на оси соединения тяг подвесную собачку, установленную с возможностью взаимодейстш я с торцовыми зубьями смонтирЬванными на храповом колесе, отличающийся тем, что, с целью повьшения надежности, он снабжен двумя дополнительными тягами, первая из шарнирно при- i креплена одним конц(ХИ к верхнему плечу второго згисватного рычага, а дру- § гим размещена в пазу вилки диагональной тяги и выполнена с продольной про- -j резью, а вторая тяга шарнирно при креп-, лена к тяге соединяющей захватные рычаги с петлей, и снабжена пальцем, размещенным в пазу первой дополнительной тяги, при этом толкатель вторым своим концом прикреплен к первой дополнительной тяге.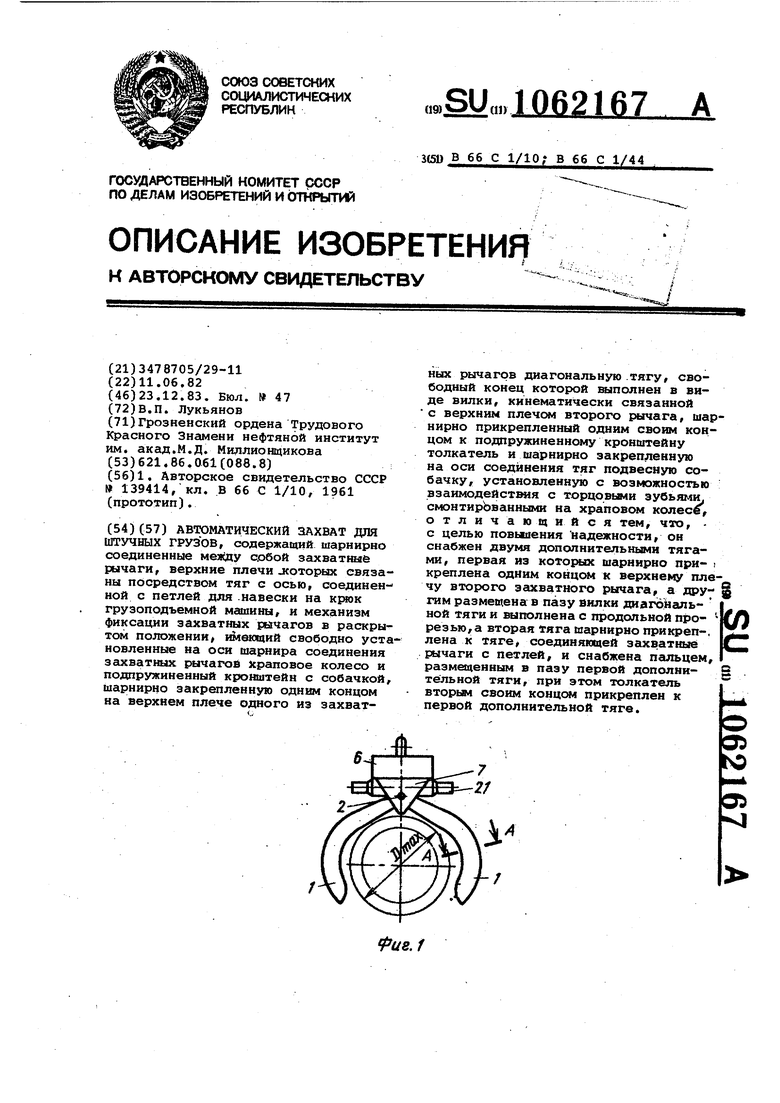
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Автоматический захват для штучных грузов | 1960 |
|
SU139414A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
