со СО
О5
со
I Изобретение относится к электротехнике I и может быть использовано в электропри- водах мостовых кранов, разводных мостов, конвейеров и т.н.
Цель изобретения - упрощение согласования угловых положений роторов асин- 5 хронных двигателей при зануске и реверсе. На чертеже представлена принципиальная э.лектрическая схема многодвигательно- i го электропривода неременного тока. I Многодвигательный электропривод пере- |„ I менного тока содержит два асинхронных двигателя 1 и 2 с фазным ротором, валы которых соединены с соответствующей нагрузкой 3 или 4, индукционный реостат 5 с двумя трехфазными обмотками 6 и 7, концы фаз каждой из обмоток 6 и 7 объедине- 15 I ны, начала фаз каждой из. обмоток 6 и 7 под- ключены к выводам обмоткн ротора соот- I ветствующего асинхронного двигателя 1 или 2.
п -отношение чисел витков первичной и вторичной обмоток индуктивно связанного элемента цепи;
Zii Rupi-|-ja)Lupi;
Z22 (RuP2-f-jwLup2)n-;
Zb Z2I jojMn.
Так как условием равенства скоростей является равенство ЭДС Ё| и Ё2, то
l|Z||-(-l2Z|2 1|Z|2 .-2 - - 2il1Определим значение тока Ig:
(3)
2
,Z,rrzZk
222 - Z2I
(4)
Таким образом, из уравнения (4) видно, что при изменении тока Ii соответственно изменяется ток {2 и наоборот, т.е. магнитно связанные контуры непрерывно взаимно вли- Принцин действия многодвигательного яют друг на друга, вследствие чего вырав- электропривода заключается во взаимном 20 „. скорости вращения обоих двигате- I влиянии двух индуктивно связанных кон- I туров, образованных об.мртками 6 и 7 милей.
Предлагаемый .многодвигательный элект- |дукционного реостата 5. Условием выравни- ропривод переменного тока по своей сути не ; вания скоростей вращения обоих двигателей отличается от электрического рабочего ва- 1 и 2 является баланс ЭДС их роторов. 25 ла (ЭРВ) поэтому его можно назвать элект- Уравнение баланса имеет следу ощий вид:ромагнитным рабочим валом (ЭМРВ).
ЭМРВ по сравнению с ЭРВ характеризуется тем, что он обеспечивает возможность раздельного пуска в работу приводных двигателей, работающих на общую нагрузку, 30 но не имеющих механической связи. Кроме того, при совместном пуске исключается
(1)
Ei URLjpi + ULUp,-t-UMi;
E2 URLJP2- -UiUP2+UM2,
где URUP| I|Rb Ri; IjLUPi lijuLiUPi; им| шМ12;
URUP2 i2RL P2; UlliP2 l2 jtl l4- P2;
UM2 jcoMii;
Ё| - ЭДС ротора первого двигателя;2 - ЭДС ротора второго двигател я;
Rup| и jooLupi - активное и индуктивное сон- 35 ротивления индукционного реостата, относящиеся к первому двигателю; Rup2 и j(i)Lup2 - активное и индуктивное сонеобходимость предварительной синхронизации угловых положений роторов.
Формула изобретения
Многодвигательный электропривод переменного тока, содержащий два асинхронных двигателя с фазным роторо.м, трехфазный индукционный реостат с одной трехфаз- противления индукционного ной обмоткой, концы которой объединены, реостата, относяпдиеся к второму двига-а начала подключены к выводам обмотки
телю;ротора одного асинхронного двигателя,
jwM - сопротивление взаимоиндук- отличающийся тем, что, с целью упроще- ции;ния согласования угловых положений роторов асинхронных двигателей при запуске и 45 реверсе, трехфазный индукционный реостат дополнен.другой трехфазной обмоткой, концы фаз которой обтзединены, а начала под- /2)ключены к выводам об.мотки . ротора другого асинхронного двигателя в соответствии с фазировкой первого асинхронного
( (f - частота тока роторов). Преобразуем систему уравнений (1) в уравнения четырехполюсника
Ei I|Zj i -|-I2Z|2;
+I2Z22,
где Е2 Е2п;
12 i-4;
50
двигателя.
п -отношение чисел витков первичной и вторичной обмоток индуктивно связанного элемента цепи;
Zii Rupi-|-ja)Lupi;
Z22 (RuP2-f-jwLup2)n-;
Zb Z2I jojMn.
Так как условием равенства скоростей является равенство ЭДС Ё| и Ё2, то
l|Z||-(-l2Z|2 1|Z|2 .-2 - - 2il1Определим значение тока Ig:
(3)
2
,Z,rrzZk
222 - Z2I
(4)
что изме связа яют „.ва
лей.
необходимость предварительной синхронизации угловых положений роторов.
Формула изобретения
гого асинх вии с фаз
50
двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод переменного тока | 1988 |
|
SU1577065A2 |
| Многодвигательный электропривод переменного тока | 1990 |
|
SU1707728A1 |
| Электропривод переменного тока | 1991 |
|
SU1823117A1 |
| Многодвигательный электропривод переменного тока | 1988 |
|
SU1661960A1 |
| Многодвигательный электропривод переменного тока | 1984 |
|
SU1234941A1 |
| Многодвигательный электропривод переменного тока | 1986 |
|
SU1494194A2 |
| Многодвигательный электропривод переменного тока | 1986 |
|
SU1432718A2 |
| Многодвигательный электропривод | 1985 |
|
SU1339867A1 |
| Многодвигательный электропривод переменного тока | 1985 |
|
SU1365338A1 |
| Асинхронный электропривод | 1989 |
|
SU1663727A1 |
Изобретение относится к электротехнике и может быть использовано в электроприводах мостовых кранов, разводных мостов, конвейеров и т.п. Цель изобретения - упрощение согласованных угловых положений роторов асинхронных электродвигателей при запуске и реверсе. Многодвигательный электропривод содержит два асинхронных двигателя с фазным ротором и индивидуальной нагрузкой 3 (4), трехфазный индукционный реостат 5 с обмотками 6, 7, подключенными к выводам обмоток ротора асинхронных двигателей 1, 2. Выравнивание частот вращения двигателей осуществляется за счет магнитной связи цепей ротора.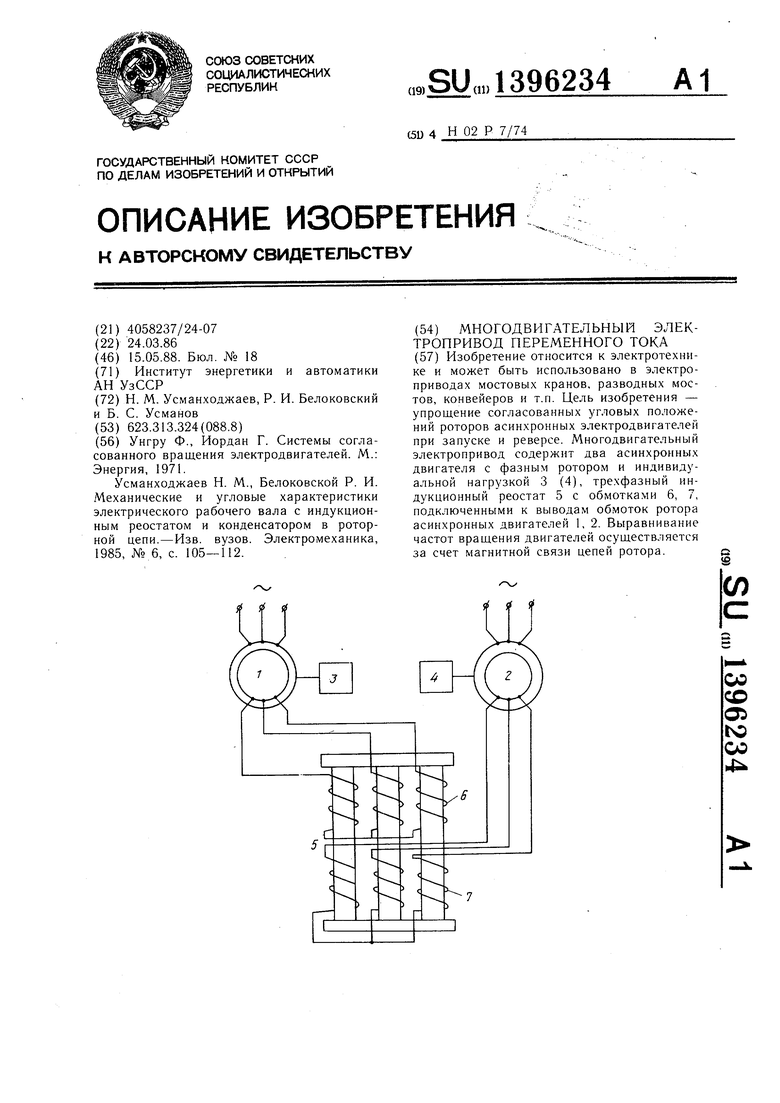
| Унгру Ф., Иордан Г | |||
| Системы согласованного вращения электродвигателей | |||
| М.; Энергия, 1971 | |||
| Усманходжаев Н | |||
| М., Белоковской Р | |||
| И | |||
| Механические и угловые характеристики электрического рабочего вала с индукционным реостатом и конденсатором в роторной цепи.-Изв | |||
| вузов | |||
| Электромеханика, 1985, № 6, с | |||
| Транспортер для перевозки товарных вагонов по трамвайным путям | 1919 |
|
SU105A1 |
